Изобретение относится к электроприводу переменного тока, предназначенного для использования с частотно-регулируемым асинхронным двигателем.
Известн1 1 способы управления асинхронным двигателем в электроприводах переменного тока с преобразователем частоты для питания двигателя 1 и 2.
Известные способы характеризуются тем, что управление двигателем осуществляют по двум каналам; каналу скорости и каналу потокосцепления ротора, построенным в координатах, св 1 анных с вектором потокосцепления ротора Фр . Подчиненн1)1ми контурами являются контуры токов статора по оси, связанной с Фр и оси, перпендикулярной Фр. Ориентапию но вектору фр осун1ествляют путем измерения фазовых значений потокоспеп.ления ротора при помощи датчиков Холла или специальных обмоток и вычисления но этим значениям гармонических функп2111 , со.чФ (Ф - угол .между вектором Фр и обмоткой ()азы «А статора).
Такой способ ориентации практически трудно осуществим, так как установка датчиков .Холла в асинхронном двигателе иредставляет собой сложную проблему, а вычислительные узлы, используем1 1е для определения | армонических функций (вектор - фильтр, делители) - наиболее с.чожные li ненадежные элементы системы управления.
Из известных реп1ений наиболее б.чизким к изобретению по технической сущности и достигаемому результату является способ управления э.чектропри водом переменного тока с асинхронным электродвигателем и преобразователем частоты в статоре путем регулирования потокоспеплеиия статора и скорости с применение : координатных преобразованнй сигналов нулевой частоты в сигналы управления преобразователем и сигналов частоты напряжения статора в сигналы обратных связей каналов регулирования |3.
В известном способ у 1равлсние осуществляют непоередствепиым регулированием MOMeirra и потокосцеиления статора в соответствуюпшх каналах, что новыщает надежность управления и упрощает систему регу .П1рования.
Однако, и здесь гармонические функпиг, sin f), co.s б (б угол между вектором
и обмоткой фазы «А статора) вычисляют 110 показаниям латчиков Холла, установка которых снижает надежность регулирования и усложняет реализацию способа.
Целью изобретения является повышенне надежности управления при одновременном упрощении его реализации.
Поставленная цель достигается благодаря тому, что дополнительно формируют сигнал, пропорциональный составляющей по токосцепления статора по оси, перпендикулярной вектору потокосцепления статора, и используют этот сигнал в качестве сигнала обратной связи в канале регулирования потокосцепления статора, задающий сигнал на входе которого устанавливают равным нулю, ориентируя тем самым каналы регулирования по вектору потокосцецления статора при независимом по фазе задании синус-косинусных сигналов для координать ых преобразований.
, Способ может быть осуществлен устройством новой конструкции, содержащей асинхронный двигатель, преобразователь частоты в статоре и каналы регулирования скорости (момента) и потокосцепления статора, а также блок координатных преобразований с подключенным к его. выходу блоком компенсирующих связей; в устройство введен блок вычисления перпендикулярной составляющей потокосцепления статора, входы которого подключены к выходам упомянутых блоков координа- ных преобразований и компенсирующих связей, а выход - ко входу для сигнала обратной связи элемента сравнения в канале регулирования потокосцепления статора.
При регулировании по описываемому способу системе задается угол ориентации вектора потокосцепления и выходной параметр электропривода - момент. При этом отпадает необходимость в специальных датчиках и вычислительных устройствах для измерения, и вычисления угла ориентации вектора, что существенно упрощает систему регулирования. Амплитуда вектора потокосцепления может задаваться косвенным образом, по одному из условий: минимума потерь, минимума токов, поддержания потокосцгпления на заданном уровне и т. п. путем регулирования абсолютного скольжения .
При таком способе регулировання величины потокосцеплений нужны лищь для контроля системы, а не ориентации, и потому отпадает необходимость в сложной системе измерительных датчиков, вектор-фильтра и вычислительного узла для определения потокосцепления и угла ориентации (или так называемых гар.монических функцкй).
Данный способ .пизуется при ориентации системы регулирования по втектору потокосце и1ения статори. т. е. при направЛенин оси «д nd вектору pg и оси .«i -iro вектору, опережаюнхему Фд на 90 эл. град. Ориентация системы по вектору фд производится заданием . %j О, т. е. каналом регулирования по оси «i должен быть канал регулирования потокосцепления, а задающий сигнал канала равен нулю. Тем самым вектор потокосцепления статора «привязывается к вектору напряжения независимого синус-косинусного генератора.
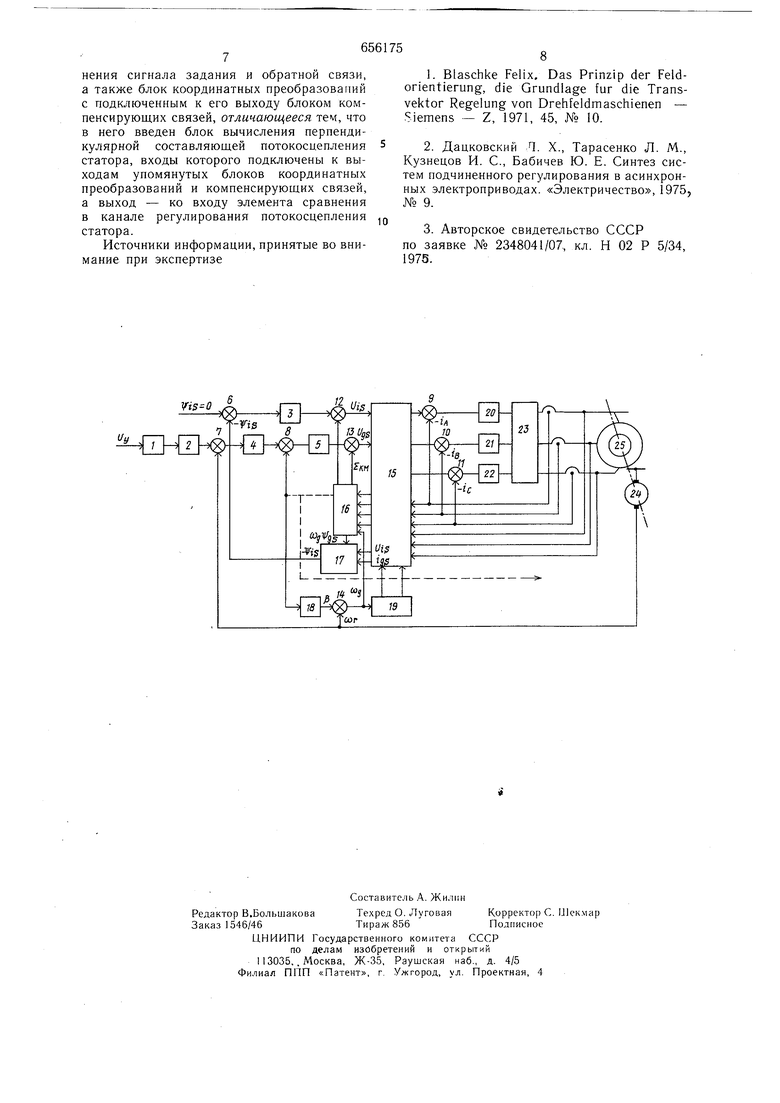
На чертеже изображена функциональная схема способа управления.
Способ управления содержит задатчнк интенсивности 1, фильтр 2, регулятор потокосцепления 3, регулятор скорости 4, регулятор момента 5, элементы сравнения 6-11, сумматоры 12, 3 и 14, координатный преобразователь 15, блок компенсирующих связей 16, блок вычисления 17 перпендикулярной составляющей потокосцепления, нелинейный преобразователь 18, независимый задатчик частоты 19, регуляторы фазных токов статора 20-22, преобразователь частоты 23, тахогенератор 24, асинхронный двигатель АД-25.
Способ содержит два канала регулирования, работающих на нулевой частоте - канал регулирования потокосцепления статора и канал регулирования скорости (момента).
Канал регулирования потокосцепления статора содержит элемент сравнения 6, лервьш входом соединенный с источником нулевого сигнала (Visg 0), а вторым входом связанный с блоком вычисления перпендикулярной составляющей потокосцепления 17. Выход элемента 6 подключен к регулятору 3, выход которого через сумматор 12 связан с координатным преобразователем 15. Второй вход сумматора соединен с выходом блока компенсирующих связей 16.
Канал регулирования скорости содержит задатчик интенсивности 1, выход которого через фильтр 2 связан с первым входом элемента сравнения 7, второй вход которого подключен к выходу датчика скорости (тахогенератора 24), а выход - ко входу регулятора скорости 4. Выход регулятора скорости соединен с первым входом элемента сравнения 8, второй вход которого связан с источником сигнала обратной связи по моменту (с блоком 16 или с датчиком момента). Выход элемента сравнения 8 соединен с регулятором момента 5, выход которого через, сумматор 13 связан с координатным преобразователем. Второй вход сумматора 13 соединен с блоком 16. Входы блока соединены с выходами преобразователя. Другие выходы преобразователя связаны .через элементы сравнения 9, 10 и II и регуляторы фазных токов 20, 21 и 22 с преобразователем частс) 23. Выходы преобразователя 4acfoты 23 связаны с обмотками статора асинхронного двигателя .
Ко входам преобризопателн подключены также выходы датчиков токов и i(anpH KefiHH статора, а также выходы сииус-косинус1гого независимого задатчика- частоты 9. Вход независимого задатчика частоты связан через сумматор 14 с нелинейным преобразователем. Второй вход сумматора связан с выходом датчика скорости (тахогенератора 24).
Управление по способу осуществляется следующим образом.
На входы координатного преобразователя от независимого задатчика частоты подают сигналы - гармонические функции нроизвольной фазы sin 6 . cos 6 . На вход канала регулирования потокосцепления подают нулевой задающий сигнал (4iss 0), «приг вязывая тем самым вектор потокасцепления статора4 3 к гармоническим сигналам. В канале регулирования потокосцепления при помощи регулятора с элементом сравнения 6 и сумматора 12 формируют сигнал канала управлен ия. Uis по оси, перпендикуляр2 ой вектору Фз : при отклонении величины Pij от нулевого значения изменяется выходной сигнал элемента 6. Этот сигнал преобразуют в регуляторе 3, суммируют с сигналом компенсации в сумматоре 12 и полученный сигнал Uis подают на преобразователь.
Каналом регулирования скорости при по; мощи задатчика интенсивности 1, фильтра 2, регулятора скорости, регулятора момента, элементов сравнения 7 и 8 и сумматора i3 формируют сигнал управления гфи изменении задающего сигнала по скорости или моменту нагрузки изменяется сигнал на входе регулятора скорости. Измененный сигнал преобразуют в регуляторах скорости и момента, суммируют с сигналом компенсации ZK«, и полученный сигнал Удд подают на преобразователь.
Сигналы Uis, UAS в координатном преобразователе преобразуют в сигналы управления для преобразователя частоты 23 напряжения статора UyA, Uye, Uyc.
В координатно.м преобразователе производят также обратные операции: преобразуют сигналыфазных величин токов и нап-ряжений статора АД в сигналы в координатах g, i для вычисления сигналов компенсации и обратных связей.
J;
Сигналы 1д5, iis, Ufti, Uis в блоках 16 и 17 преобразуют в сигналы компенсации Z|,, ZKM и сигнал обратной связи по потокосцеплению статора по формулам:
Z«, ; Vffr- +
ZKM - Uls APМрФврЧдз
/(b4s - 111дЧ „з - rjiijdt
Has T,( URS + 1 .)д «Us - Гз 1дз ) d t
« ,,
где Гд - сопротивление статора, Lg, l-p, Lrr,соответственно индуктивности статора, ротоpOi взаимоиндукци« статора и ротора. Us,
i-f..f.s: .iV напряжения и потокосцепления
статора и ротора, 8 « .im,. коэ(1)ts 1г.
фицнент рассеяния, ол --частота вектора потокосцепления статора, равная
часгик сигналов независимого задатчика частоты 19 sin 5, cos б.
Величину сигнала обратной связи по мо.MeiiTy {если отсутствует датчик момента) получают по формуле:
М k C Jflsii -- isUs).
При рассмотренном способе управ тения могут бьггь минимизированы потери, а величина потокосцепления статора Ss может поддерживаться на заданном уровне. Для этЬго частоту независимого задатчика частоты йд задают равной сумме (ы + /i}, где I - величина абсолютного скольжения, которую формируют нелинейным преобразователем 8 в зависимости от момента нагрузки и %,j .
Таки.м образом, изобретение позволяет сочетать высокие динамические показатели {управление моментом двигателя в переходных процессах) на уровне из естных систем с хорощими энергетически.ми показателями путем регулирования абсолютного скольжения из условий минимизации потерь {или токов) или поддерживания постоянства потокосцепления статора. При этом система по изобретению значительно проще и надеж-ней известных систем.
Формула изобретения
1. Способ управления электроприводом переменного тока с асинхронным электродвигателем и преобразователем частоты в статоре путем регзлнрования потокосцепления статора и скорости, включающий координатные преобразованпя сигналов нулевой частоты в сигналы управле П1я преобразователем и сигналов частоты напряжения статора в сигналы обратных связей каналов регулирования, отличающийся те.м, что, с целью повышения надежности управления, при одновременном упрощении его реализации, формируют сигг1ал, пропорциональный
составляющей потокосценления статора по оси, перпендикулярной вектору потокосцепления статора, и используют этот сигнал в качестве сигнала обратной связи в канале регулирования потокосцепления статора, задаю1Д Й сигнал, на входе которого устанавливают равным нулю, ориентируя тем самым каналы регулирования но вектору потокосцеплення статора при независи.мом по фазе задании синус-косинусных сигналов для, координатных преобрал.1ваннй.
2. Устройство для осуществления спосоЛа по п. , содержащее канал регулирования потокосцеплен-ия статора с элементсхм cfianнения сигнала задания и обратной связи, а также блок координатных преобразовапий с подключенным к его выходу блоком компенсирующих связей, отличающееся тем, что в него введен блок вычисления перпендикулярной составляющей потокосцепления статора, входы которого подключены к выходам упомянутых блоков координатных преобразований и компенсирующих связей, а выход - ко входу элемента сравнения в канале регулирования потокосцепления статора.
Источники информации, принятые во внимание при экспертизе
1. Blaschke Felix, Das Prinzip der Feldorientierung, die Grundlage fur die Transvektor Regelung von Drehfeldmaschienen - Siemens -- Z, 1971, 45, № 10.
2.Дацковский Л. X., Тарасенко Л. М., Кузнецов И. С., Бабичев Ю. Е. Синтез систем подчиненного регулирования в асинхронных электроприводах. «Электричество, 1975, № 9.
3.Авторское свидетельство СССР
по заявке № 2348041/07, кл. Н 02 Р 5/34 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления асинхронным двигателем | 1976 |
|
SU657559A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Электропривод с асинхронным двигателем с массивным обмотанным ротором | 1976 |
|
SU610276A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1973 |
|
SU517126A1 |
| Асинхронный электропривод | 1975 |
|
SU809461A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для управления электрической машиной с фазным ротором | 1977 |
|
SU720652A1 |
Uy
