I
Изобретение относится к области землеройных машин и касается гид ювлического привода механизма поворота платформы эскаватора.
Известен механизм поворота платформы эскаватора, состоящий из нескольких гидроцилинаров, укрепленных на верхней платформе и связанных с опорной рамой соединением типа кривошипа ll .
Недостатком известного механизма ЯВПЯ ется отсутствие устройств для снижения и стабилизации динамических нагрузок, неизбежно возникающих при работе экскаватора в плоскости поворота.
Наиболее близким к предлагаемому является механизм поворота платформы экскаватора, включающий зубчатый венец, эксцентрики с ведущими шестернями и гидравлический привод, содержащий гидроцилиндры, св} занные с эксцентриками, гидронасос, гидропневмоакку /|улятор и магистрали высокого и низкого давления 2j , В атом механизме не предусмотрено рациональное расположение гидроцилиндров с точки зрения стабилизации вращающего момента.
Кроме того, не предусмотрена возможность регулирования упругоцемпфирующих свойств механизма поворота. В процессе работы экскаватора механизм поворота платформы подвержен динамическим воздействиям со стороны рабочего органа, величина которых как по амплитуде, так и по частоте может быть различной в зависимости от конкретных горно-геологических условий. Так как экскавационные машины, для которых предназначены рассматриваемые конструкции, обладают достаточно широким спектром собственных частот, то помимо ударных нагрузок, вызываемых указанньтми выше возмущениями, возможно возникновение резонаг ных явлений, которые отрицательно влияют на работу гидроаппаратуры и металлоконструкции, ухудшают санитарно-гигиенические условия труда обслуживающего персонала.
Целью lзoбpeтeния является снижение и стабилизация динамических нагрузок в механизме поворота платформы экскаватора, возникающих как в рабочих, так и в пере-;ходных режимах.
Указанная цель достигается тем, что привод выполнен в виде групп гиароцилиндров, расположенных относительно оси ведущей шестерни под углом ос друг к другу и кинематически связанных с соответствующим эксцентриком, причем эксцентрики расположены под углом {Ь к оси, соединяющей центры платформы и ведущих шестерен, а гидропмевм6акку «улятор снабжен дополнительными гидро- и пневмоем- костями с регулируемым объемом и соединен с линией высокого давления посредство регулируемого дросселя. При этом углы об к jb определяются из следующих соотношений:
г-R т
23t
(i-i)
а
ft
rt - число групп гидроцилиндров,
где ги - число гидроцилиндров в группе, i - порядковый номер группы.
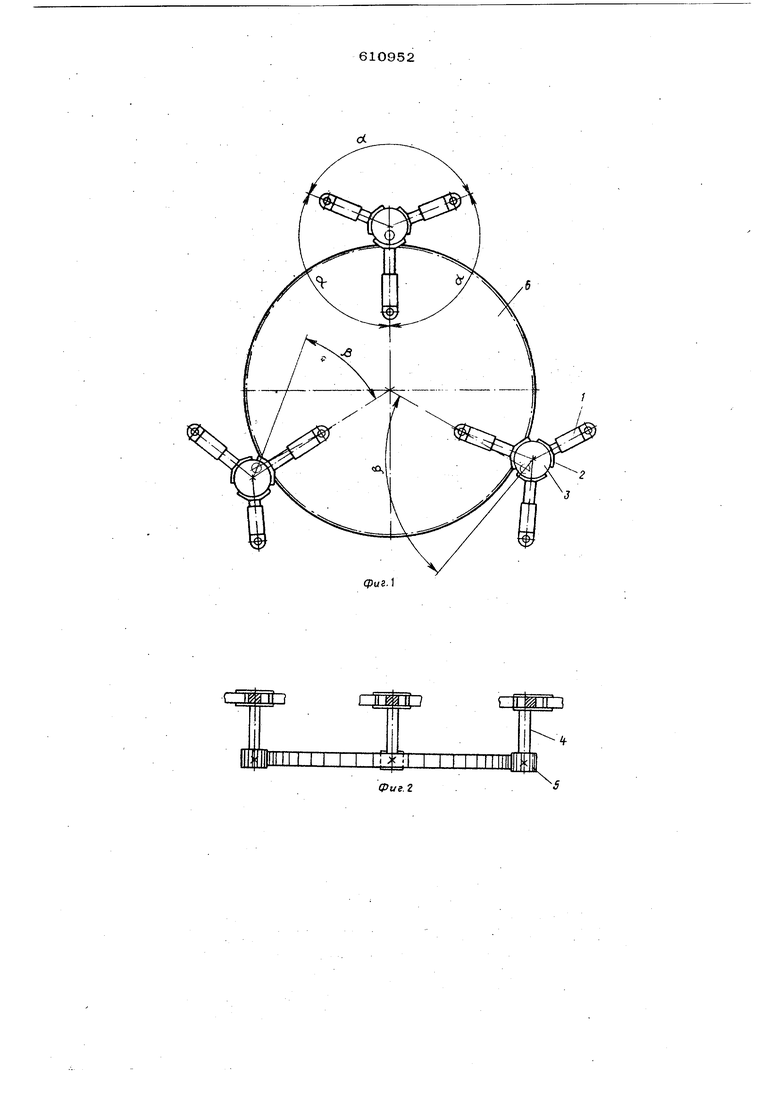
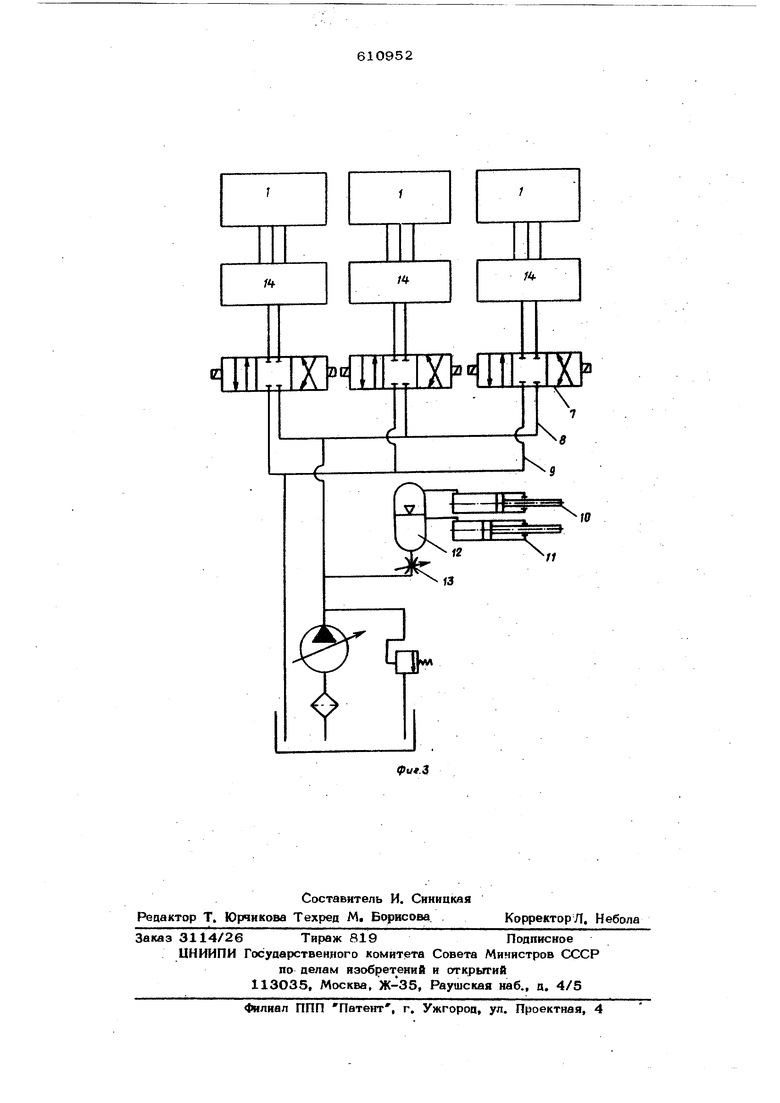
На фиг. 1 изображена кинематическая схема механизма поворота платформы экска торе, вид сверху; на фиг. 2 - та же схема механизма поворота, вид сбоку; на фиг. 3 .- его гидравлическая схема.
Общее число гидроцилиндров механизме поворота платформы экскаватора должно быть нечетным, так как в этом случае достигается минимальное значение неравномерности вращакмцего момента. Механизм поворота, изображенный на фигурах, содерьжит три группы гидроцилиндров. В каждой группе находится по три гидроцилиндра 1 одностороннего действия, которые через баипиаки 2 и эксцентрик 3, насаженный на вал 4, {см. фиг. 2), кинематически связан с ведущей шестерней 5 и зубчатым венцом 6 (см. фиг. 1) опорной рамы. На оси вала 4 находится распределительное устройство, которое через золотник 7 (см. фиг. 3) соединено с линиями высокого 8 и низкого 9 давления. Дополнительные пневмо- и гйдроемкости 1О и 11, имеющие регулируемый объем, с гидропнеаматически аккумулятором 12 соединяются с линией высокого давления 8 через регулируемый дроссель 13.
При нейтральном положении золотника 7 давление газа в аккумуляторе 12 равно зарядному, поршневые полости гидроцилиндров заперты. Перемещение золотников в одно из крайних положений соответствует началу движения плунжеров гидроцилиндров 1, которые благодаря конструктивной компоновке, определяемой углами 2ft2Л .
rt - число групп гидроцилиндров,
где Ш - число гидроцилиндров в группе, i - порядковый номер группы, и распреаелителям 14 потока жидкости поочередно совершают возвратно-поступательное движение, что обеспечивает равномерность вращающего момента на поворотной платформе экскаватора.
Благодаря наличию аккумулятора и дополнительных емкостей происходит плавное нараст.ание давления, плавный разгон поворотной платформы.
Путем настройки дросселя и изменения
0 объема дополнительных емкостей в зависимости от конкретных горно-геологических условий работы экватора осуществляется формирование необходимых динамических характеристик и тем самым исключается
5 возможность появления резонансных явления в гидроприводе, уменьшаются пики возмущающего воздействия со стороны рабочего органа, снижаются и стабилизируются
0 динамические нагрузки.
В установившемся рабочем режиме наличие дополнительных емкостей и дросселя позволяет эффективно противодействовать не только случайным, но и периодическим
5 составляющим динамического воздействия со стороны рабочего органа.
Формула изобретения
Механизм поворота платформы экскаватора, включающий зубчатый венец, эксцентрики
0 с ведущими шестернями и гидравлический привод, содержащий гидроцилиндры, связанные с эксцентриками, гидронасос, гидропневмоаккумулятор и магистрали высокого и низкого давления, отличаю щий5с я тем, что, с целью снижения и стабилизации динамических нагрузок, привод выполнен в виде групп гидроцилиндров, расположенных относительно оси ведущей шестерни под углом оС/ друг к другу и кинематически связанных с соответствующим эксцентриком, причем эксцентрики расположены под углом /Ь к оси, соединяющей центры платформы и ведущих шестерен, а гидропневмоаккумулятор снабжен дополни5тельными гидро- и пневмоемкостями срегулируемым объемом и соединен с линией высокого давления посредством регулируемого дросселя, при этом углы оС и у/& определяются из следующих соотношений:
O
2Л . 2f
тгг/ тд -)
«
П - число групп гидроцилиндров,
где Ц1 - число гидроцилиндров в группе, ) - порядковь1Й номер группы. Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство № 122437, trt. Е О2 Р 9/12, 1961.
2.Патент ФРГ № 1272236, кл. 84 li 9/20,. 1968.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| Рекуперативный гидропривод лесовозного автомобиля | 2017 |
|
RU2668093C1 |
| Импульсный привод роторного экскаватора | 1980 |
|
SU939650A1 |
| Гидропневматическая независимая подвеска колесного модуля транспортного средства | 2017 |
|
RU2682943C1 |
| Рекуперативный гидропривод лесовозного автомобиля с прицепом | 2019 |
|
RU2714041C1 |
| Привод горной машины | 1990 |
|
SU1747689A1 |
| Гидравлический роторный экскаватор | 1985 |
|
SU1305256A1 |
| Механизм поворота платформы экскаватора | 1981 |
|
SU1016448A1 |
| Стенд для испытания самоходных корнеклубнеуборочных машин и имитатор нагрузок на копатели корнеклубнеуборочных машин | 1982 |
|
SU1092370A1 |
| Источник сейсмических сигналов ударного типа | 1983 |
|
SU1125568A1 |
I F.
JU
Ч
Фие.2
