Изобретение относится « области систем управления и может найти .применение в электромеханических системах автоматического управления с переменной стр:у1ктурой, например в следящих системах с электрогидравлическим приводом.
Известны системы автоматического управления с переменной структурой, содержащие ключевые элементы, соединенные электрически с логическими элемента.ми, .которые разрывают или восстанавливают каналы -передачи информации, т. е. изменяют структуру системы, в результате чего улучшается 1качество .процесса при выбранных допустимых значениях выходных параметров системы 1. Недостатком системы является малая точность и устойчивость системы управления.
Наиболее близкой ло технической сущности (К предлагаемой является система управления с .переменной структурой, которая содержит переключатель, соединенный с пропорциональным и дифференциальным блоками, последовательно соединенные -.первый усилитель и второй усилитель и последовательно соединенные гидроусилитель и гидропривод, выход которого соединен со входом первого усилителя 2. Недостатком системы является малая точность и устойчивость системы управления.
Цель изобретения - увеличение точности и устойчивости системы управления .путем исключения автоколебаний при переключении структуры.
Для этого система содержит реверсивную муфту, вхо.д которой соединен с выходом второго усилителя, выход - с входо.м гидроусилителя и входом первключателя, а выходы пропорционального и дифференциального
блоков соединены с входом второго усилителя.
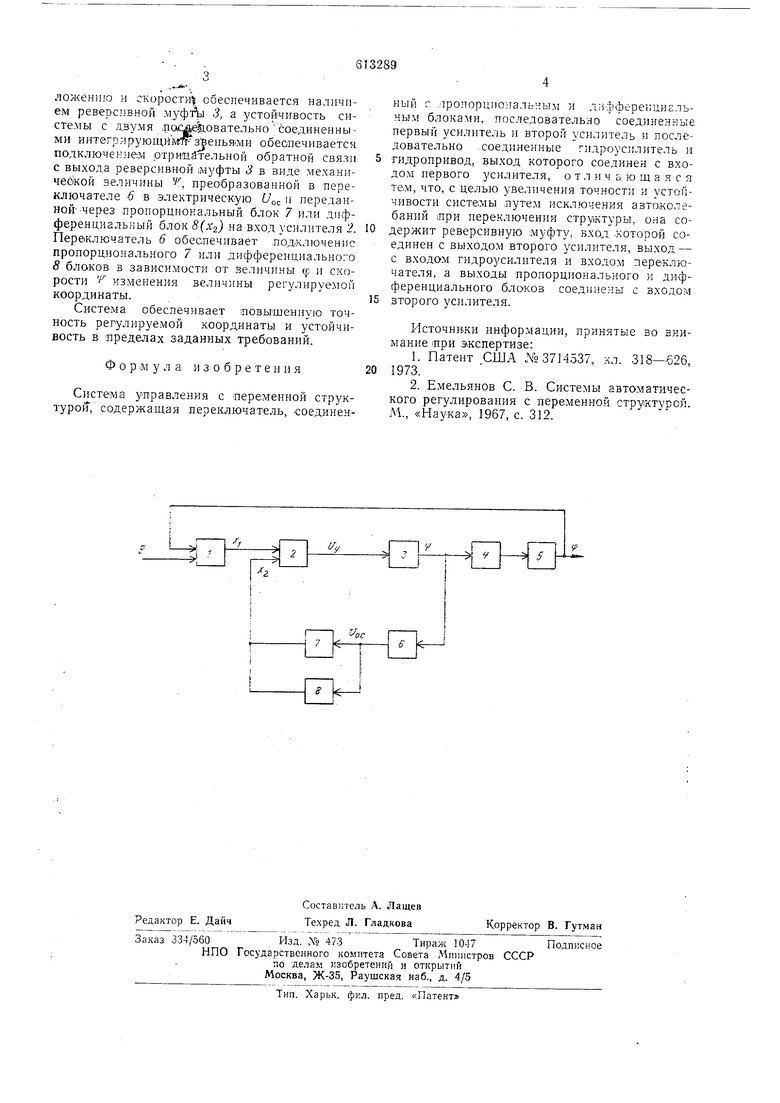
На чертеже представлена электрическая схема системы управления с переменной структурой.
Система управления с переменной структурой содержит первый усилитель /, второй усилитель 2, реверсивную муфту 3, гидравлический .усилитель 4, гидропривод 5, переключатель 6, пропорциональный блок 7 и дифференциальный бл-ок 8.
Регулируемая координата ф поступает на первый усилитель /, где она вычитается из задающего воздействия g. Ощибка Xi с выхода усилителя / .постлпает на второй усилитель
2, .который формирует сигнал U,,, управляющий реверсивной муфтой 3 (первым интегрирующим звеном), которая через гидроусилитель 4 управляет гидроприводом 5 (вторым интегрирующим звеном). Повыщение точности системы, т. е. и.сключение ощибки по положен11)о i скорости обеспечивается наличием реверсивной муфА 3, а устойчивость системы с двумя ,,овательносоединенными интегр:-1рующймж енья.ми обеспечивается подключением отрицательной обратной связи с выхода реверсивной муфты 3 в виде ме.ханичеокой величины , прео1бразованной в переключателе € в электрическую U и переданной- -через пропорциональный блок 7 или дп{|эференциалькый блок 8(х-2) на вход усилителя 2. Переключатель 6 обеспечивает .подключение пропорционального 7 нли дифференциального 8 блоков в зависимости от величины ф и скорости изменения величины регулируемой координаты.
Система обеспечивает повышенную точность регулируемой координаты и устойчивость в пределах заданных требований.
Формула изобретения
Система управления с переменной структурой, содержащая переключатель, соединенный с лропорцнональным и дифферепциальным блоками, последовательно соединен ые первый усилитель и второй усилитель и последовательно соединенные гидроусилитель и гидропривод, выход которого соединен с входом первого усилителя, отличающаяся тем, что, с целью увеличения точности и устойчивости системы .путем исключения автоколебаний 1при переключении структуры, она содержит реверсивную :муфту, вход .которой соединен с выходом второго усилителя, выход - с входом гидроусилителя и вхо.дом переключателя, а выходы пропорционального к дифференциального блоков соединены с входом второго усилителя.
Источни.ки информации, принятые во внимание при экспертизе:
1.Патент США №3714537, кл. 318-626, 1973.
2.Емельянов С. В. Системы авто.матического регулирования с переменной структурой. М., «Наука, 1967, с. 312.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИЙ МНОГОСТЕПЕННОЙ СТЕНД | 2006 |
|
RU2321073C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2010 |
|
RU2425257C1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2369893C1 |
| Установка для регулирования положения сооружений | 1991 |
|
SU1795000A1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| ГИДРОПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2006 |
|
RU2322618C1 |
| Автоматический регулятор | 1980 |
|
SU964580A1 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1680859A1 |
