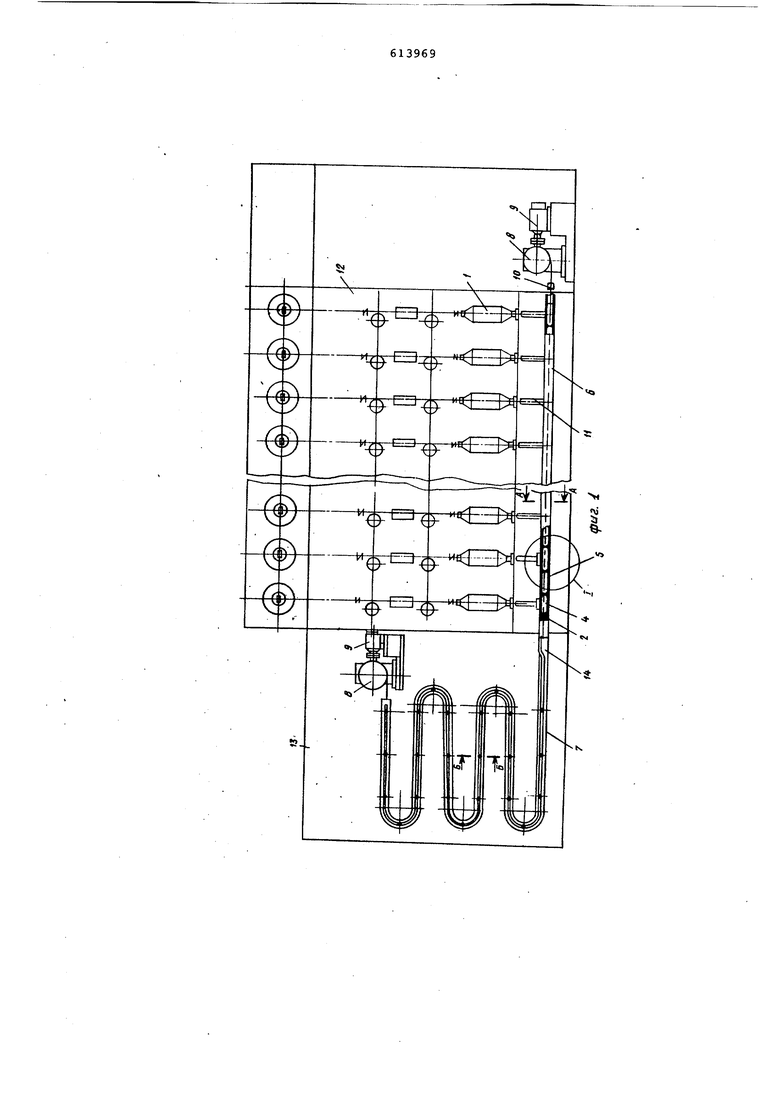
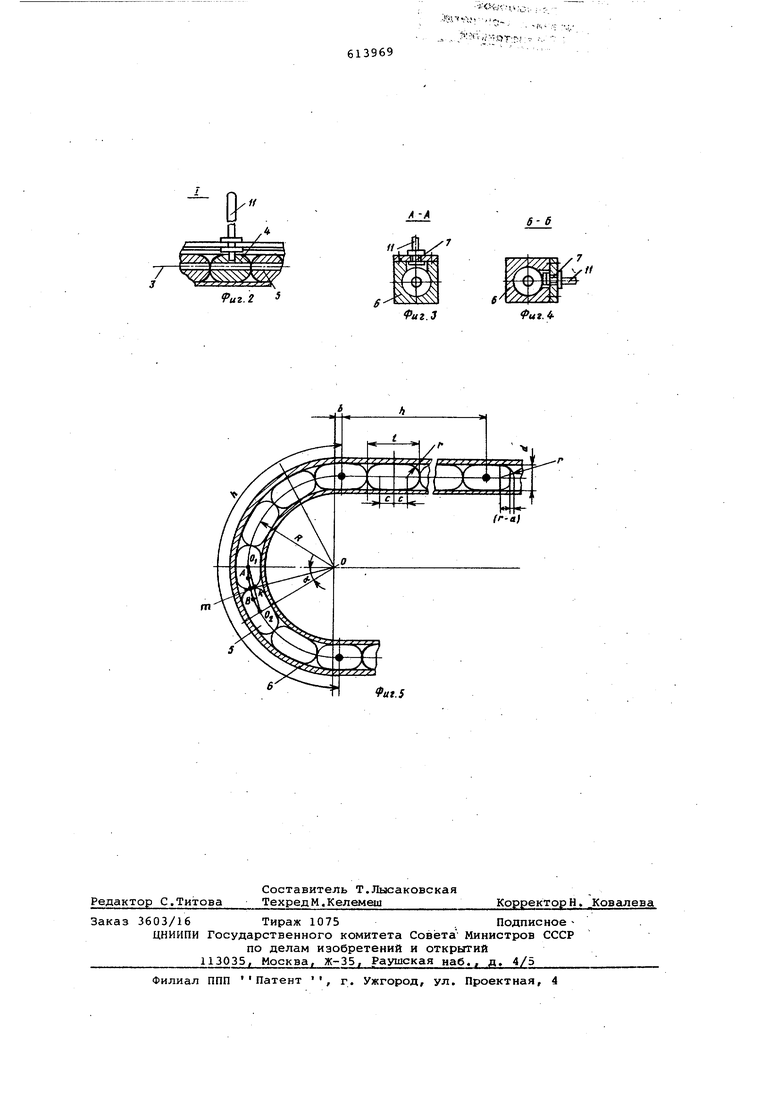
следовательно, и контакта их с внутрен ней поверхностью направляющей. Контакт трубки с поверхностью направляющей, а особенно возможность трубкой всей криволинейной внутренней поверхности переходного участка трассы, приводит также к заклиниванию приводного тягового органа на этом участке и повышенному износу трубок. Наличие заклиниЬания вызывает повышение нагрузки на ходовые элементы, а следовательно, и их быстрый износ, необходимость повыше.ния мощности привода, а также повышенную вытяжку троса Известно также грузонесущее устро ство, включающее приводной тяговый орган, выполенный в виде троса с расположенными на нем ходовыми и грузонесущими элементами и размещенный в направляющей с продольным пазом 2. Эта конструкция также не исключае заклинивание на криволинейных участка Трассы, особенно при малых радиусах кривизны переходных участков трассы. Цель изобретения - предотвращение заклинивания ходовых и грузонесущих элементов на переходных криволинейных участках трассы. Цель достигается тем, что ходовые и грузонесущие элементы имеют в сечении бочкообразную форму, при этом соотношение радиуса кривизны переходных участков и параметров ходовых грузоне сущих элементов связано следующими зависимостями: |..ие,г.(.-,,„,„. при Ъ о ircsiti 171 2 /dN2 t-arcsiti H(-2- (T) лп где Vj шаг между грузонесущими элементами;число элементов в шаге; длина элемента; радиус меньшей кривизны элемента;расстояние от оси симметрии элемента до центра меньшей кривизны; ширина элемента; радиус кривизны переходного криволинейного участка; разность между радиусом мень шей кривизны элемента и расстоянием от центра кривизны до торца; расстояние от -оси грузонесущего элемента до начала криволинейного участка. Ходовые и грузонесущие элементы могут быть выполнены из мягкого и износостойкого материала, например капролона. Таким образом, выполнение ходовьох элементов и дистанционных звеньев в форме бочек позволяет за счет снижения контактирующей поверхности каждой бочки с внутренней поверхностью направляющей, а следовательно, и повышения их относительной подвижности, исключить возможность заклинивания ходовых элементов и дистанционных звеньев на криволинейных участках трассы. 1Кроме того, выполнение элементов с криволинейными связующими зонами, |1озволяет сохранить шаг на криволинейных участках трассы и улучшить услория их прохождения. На фиг. 1 изображен узел транспортирования грузонесущих элементов, общий вид; на Фиг. 2 - узел I фиг. 1; , на фиг. 3 - разрез А-А фиг. 1; на фиг.4 - разрез Б-Б фиг. 1; на фиг.5положение элементов в момент прохождения криволинейных участков трассы. . Узел транспортирования грузов 1 содержит приводной тяговый орган 2, выполненный в виде троса 3, на который нанизаны ходовые элементы 4 и дистанционные звенья 5. Приводной тяговый орган 2установлен в направляющей 6 с продольным .пазом 7. Каждый конец троса 3 связан с барабаном 8 привода 9. На тросе 3 по обе стороны от всех ходовых элементов 4 и дистанционных звеньев 5 закреплены ограничители 10. На ходовых элементах 4 смонтированы грузонесущие элементы 11. Направляющая 6 размещена вдоль машины 12 и в шкафу перегрузки 13, причем на участке направляющей 6, расположенной вдоль машины 12, паз 7 выполнен в вертикальной плоскости, на направляющей, размещенной в шкафу перегрузки 13 - в горизонтальной плоскости. Участок направляющей 6 с вертикальным расположением продольного паза 7 связан с участком направляющей с горизонтальным расположением продольного паза 7 посредством переходника 14 с винтовЕлм пазом. Ходовые элементы 4 и дистанционные звенья 5 выполнены в форме бочек с криволинейными зонами, связывающими их поверхность с торцами. При выполнении ходовых элементов 4 и дистанционных звеньев 5 в форме бо- чек равной длины соотношение параметров этих бочек и радиуса кривизны переходного криволинейного участка трассы 14 могут быть выражены следующими зависимостями. lien + 2Ь илинЕ 1ГЯ +2Ь / откудаТ нg-ab/IT; , учитывая, (г-01) ()-2Ь (с4(к-а)1-Ь „ ИЛИ о приЪ о, , .ЕсЧ-аЦ , , It . 06 О.К п 2 R L OjXO Acosy+Am-ccos +e, iWW эллипса с i I 11 где It - шаг между грузонесущими элеме тами; 2 - длина элемента; К - число элементов в шаге; р - радиус меньшей кривизны элемента;С - расстояние от центра элемента до центра меньшей кривизны; d - ширина элемента; 1 - радиус кривизны переходного ; криволинейного участка; а - разность между радиусом мень.шей кривизны элемента и расст янием от центра кривизны этой зоны до торца; Ь- расстояние от оси грузонесуще го элемента паков.кодержателя до начала криволинейного учас ка. Готовые грузы одновременно снимают со всех рабочих мест машины и устанавливают на грузонесущие элементы 11 при водного тягового органа 2, причем грузонесущие элементы 11 размещены строго напротив рабочих мест машины 12 и с тем же шагом. После установки грузов 1 на грузонесущие элементы 11 включают привод 9, размещенный в шкафу перегру ки 13. При вращении барабана 8, трос наматывается на него и посредством ограничителя 10 перемещает ходовые элементы 4 с грузонесущими элементами 11 и дистанционные звенья 5 по направляющей 6. При прохождении грузонесущих элементов 11 переходника 14 они совместно с грузами 1 переходят из верти кального положения в горизонтальное и далее перемещаются по направляющей 6 шкафа перегрузки 13 до конца паза 7 Грузонесущие элементы 11 размещаются горизонтальными рядами так, что они одновременно находятся на общих вертикальных прямых, проходящих через грузонесущие элементы 11. Затем грузы 1 перегружают на транспортное средство (на фиг. не показано) , а грузонесущие лементы 11 возвращают посредством торого барабана 8, связанного со свом приводом 9 в исходное положение. Формула изобретения 1. Грузонесущее устройство, вклюающее приводной тяговый орган, выполенный в виде троса с расположенными а нем ходовыми и грузонесущими элеентами и размещенный в направляющей продольным пазом, отличающеся тем, что, с целью предотвращения аклинивания ходовых и грузонесущих лементов на переходных - криволинейных частках трассы, ходовые и грузонесуие элементы имеют в сечейии бочкообазную форму, при этом соотношение раиуса кривизны переходных участков и араметров ходовых и грузонесущих элеентов связано следующими завидимостяh «B;b2tc4(P-all:i / де h - шаг между грузонесущими элементами;-число элементов в шаге; -длина элемента; } - радиус меньшей кривизны элемента ; С - расстояние от оси симметрии элемента до центра меньшей кривизны; d - ширина элемента; радиус кривизны переходного криволинейного участка; разность между радиусом меньшей кривизны элемента и расстоянием от центра кривизны до расстояние от оси грузонесущего элемента до начала криволинейного участка. 2. Устройство по п. 1, отличающееся тем, что ходовые и грузонесущие элементы выполнены из мягкого и износостойкого материала, например капролона. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 361942, кл. В 65 q 17/20, 1968. 2.Заявка № 2090317/29-03, кл. В 65 Q 17/38, 1974, по которой принято решение о выдаче авторского свидетельства.
-Ofer-l,i;o;- :.- m-fV --,.
., , ,-- ЬГ-аТ:Г:Г-- --
613969
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования | 1976 |
|
SU603619A1 |
| Конвейерная система | 1970 |
|
SU472073A1 |
| ПРОСТРАНСТВЕННАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1991 |
|
RU2030341C1 |
| Конвейерная система | 1976 |
|
SU716914A2 |
| ТРУБЧАТЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 1999 |
|
RU2170202C2 |
| КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2001 |
|
RU2206486C1 |
| КОВШОВЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР С УВЕЛИЧЕННОЙ ВМЕСТИМОСТЬЮ КОВШЕЙ | 2011 |
|
RU2478550C1 |
| ПОДВЕСНОЙ КОНВЕЙЕР | 1973 |
|
SU361942A1 |
| Конвейерный поезд | 1981 |
|
SU1023111A1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
Л /
.г 5
A-A
6-6
fut.5
