(54) КОНВЕЙЕРНАЯ СИСТЕМА

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННАЯ КОНВЕЙЕРНАЯ СИСТЕМА | 1991 |
|
RU2030341C1 |
| Конвейерная система | 1970 |
|
SU472073A1 |
| Конвейерная система | 1985 |
|
SU1283171A1 |
| Пространственная транспортная система | 1979 |
|
SU865726A1 |
| Пространственная транспортная система | 1977 |
|
SU716917A1 |
| Подвесной конвейер для транспортирования длинномерных грузов | 1971 |
|
SU449857A1 |
| КАРКАСНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2001 |
|
RU2232707C2 |
| КОНВЕЙЕРНЫЙ ПИТАТЕЛЬ АРТИЛЛЕРИЙСКОГО АВТОМАТА КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2018 |
|
RU2694485C1 |
| ПОДВЕСНОЙ ГРУЗОНЕСУЩИЙ КОНВЕЙЕР | 1992 |
|
RU2012520C1 |
| Вертикальная конвейерная система для штучных грузов | 1985 |
|
SU1680599A1 |



1
Изобретение относится к промыш ленному транспорту, а именно к конвейерным системам.
По основному авт.св. № 47207.3 известна конвейерная система с имеюмая ходовой путь и грузонесущие элементы, перемещаемые по ходовому пути при помощи приводного тягового органа, проходящего через грузонесущие элементы, выполненные в виде кареток с отверстиями для троса и дистанционные трубк снабженные по концам сферическими насадками, взаимодействующими со сферическими втулками,расположенными в осях кареток, при этом система имеет прижим ветви привода к 1каткам 1,
Недостатком такой конвейерной системы является ограниченная область применения и ненадежность в работе.
Цель изобретения - расширение области применения и повышения надежности в работе.
Это достигается тем, что каретка грузонесущего элемента оснащена дополнительно парой катков и смойтированными в обоймах направляющими роликами, которые установлены вдереди и сзади катков, а прижим ветвипрлвода к каткам выполнен в виде подпружиненной самоустанавливающей плиты, футерованной антифрикционным материалом снизу.
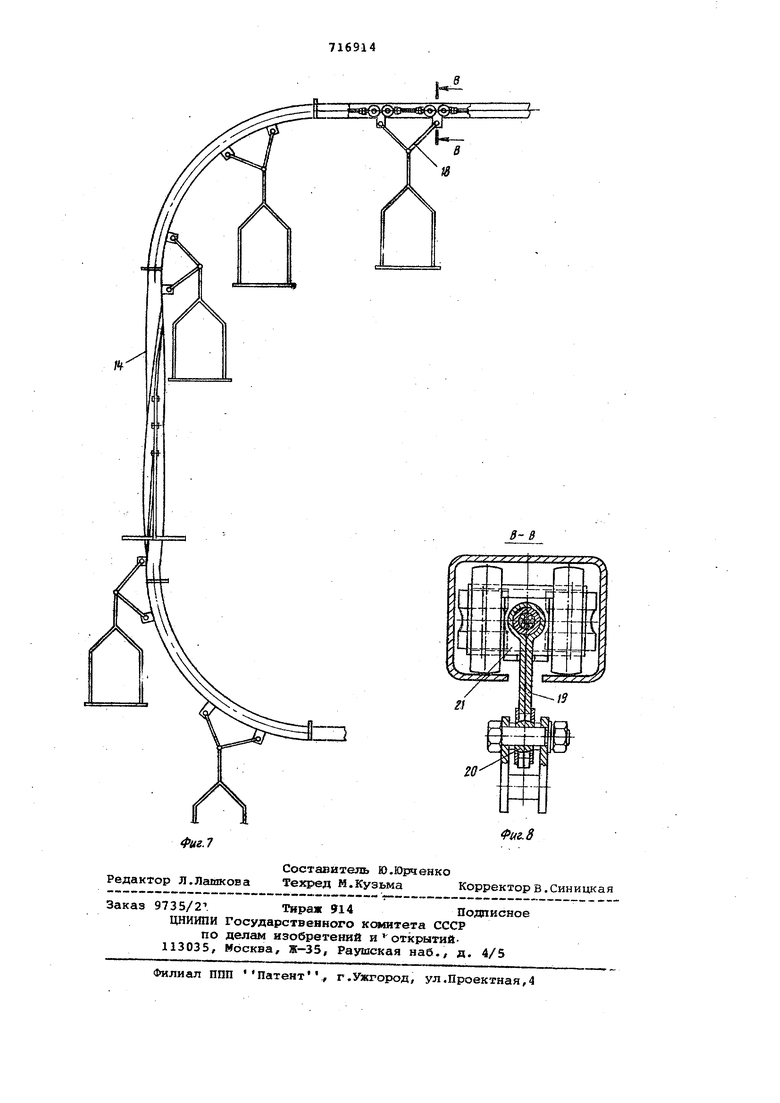
На фиг. I показан .прямолинейный участок трассы с ходовым составом; на фиг. 2 - фрикционный привод; на фиг. 3 - каретка ходового состава; на фиг. 4 - то же, вид сверху; на фиг 5 - разрез А-А на фиг. 3; на фиг. 6 - разрез Б-Б на фиг. 2; на фиг. 7 - участок трассы с вертикальной винтовой секцией;, на фиг. 8 - , разрез В-В на фиг. 7 . . .
Ходовой состав собран иэ кареток 1 и промежуточных звеньев 2 с помощью ;сво6одно пропущенного через них тягового троса 3. Концы троса заделаны в зажимах 4. Необходимая жесткость ходового состава обеспечивается винTOBbEvm растяжками 5. Каретка 1 состои из трубчатого несущего звена б со сферическими головками 7 по концам и собранными на нем осями 8 с тяговоходовыми катками 9, обоймами 10 с направляющими роликами 11 и грузовой серьгой 12. Для компенсации неровностей ходового пути 13 и возможности движения по винтовым участкам 14 пространственной трассы конвейера все элементы каретки собрана на несущем элементе 6 с возможностью радиального пбворота. Поворот обоймы 10 относительно оси 8 происходит в пределах зазора 15. Промежуточные элементы 2 выполнены в виде трубчатык . звеньев с гнездами, имеющих сферическую поверхность 16 по торцам.
Транспортируемый груз подвешивается на грузовой серьге 12 или на траверсе 17, которая подвешивается на двух грузовых серьгах 12. Натрассах с вертикальным винтовым участком груз подвешивается на кронштейне 18, сое- диненном с двумя удлиненными грузовыми серьгс1МИ 19 с помощью сферических шарниров 20, а грузовая серьга 19 при этом фиксируется на одной из осей тягово-ходовых катков с помощью поводко вой вилки 21,
Линейные фрикционные приводы конвейерной системы выполнены в виде рамы 22, закрепленной на секции ходового пути 23 с установленньпу5и На ней приводной 24 и натяжной 25 звездочками с тяговой цепью 26.
Тяговая цепь оснащена звеньяглиобоймами 27, имеющими плоские упругие фрикционные элементы 28, взаимодействующие с тягово-ходовыми катками У. Для передачи тягового уси.лия цепи 26 ходовому составу звенья-обоймы 27 прижимаются к каткам ,3 плитой 29, футерованной снизу антифрикционным материалом 30. Плита установлена на раме 22 с возможностью качания вокруг оси 31 в одном направлении, и в месте с осью 31 и ползунами 32 в другом направлении. Прижим плиты к каткам осуществляется с помощ1.ю болта 33 через упругий аккумулирующий элемент 34.
Секция ходового пути 23 футерована фрикционными дорожками 35.
Конвейерная система работает следующим образом.
, При движении ходового состава по вертикальному винтовому участку трассы конвейера обоймы 10с направляющими роликами 11 поворачиваются на несущем звене б в месте с осями 8 катков 9. Постоянный контакт направляющих роликов 11 с боковыми стенками ходового пути 13 обеспечивается
возможностью покачивания обойглы .О относительно оси 8 в пределах зазора 15, Сферические гнезда промежуточных элементов 2 в контакте со сферичб;скими головками 7 кареток образуют униJ. версальный шарнир, обеспечивающий возможность движения по кривым горизонтального и вертикального поворота трассы конвейера.
Прижим плиты 29 к каткам 9 произ„ водится с помощью болта 33 через упругий элемент 34. При этом плита имеет возможность качания вокруг оси 3 в одном .направлении и в месте; с осью 31 и ползунами 32 - в другом направлении, т.е. она самоустанав5 ливаатся, что обеспечивает равномерное распределение усилия прижима на все катки ходового состава, взаимодействую цие с приводои конвейерной систамы.
Выполнение ходового состава с двумя парами тягово-ходовых катков и направляющих .роликов, имеющих возможность радиального поворота, обеспечивает надежную работу ходовых составов на любых участках трассы конвейера, включая вертикальные винтовые подъемы и спуски.
Формула изобретения
Конвейерная система по авт.ев« № 472073, о тли ч аюш а я с я с тем, что, с целью расширения области Применения и повышения надежности в , работе, каретка грузонесущего элемента оснащена дополнительно парой катков и смонтированными в обоймах направляющими роликагди, которые установлены впереди и сзади катков, а прижим ветви привода к каткам выполнен 3 виде подпружиненной самоьст.анавливакщей пдшты футерованной антифрикционным материалом снизу.
Источники информации, принятые во внимание при экспертизе
.i,
i«
. г п W 15 Фиъ.
21
гб 6-5
zs
