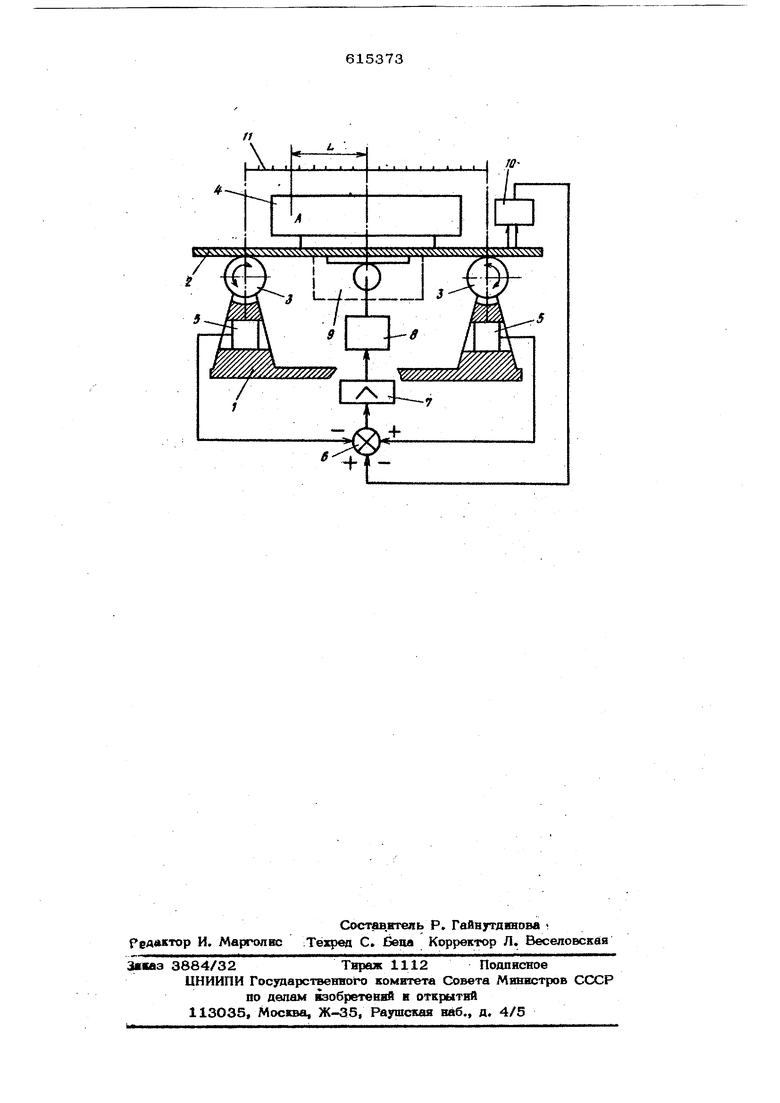
Иэвество устройство для Ьпредепенаа координат центра тяядасти взделия, состою, яшее из рамы,-уста новпевной яа опорах. с возможностью поворота, силоизмёрятельных датчиков, расположенных в опорах рамы механизма поворота рамы, в апемевтов фиюсацйи lj. У Чакого устройства низкая производитеяьшють, встедстаие больших габаритов а , л перемещение рамы с изделием и ее фиксирование в заданном положении осуществ119ет я механическими средства- ми; ; : .- : . , :-:..:.. Нав&мее бяаоким по технической суш«ности к преяяагаемому является устройсяво ддя опреяеяеиия положен вя центра жести кздэпия, содержащее основание с двумя (шорами, 1татфо{ у, установленную; на опорвЖс возможностью перемещения в ншфавпенви; пароплелышм основанию, и два сиповзмеритецьных датчика, размещенных в каждой опоре 2. OniBum для определений координат.ден ре изделия платформа перемещается механическими средствами, что сни жает производительность и точность изме1рения. ,, , Цель изобретения - повышение точности измерения и производительности. Эта цель достигается тем, что предла гаемое устройство снабжено приводом платформы, сумматором, вход которого соединен с выходом датчиков, исполнителе ;шым мехаиазмом, вход которого соединен С выходом сумматора,;а выход кинематически связан с приводом , компеисатором веса платформы, выполненным в виде потешхиометра, скользящий контакт которого связан с поверхностью платформы, а выход его соединен с входом сум матора. На чертеже изображена схема описываввмого устройства. Устройство содержит основание 1, плат форму 2, установленную на опорах 3, выполненных в виде котлов, с возможностью перемещения в направления, параллельном основанию. На платформе устанавливают изделие 4. Давление, испытываемое опорами, преобразуется в электрический сигнал с помощью сипоизмерительных датчиков 5, размешенных в каждой опоре 3. Датчики 5 выходом подключены к входу сумматора 6 в противофазе. Сумматор 6 является входом электронного уснлителя 7, выход которого связан с входом исполнительного механизм 8, выход которого кинематически связан с прийодЬм 9 платформы 2. Для устране,Чр1 влияния веса платформы на точность измерения устройство содержит компенсатор 10 веса платформы, выполненный в виде потенциометра, скользжций контакт которого связан с поверхностью платформы 2, выход потенциометра соединен с входом сумматоров, а корпус компенсатора связан с основанием 1. На основания 1установлена неподвижная отсчетная шка ла 11, начало координат которой помешено в точку, соответствующую устойчиво му положению устройства,/ Устройство работает следующим образом. При размещении испытываемого изделн 4 на ппатформе 2 на вход усилителя 7 поступает разностный сигнал с датчиков 5 обусловленный смешением положения центра тяжести изделия относительно положения j устойчивого равновесия. Исполнительный механизм 8 обрабатывает этот , ; :игнал и через электропривод 9 воздейст вует на положение платформы 2. При сов 1ещенйв линия центра тяжести с нулем неподвижной шкалы 11 сигналы с датчиков 5 ypasHHBiEUOTca и на выходе усилителя 7 свгная отсутствует - движение пре кращается. От91осительно выбранной точки А на изделии снимают размеры . Ме няя ориентаивоо изделия, можно определиг положенве центра тяжести изделия путем переоэчевкя лвпйй центра тяжести в разных шюспхггах. На сумматор 6 с датчЕЕков S поступают сигвалы, которые являются суммой сигналов от воздействия ве са платформы в изделия. Свгвая от воздействия веса платформы 2 1апяется паразитШ(м в этом усгройстве Его компенсация осуществляется с помощью компенсатора 10, который измеряет величину воздействия веса платформы 2 на опору 3 по перемещению центра тяжести самой платформы 2 относительно нуле вого положения неподвижной шкалы 11. Сигнал, пропорциональный перемещению платфорлды 2 относительно нуля неподвиж ной шкалы 11 со. знаком, противоположным разности сигналов, снимаемых с дат чиков 5, поступает на вход сумматора б, тем самым устраняя паразитный сигнал. За счет применения электрических блоков автоматически реагирующих на изменение ;положения центра тяжести изделия н автог матически перемещающих платформу с изделием в положение равновесия, устройс1 во обладает высокой точностью измерений 1и производительностью. Формула изобретения Устройство для определения положения центра тяжести изделия, содержащее ocHOh вание с двумя опорами, платформу, установленную на опорах с возможностью перемещения в направлении, параллельном основанию, и два сило измерительных датч чика, размещенных в.каждой опоре, о тл и4 а ю щ её с я тем, что, с целью повышения точности измерения я производя- Стельности, оно снабжено приводом платформы, сумматором, вход которого соединен с выходом датчиков, исполнительным механизмом, вход которого соединен с выходом сумматора, а выход кинематически связан с приводом платформы компенсато ром веса платфоргъ ы выполненным в виде потенциометра, скользящий контакт которого связан с поверхш)стью Ш1атфо|мы, а выход его соединен с,входом сумматор Источники информшхии, принятые во внимание приЭкспертизе; 1.Авторское свндетельство СССР № 232570, та. а О1 М 1/12, 1969. 2.Авторское свидетельство СССР ;№ 338804, кл. СЮ1 М 1/12, 1962.
lAJ .J
7 .
Л7
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2004 |
|
RU2262915C1 |
| Балансированное устройство | 1979 |
|
SU832375A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Устройство для автоматического взве-шиВАНия и пОРциОННОгО дОзиРОВАНия | 1979 |
|
SU807068A1 |
| СИСТЕМА ДЛЯ ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163024C2 |
| Весоизмерительное устройство | 1986 |
|
SU1315824A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| СПРЕДЕР НАКЛОННЫЙ ДЛЯ КОНТЕЙНЕРОВ | 2017 |
|
RU2667206C1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |