Известны системы управления силовым гидравлическим приводом судового руля, включающие в себя задатчик курса, датчик величины смещения управляющего органа гидравлического привода руля, устройство для ручной дистанционной передачи управляющих сигналов, авторулевого с дифференцирующим и интегрирующим устройствами, а также усилитель управляющих сигналов и устройство обратной связи.
Отличительная особенность описываемой системы состоит в том, что сельсин-датчик главной обратной связи электрически подключен на вход усилителя сигналов, а к выходу усилителя сигналов присоединен исполнительный электродвигатель, ротор которого через электромагнитную муфту кинематически связан с нулевым установителем и управляющим органом привода руля.
Такая конструкция системы проще. Кроме того, повышается ее надежность, а также точность установки руля в заданное положение.
Особенность системы состоит также в том, что она имеет ручное кнопочное устройство непосредственного включения исполнительного электродвигателя. Это дает возможность устанавливать руль в заданное положение, например в случае выхода из строя усилителя сигналов.
рекладки руля система снабжена устройством для включения электромагнитной муфты. Оно выполнено в виде кулачково-контактного приспособления, кулачки которого кинематически связаны с баллером руля, а контакты
электрически соединяют электромагнитную
муфту с источником опорного напряжения
через фазочувствительный выпрямитель.
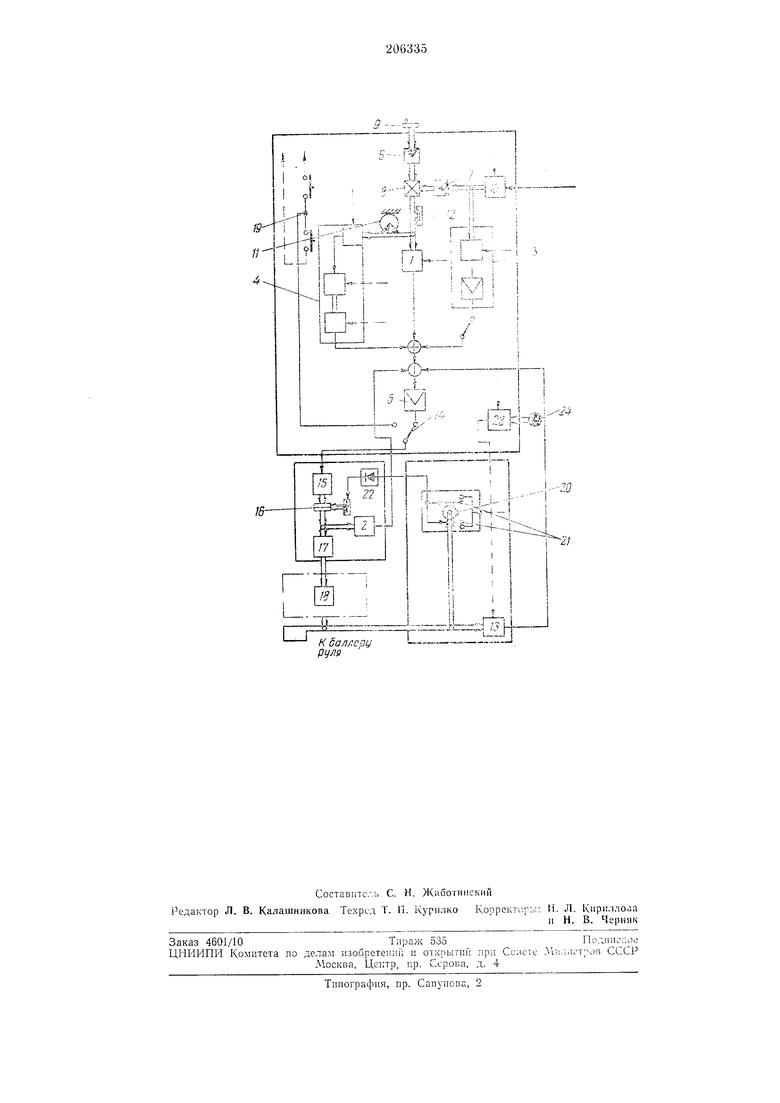
Па чертел е представлена схема системы
управления силовым гидравлическим приводом судового руля.
Задатчик курса /, датчик 2 величины смещения управляющего органа гидравлического привода руля, а также дифференциальное
3 и интегрирующее 4 устройства авторулевого подключены на вход усилителя 5 управляющих сигналов. С задатчиком курса через червячные передачи 6 и 7 и дифференциал 8 кинематически связаны штурвал 9 устройства для ручной дистанционной передачи управляющих сигналов и сельсин 10 - принимающий курса, например от гирокомпаса. С задатчиком курса кииематически связаны также дифференциальное и интегрирующее устройства, шкала 11 и ограничитель ввода 12.
Па вход усилителя управляющих сигналов подключен сельсин-датчик главной обратной связи 13, а к выходу усилителя через переключатель 14 присоединен исполнительный
связан с нулевым установителем 17 и управляющим органом 18 нрНБОда руля.
К тому же переключателю подключено кноночное устройство 19, при помощи которого можно передать напряжение пепосредетвенно на иснолннтельный двигатель, минуя уснлитель.
Электромагнитная муфта для ограничения угла нерекладки руля может быть вк;почеиа также прн помощи кулачково-контактного прнсноеобления, кулачки 20 которого кинематически связаны с баллером руля, а контакты 21 подключены к иеточ;пп у опорного напряжения. Муфта включаетея через фазочувствнтельный вынрямнтель 22.
Велнчнпа отрицательной обратной связи может быть изменена через сельсин 23 прн помощи рукояткн 24.
При повороте штурвала .9 пли прини.мающего курса 10 дифференциал 8 разворачивает от нулевого положения задатчик курса 1 напряжение с которого, пропорциопальпое заданному курсу, поступает па вход усилителя 5 сигналов, уеилнвает и управляет угловой скоростью электродвигателя 15. Ротор электродвигателя через электромагнитную муфту 16 разворачивает датчик 2 до тех нор, пока на входе усилптеля разность нанряжений задатчика курса н датчика 2 не уменьшится до такой величины, которая носле усилення не еможет создать на роторе двигателя 15 момент, достаточный для его новорота. Двигатель оетанавлнвается. Одновремеппо с ротором двнгателя смещается и останавлпвается пулевой установитель 17 н управляющий орган 18 гидравлического привода. Так как уцравляюн 1,ий орган привода смещен от нулевого ноложения, то привод перекладывает руль. Прн этом разворачивается датчик 13, напряженне с которого на вход уенлнтеля 5 поступает в такой фазе, что двнгатель поворачивает управляющий орган /6 и датчик 2 к нулеволгу ноложенню. Двигатель оетановится тогда, когда напряжения на входе уеилителя от задатчика курса / и датчика 13 скомценсируются, а напряженне от датчика 2 будет равным нулю. Унравляющнй орган 18 к этому моменту придет в нулевое ноложение, а перекладка руля прекратнтея на угле, пропорциональном углу поворота штурвала или припимающего курса.
Угол задания на перекладку отечитывается по шкале 11. Коэффициент проиорциональности между утлом поворота штурвала пли принимающего курса может нропзвольно изменяться путем изменения величины нанряжения датчика 13 с номощью сельс}ша 23 рукояткой 24.
Если руль заложен указанным выше епособом, то судно будет разворачиваться до тех нор, пока припимающий курса не вернет руль к нулевому положепню. Днфференцнрующее устройство служит для одерживания судна, а интегрирующее устройство 4 - для ко: пенсации неравномерноети рыскаппя. Паиряжеппе с их выходов поступает на вход уеилителя 5 н вызывает дополн;гтельную закладку руля до тех пор, ( ж-пряжение это )ie бу;ieT скомиенсировапо д.атчикол 13. При 1зыходе из строя усилителя 5 или датчиков /, 2 двигатель 15 при помощи переключателя 4 подклю ча.ют к кнопочному устройству 19, с номоныс; которого вручную мсзжтго под.ать необходимьп сигнал на емещепие правляюп1,его органа 18 гидравлического П1)ивод;1 руля.
Еелп па обмот1 у двигателя 15 папряжепие от кноночпого ycTpoiicTBa пли от }-еи;1ителя будет подаватьея и в тот люмепт, ;огда руль
переложен до задаппого положения, то кулачко:т 20 замкнется один из контактов 21 ку.ьччково-коптактного устроГСтва. При этом напряжение на л.вигателе алгебраически сложится с опорным напряжением и 5аи)яжениГ1
от выпрямителя 22 поступит на электромагнитную муфту 16. В этом случае муфта отсоединит дви1ате: ь от управля1ощего органа и пулево1о установителя, пулевой установ1ггель вернет унравляющий орган в нулсчюе положе1П1е, п перекладка руля прекратится.
П р е д м с т н 3 о б р е т е н н я
1.Спстема управления си;1овым г))драв,1ическим приводом судового руля, вк.1ючающая
в себя задатчик курса, ве.шчины с.меП1,еппя управляющего органа гидравлического привода руля, уетройство для ручной дистанцпоппой передачи управляющих сигналов, авторулевого е дифференцирующие и интегрирующим устройствами, а также усилитель управляющих сигналов п устройство обратной связи, отличающаяся тем, что, с целью упрощения конструкции, повышения надежности
енстемы и точностн установкн руля в заданное положение, сельепн-датчик главной обратной связи электрически нодключен на вход усилителя сигналов, а к выходу усплптеля eniналов приеоед;п-1еп пснолннтельный электродвпгатель, ротор которого через э.тектромагплпч-р.чо муфту кинематичеекп связап с Н)мевым установителем п управляюни1м органом нрнвода руля.
2.Система по п. 1, отличающаяся тем, что. с нефтью обеспечения установкн руля в заданное ноложение, например, в елучае выхода пз строя успл ггеля снгпалов, она имеет ручное кноночное устройство непосредственного включення исполнительного злектродвнгате-чя3.Сиетема но н. 1, отличающаяся тем, что, с целью автоматнчеекого ограннчения угла нерекладки руля, она снабжена устройством для включения электромагннтно муфты, выполненным в внде кулачково-контактного нрпспособлення, ку.чачки которого кинематнческп связаны с баллером руля, а контакты электрически соедгн-1яют электромагнитную муфту с источником опорного нанряженпя через фаКбаллеоаруля
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВОЙ АВТОРУЛЕВОЙ | 1972 |
|
SU337300A1 |
| Авторулевой | 1988 |
|
SU1579851A1 |
| Авторулевой | 1988 |
|
SU1527092A1 |
| Система управления курсом судна | 1983 |
|
SU1131772A1 |
| Система управления электрогидравлической рулевой машиной | 1973 |
|
SU483305A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Авторулевой | 1988 |
|
SU1625780A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Судовой авторулевой | 1982 |
|
SU1017594A1 |
| АВТОРУЛЕВОЙ, РЕАЛИЗУЮЩИЙ ПРОПОРЦИОНАЛЬНО- ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ ЗАКОН УПРАВЛЕНИЯ | 1968 |
|
SU213943A1 |