(54) МЕХАНИЗМ ШАГОВОЙ ПОДАЧИ КАРЕТКИ КОПИРОВАЛЬНО-ФРЕЗЕРНОГО СТАНКА
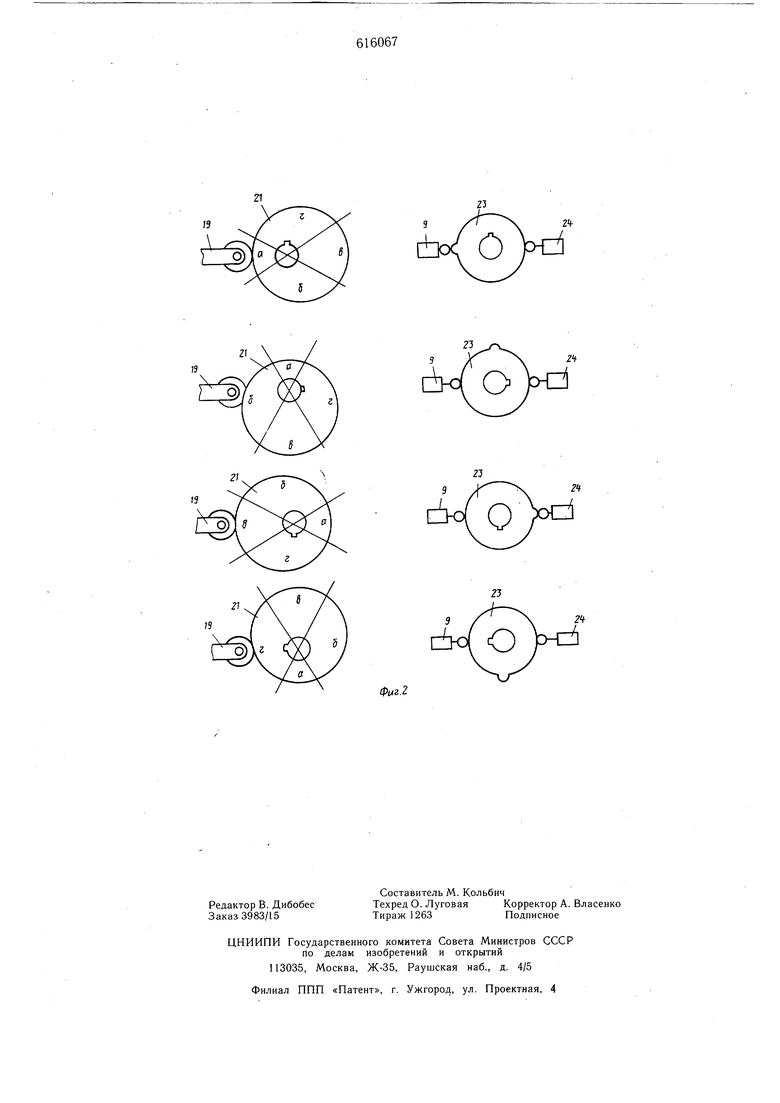
ся на его торце роликом 20, посредством которого ползун опирается на кулачок 21. Во избежание вредного воздействия на точность шага инерционных сил движущихся масс и времени срабатывания электромуфт кулачок 21 спрофилирован и расположен на валу редуктора 22 так, что включение и отключение ходового винта происходит тогда, когда ролик 20 ползуна 19 находится в пределах участка «а (ближнего - стояния) или - «в (дальнего стояния) кулачка 21 (фиг. 2), т. е. когда ползун 19 неподвижен, поскольку участки «а и «в представляют собой части окружностей.
К кулачку 23, также закрепленному на валу редуктора 22, подведены микропереключатели 9 и 24, связанные с электромуфтами 7 и 8 и электродвигателем 25. Кроме того, микропереключатель 9 связан с микропереключателем 6.
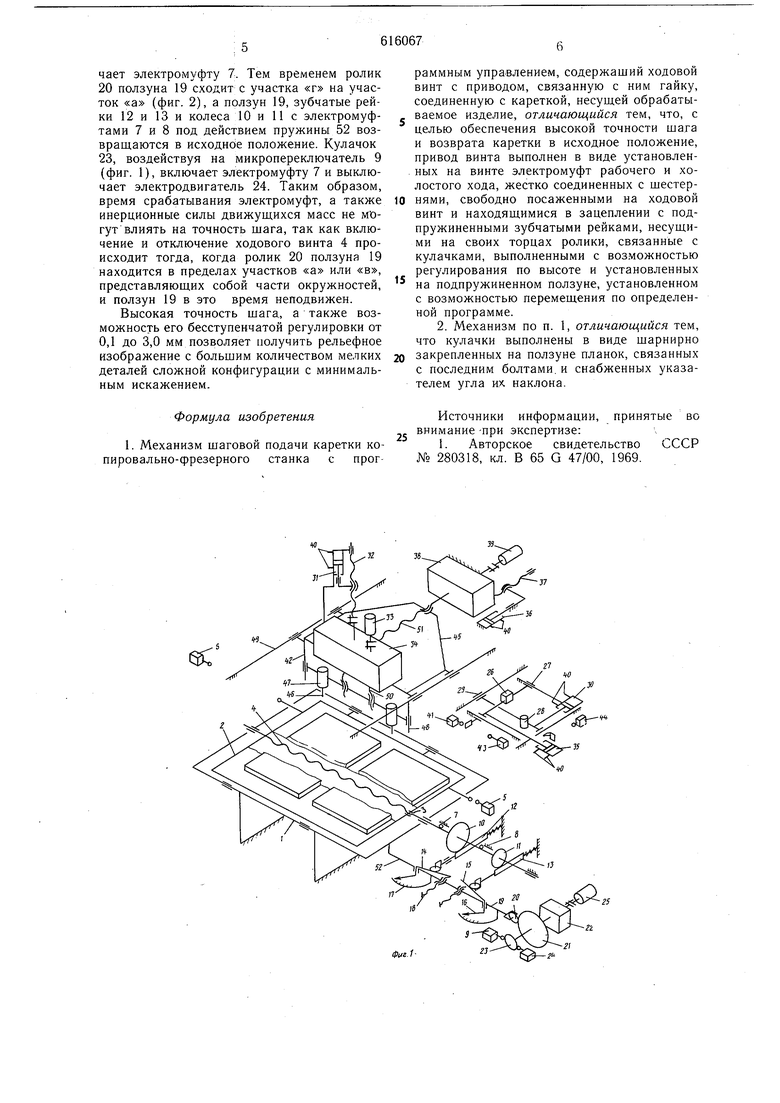
Ввиду того, что в основу станка заложен принцип считывания программы с фотопленки с использованием фотокопировальной системы, от которой зависит режим работы механизма шаговой подачи, последний изображен на фиг. 1 вместе с станком. Фотоголовка 26 следящей системы, закрепленная на каретке 27, воспринимает световые сигналы фотопроектора 28, смонтированного на салазках 29. Гидроцилинидр 30, перемещающий салазки 29 с фотопроектором 28, приводится в действи.е гидроцилиндром 31, связанным через винтовую пару 32 с электродвигателем 33 через редуктор 34. А гидроцилиндр 35, перемещающий каретку 27 с фотоголовкой 26, приводится в действие гидроцилиндром 36, связанным через винтовую пару 37 и редуктор 38 с электродвигателем 39. Гидроци линлры связаны системой шлангов 40. Микропереключатель 41 служит для отключени я электродвигателя 33 при остановке траверсы 42 в крайнем верхнем положении, а салазок 29 - в крайнем начальном положении.
Микропереключатели 43 и 44 служат для реверсирования электродвигателя 39 при возврате в исходное положение кареток 45 и 27 по окончании рабочего хода и выключения электродвигателя 39 в конце холостого хода. Кроме того, микропереключатель 41 связан электродвигателем 25 механизма щаговой подачи.
Движение фрез 46, закрепленных в щпинделях 47, складывается из возвратно-поступательного движения траверсы 42 в направляющих- 48 и движения каретки 45 вдоль направляющих 49.
Траверса 42 приводится в движение винтами 50, вращаемыми электродвигателями 33 через редуктор 34. Каретка 45 редуктора 34 проводится в движение винтом 51, вращение которому передается от электро
двигателя 39 через редуктор 38.
Микропереключатель 44 (фиг. 1) реверсирует электродвигатель 39. Каретка 45 возвращается в исходное положение. Одновременно включается электродвигатель 25 и кулачок 21 начинает вращаться. Ролик 20 ползуна 19, опирающийся ранее о поверхность «а кулачка 21, переходит на участок «б (фиг. 2).
Ползун 19 перемещается и кулачок 14 сдвигает подпружиненную зубчатую рейку 12 вдоль направляющих, - движение передается колесу 10 и через включенную электро0 муфту 7 - винту 4. Каретка 2 с изделием перемещается на один шаг, величина которого зависит от высоты подъема кулачка 14. При дальнейшем вращении кулачка 21 (фиг. 2) ролик ползуна 19 переходит на участок «в, который так же, как и участок
5 «а представляет собой часть окружности. Одновременно кулачок 23 действует на микропереключатель 24, связанный с электромуфтой 7, и отключает ее. Ролик переходит на участок «г (фиг. 2). При движении ро- лика по участку .«г ползун 19, зубчатые рейки 12 и 13 и колеса 10 и 11 с электромуфтами 7 и 8 под действием пружин 52 возвращается в исходное положение, а винт 4 каретки 2 и две другие электромуфты 7 и 8, жестко сидящие на винте 4. непод5 вижны.
Ролик 20 ползуна 19 сходит с участка «г на участок «а,, а кулачок 23 действуя на микропереключатель 9 (фиг. 2), выключает двигатель 25 и включает электромуфту 7, после чего по команде микропёреключателя 41 включается электродвигатель 25, и каретка 2 перемещается еще на один шаг и так до тех пор, пока не упрется в микропереключатель 6, которым блокируется микропереключатель 9. Тем временем ролик 20
5 ползуна 19 переходит с участка «б на участок «в, а кулачок 23, воздействуя на микропереключатель 24 (фиг. 2), отключает электромуфту 7. Далее ролик переходит с участка «в на участок «г кулачка 21 (фиг. 2), и ползун 19, зубчатые рейки 12 и 13,.зубчатые колеса 10 и 11 с электромуфтами 7 и 8 возвращаются в исходное положение.
При дальнейщем вращении кулачка 21 ролик ползуна 19 переходит с участка «г на участок «а, а кулачок 23 воздействует
5 на микропереключатель 9 (фиг. 2), блокированный микропереключателем 6 так, что вместо электромуфты 7 он включает электромуфту 8. Одновременно с этим фотоголовка 26 фотокопировальной системы останавливается. При переходе ролика ползуна 19 с
0 участка «а на участок «б (фиг. 2) начинается обратный ход каретки 2. Микропереключатель 9 блокирован и в течение всего обратного хода каретки уже не включает электродвигатель 25. Занимая исходное положение во время последнего шага каретка действует на микропереключатель 5, который снимает блокировку микропереключателя 9. Движение каретки завершается, ролик 20 переходит с участка «б на участок «в кулачка 21, а кулачок 23, воздействуя
0 на микропереключатель 24 (фиг. 21 отключает электромуфту 7. Тем временем ролик 20 ползуна 19 сходит с участка «г на участок «а (фиг. 2), а ползун 19, зубчатые рейки 12 и 13 и колеса 10 и 11 с электромуфтами 7 и 8 под действием пружины 52 возвращаются в исходное положение. Кулачок 23, воздействуя на микропереключатель 9 (фиг. 1), включает электромуфту 7 и выключает электродвигатель 24. Таким образом, время срабатывания электромуфт, а также инерционные силы движущихся масс не могут влиять на точность щага, так как включение и отключение ходового винта 4 происходит тогда, когда ролик 20 ползуна 19 находится в пределах участков «а или «в, представляющих собой части окружностей, и ползун 19 в это время неподвижен.
Высокая точность шага, а также возможность его бесступенчатой регулировки от 0,1 до 3,0 мм позволяет получить рельефное изображение с больщим количеством мелких деталей сложной конфигурации с минимальным искажением. Формула изобретения 1. Механизм шаговой подачи каретки копировально-фрезерного станка с программным управлением, содержащий ходовой винт с приводом, связанную с ним гайку, соединенную с кареткой, несущей обрабатываемое изделие, отличающийся тем, что, с целью обеспечения высокой точности шага и возврата каретки в исходное положение, привод винта выполнен в виде установленных на винте электромуфт рабочего и холостого хода, жестко соединенных с шестернями, свободно посаженными на ходовой винт и находящимися в зацеплении с подпружиненными зубчатыми рейками, несущими на своих торцах ролики, связанные с кулачками, выполненными с возможностью регулирования по высоте и установленных на подпружиненном ползуне, установленном с возможностью перемещения по определенной программе.
2. Механизм по п. 1, отличающийся тем, что кулачки выполнены в виде щарнирно закрепленных на ползуне планок, связанных с последним болтами, и снабженных указателем угла их наклона. Источники информации, принятые во внимание -при экспертизе: 1. Авторское свидетельство СССР № 280318, кл. В 65 G 47/00, 1969.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подачи стола копировальнофрезерного станка с программным управлением | 1977 |
|
SU657927A1 |
| Ленточнопильный станок | 1986 |
|
SU1397284A1 |
| ЭКСПОЗИМЕТР РЕПРОДУКЦИОННОГО ФОТОАППАРАТА | 1967 |
|
SU191347A1 |
| Загрузочное устройство | 1975 |
|
SU558776A1 |
| Диапроектор для испытания телевизионных передающих фотоэлектрических приборов | 1985 |
|
SU1327045A1 |
| Полуавтомат для изготовления многотраверсных цилиндрических сеток типа "беличьего колеса | 1973 |
|
SU720566A1 |
| МНОГОПОТОЧНАЯ МЕХАНИЗИРОВАННАЯ ЛИНИЯ | 1970 |
|
SU283452A1 |
| Резьбонарезной станок | 1981 |
|
SU990447A1 |
| Способ фотокопировальной обработки и устройство для его осуществления | 1979 |
|
SU770751A1 |
| Станок для изготовления электрических катушек | 1983 |
|
SU1220021A1 |
J7
Х:-.Ж::.
Лf9
ZI
ZJ .rx
/ТА
23
г
V
фцг2
