(54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления многодвигательным гидроприводом | 1986 |
|
SU1425605A1 |
| Программная следящая система | 1981 |
|
SU1108394A1 |
| Устройство для автоматического управления вращением объекта | 1991 |
|
SU1774309A1 |
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| Устройство для регулирования расхода | 1986 |
|
SU1377832A1 |
| Термостатирующее устройство | 1980 |
|
SU943666A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Многоканальная система управления процессом приготовления смесей | 1973 |
|
SU495647A1 |
Изобретение относится к автоматике и может быть использовано для программного управления гидропривода ми различных машин.
Известно устройство програглмного управления, содержащее датчик положения исполнительного органа, блок управления, блок задания программы, счетчик импульсов и логический блок
Недостатком этого устройства являштся узкие функциональные возможност и низкая надежность.
Наиболее близким техническим решением к изобретению является устройство для программного управления,содержащее последовательно соединенны датчик положения исполнительного ор-. гана, счетчик Импульсов,Jпервый блок сравнения, подключенньй к блоку зада ния программы, первый триггер, под-г ключенный.к блоку управления, к второму триггеру и к второму входу счетчика импульсов, и привод, подключенный к датчику начального положения исполнительного органа и к второму триггеру 2.
Это устройство меет низкую надежность в связи с самопроизвольным опусканием исполнительного органа.
Целью изобретения является повышение надежности устройства.
Достигается это тем, что устройство содержит задатчик зоны нечувствительности, первый элемент И, подключенный к второму триггеру и к второму входу счетчика импульсов, и последовательно соединенные второй элемент И, подключенный к датчику положения исполнительного органа и к первому элементу И, реверсивный счетчик, подключенный к первому элементу И, второй блок сравнения, подключенный к задатчику зоны нечувствительности, и логический блок, подключенный к реверсивному счетчику, к второму элементу И, к первому и второму триггерам и к блоку управления.
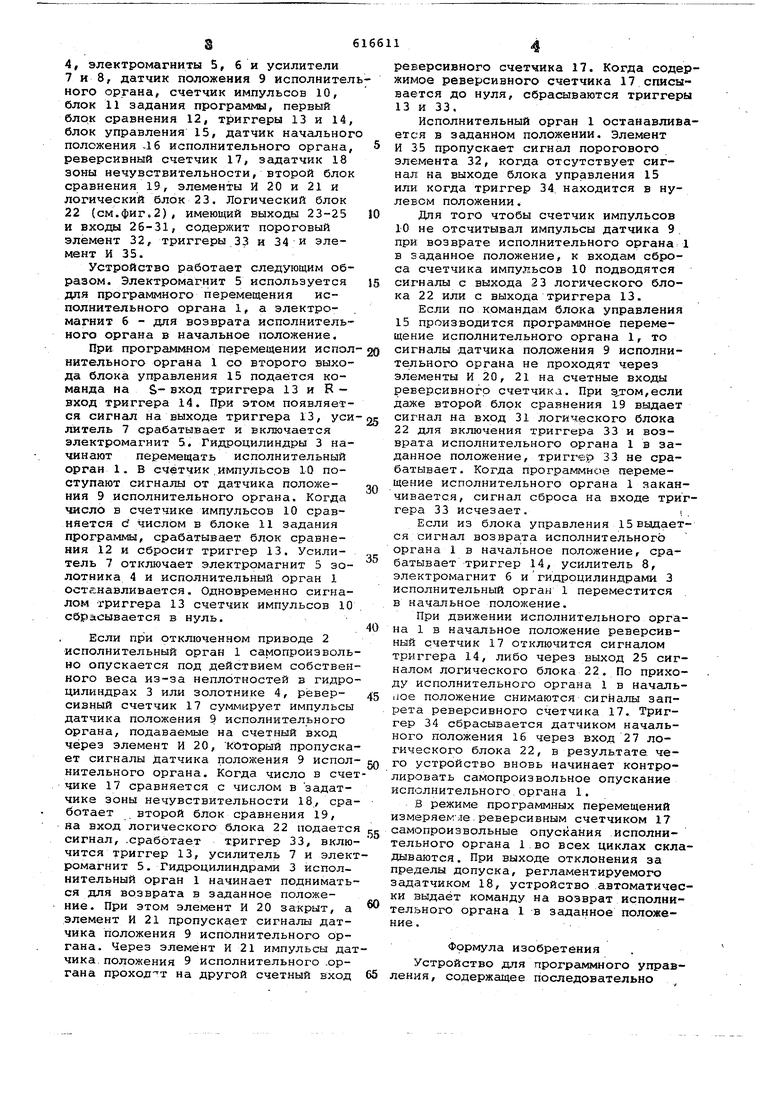
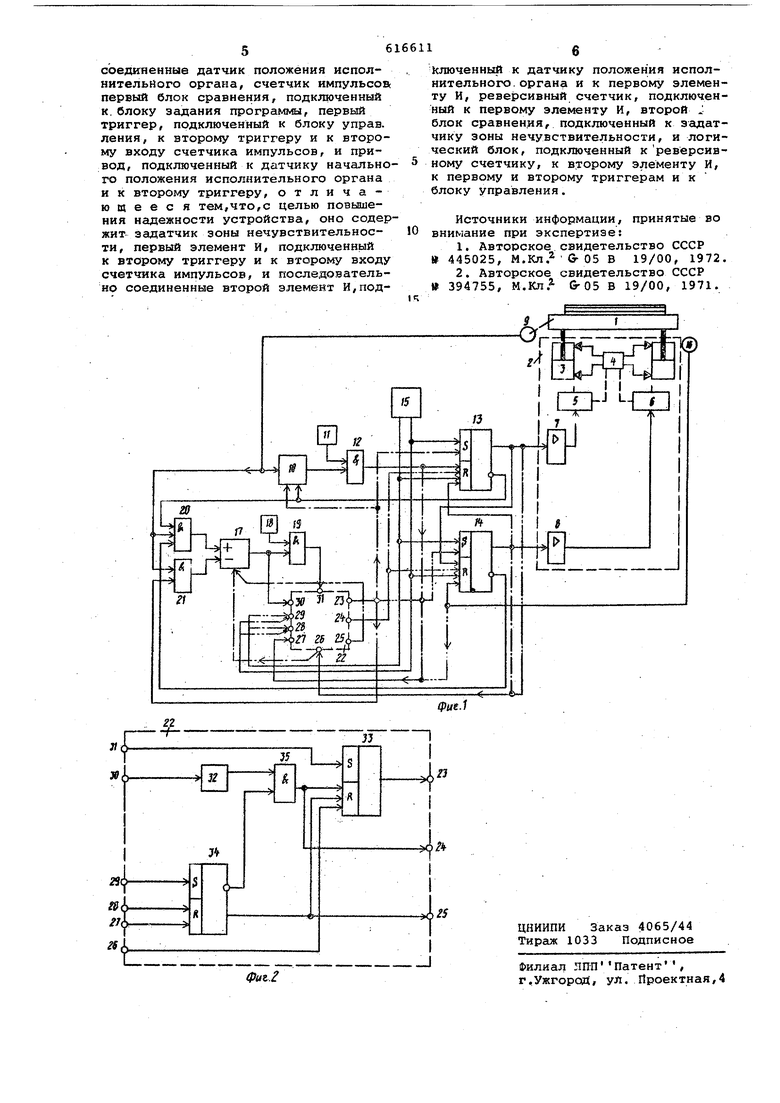
На фиг.1 представлена функциональная схема устройства; на фиг.2 - функциональная схема логическигр блока (Подключение логического блрка к уст-. ройству на фиг.1 при программном . подъеме показано штрих-пунктирными лИ ниями с одной точкой, а при програмч мном опускании - штрих-пунктирными линиями с двумя точками).
Устройство содержит исполнительный орган 1, привод 2-, содержащий гидроцилиндры 3, реверсивный золотник 4, электромагниты 5, б и усилители 7 и 8, датчик положения 9 исполнител ного органа, счетчик импульсов 10, блок 11 задания программы, первый блок сравнения 12, триггеры 13 и 14, блок управления 15, датчик начальног положения Л б исполнительного органа, реверсивный счетчик 17, задатчик 18 зоны нечувствительности, второй блок сравнения 19, элементы И 20 и 21 и логический блок 23. Логический блок 22 (см.фиг.2), имеющий выходы 23-25 и входы 26-31, содержит пороговый элемент 32, триггеры 33 и 34 и элемент И 35. Устройство работает следующим образом. Электромагнит 5 используется для программного перемещения исполнительного органа 1, а электромагнит 6 - для возврата исполнительного органа в начальное положение. При програмьшом перемещении испол нительного органа 1 со второго выхода блока управления 15 подаётся команда на S- вход триггера 13 и R - вход триггера 14. При этом появляется сигнал на выходе триггера 13, уси литель 7 срабатывает и включается электромагнит 5, Гидроцилиндры 3 начинают перемещать исполнительный орган 1. В счетчик.импульсов 10 поступают сигналы от датчика положения 9 исполнительного органа. Когда число в счетчике импульсов 10 сравняется cf числом в блоке 11 задания программы, срабатывает блок сравнения 12 и сбросит триггер 13. Усилитель 7 отключает электромагнит 5 золотника. 4 и исполнительный орган 1 остенавливается. Одновременно сигналом триггера 13 счетчик импульсов 10 сбрасывается в нуль. Если при отключенном приводе 2 исполнительный орган 1 самопроизволь но опускается под действием собствен ного веса из-за неплотностей в гидро цилиндрах 3 или золотнике 4, реверсивный счетчик 17 суммирует импульсы датчика положения 9 исполнительного органа, подаваемые на счетный вход через элемент И 20, который пропуска ет сигналы Датчика положения 9 испол нительного органа. Когда число в сче чике 17 сравняется с числом в задатчика зоны нечувствительности 18, сра ботает второй блок сравнения 19, на вход логического блока 22 подаетс сигнал, .сработает триггер 33, вклю чится триггер 13, усилитель 7 и элек ромагнит 5. Гидроцилиндрами 3 исполнительный орган 1 начинает поднимать ся для возврата в заданное положение. При этом элемент И 20 закрыт, а элемент И 21 пропускает сигналы датчика положения 9 исполнительного органа. Через элемент И 21 импульсы да чика положения 9 исполнительного .органа проход-т на другой счетный вход реверсивного счетчика 17. Когда содержимое реверсивного счетчика 17 списывается до нуля, сбрасываются триггеры 13 и 33. Исполнительный орган 1 останавливается в заданном положении. Элемент И 35 пропускает сигнал порогового элемента 32, когда отсутствует сигнал на выходе блока управления 15 или: когда триггер 34. находится в нулевом положении Для того чтобы счетчик импульсов 10 не отсчитывал импульсы датчика 9. при возврате исполнительного органа 1 в заданное положение, к входам сброса счетчика импульсов 10 подводятся сигналы с выхода 23 логического блока 22 или с выхода триггера 13. Если по командам блока управления 15 производится программное перемещение исполнительного органа 1, то сигналы датчика положения 9 исполнительного органа не проходят через элементы И 20, 21 на счетные входы рев;ер,сивНогр счетчика. При э,том,если даже второй блок сравнения 19 выдает сигнал на вход 31 логического блока 22 для включения триггера 33 и возврата исполнительного органа 1 в заданное положение, триппер 33 не срабатывает . Когда программное перемещение исполнительного органа 1 заканчивается, сигнал сброса на входе триггера 33 исчезает.. Если из блока управления 15 выдается сигнал возврата исполнительного органа 1 в начальное положение, срабатывает триггер 14, усилитель 8, электромагнит б игидроцилиндрами 3 Исполнительный орган 1 переместится в начальное положение. При движении исполнительного органа 1 в начальное положение реверсивный счетчик 17 отключится сигналом трихтера 14, либо через выход 25 сигналом логического блока 22. По приходу исполнительного органа 1 в начальjioe положение снимаются сигналы запрета реверсивного счетчика 17. Триггер 34 сбрасывается датчиком начального положения 16 через вход 27 логического блока 22, в результате чего устройство вновь начинает контролировать самопроизвольное опускание исполнительного.органа 1. В режиме программных перемещений измеряемле реверсивным счетчиком 17 самопроизвольные опускания исполнительного органа 1 во всех циклах складываются . При выходе отклонения за пределы допуска, регламентируемого задатчиком 18, устройство автоматически выдаёт команду на возврат исполнительного органа 1 в заданное положение . Формула изобретения Устройство для программного управления, содержащее последовательно
соединенные датчик положения исполнительйого органа, счетчик импульсоа первый блок сравнения, подключенный к. блоку задания программы, первый триггер, подключенный к блоку управ. ления, к второму триггеру и к второму входу счетчика импульсов, и привод, подключенный к датчику начального положения исполнительного органа и к второму триггеру, отличающееся тем,что,с целью повышения надежности устройства, оно содержит эадатчик зоны нечувствительности, первый элемент И, подключенный к второму триггеру и к второму входу счетчика импульсов, и последовательно соединенные второй элемент И,подКлюченный к датчику положения исполнительного, органа и к первому элементу И, реверсивный счетчик, подключенный к первому элементу И, второй : блок сравнения, подключенный к задатчику зоны нечувствительности, и логический блок, подключенный креверсивному счетчику, к в:горому элементу И, к первому и второму триггерам и к блоку управления.
Источники информации, принятые во внимание при экспертизе;
445025, М.Кл. G-05 В 19/00, 1972.
394755, М.КлЛ 6-05 В 19/00, 1971.
