Предлагается приспособление к дыхательным прессам для сигнализации об окончании установленного числа дыханий с использованием храповых механизмов, приводимых в действие от механизма пресса.
Для- передачи движения храповым механизмам в приспособлении применены связанные с маятником ползуны с кулачковыми поверхностями. Последние через толкатели попеременно воздействуют на собачки, поворачивающие хра повые колеса на заранее установленную величину между переставным упором и качающимся упором, хвостовик которого замыкает контакты электросигнальной цепи.
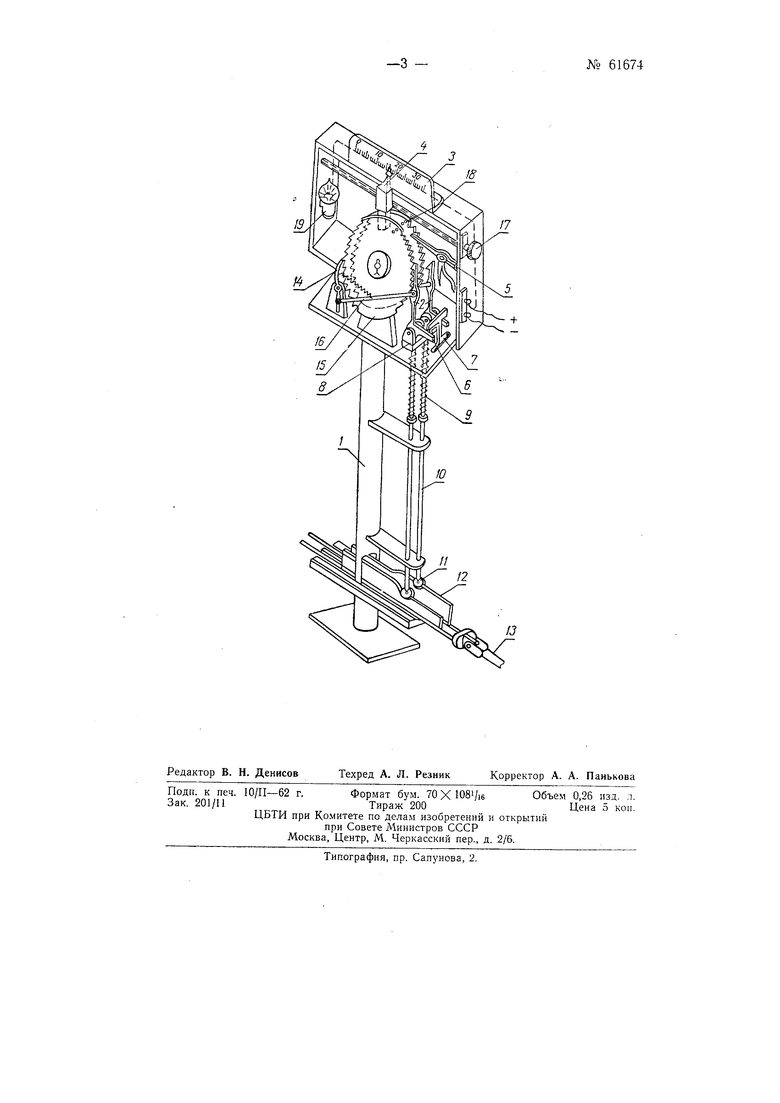
Приспособление (см. чертеж) состоит из парных храповых механизмов, устанОвленны.х на стойке 1, собачки 2 которых связаны с маятником п-ресса. После переключения пресса при окончании установленного числа дыханий собачки попеременно поворачивают .храповые колеса на определенную, зараиее установленную величину между переставным -по шкале 3 упором 4 к качающимся подпружиненным упором 5, хвостовик которого служит для замыкания контактов электросигнальной цепи.
Собачки 2 снабжены хвостовиками 6, которые, придя в соприкосновение с Т-образным упором 7, сообщают собачкам поворотные движения. Связь собачек с механизмом пресса достигается тем, что оси собачек помещены на головках 8 щтоков 9, соверщающих вертикальное возвратно-лоступательное перемещение. Штоки управляются подпружиненными толкателями 10, которые роликами 11 опираются на кулачковые пОВерхности ползунов 12, соверщающих при посредстве поводка /. .оризонтальное возвратно-поступательное перемещение от маятника пресса.
Для .поочередного переключения храповых механизмов подъемы кулачковых поверхностей на ползунах 12 направлены в противоположные стороны.
№ 61674
Дополнительные подпружиненные собачки 14 препятствуют вращению храповых колес 15 в обратном направлении в момент перехода рабочей сОбачки 2 на следующий зуб. Собачки /4 связаны при тяг 16 с собачками 2 таким образом, что при крайнем верхнем положении собачки 2, выщедщей из сцепления с храповиком, выходит из сцепления с xpanoiBHKOM и собачка 14. Эт№м достигается возвращение в исходное положение храпового колеса, соверщившего очередную работу, и переключение на работу другого храпового колеса.
Для установления числа дыханий пресса упор 4 с помощью винта 17 переставляют в необходимое положение по щкале 3; затем прибор включают. В это время одна из собачек 2 под действием толкателя 10, занимающего соответствующее положение на кулачковой поверхности ползуна, может сцепиться с храповым колесо м. При возвратно-поступательных движениях ползуна эта собачка будет поворачивать храповое колесо до тех тор, пока щпилька 18 «е дойдет до упора 5. Под действием щпильки качающийся упор 5 повернется и своим хвостовиком замкнет электрическую цеиь; загорится специальная ламиочка 19. Это будет свидетельствовать о том, что прессом сделано заданное число дыханий. Тогда ползун 12 переставляют вручную таким образом, чтОбы соверщивщая очередную работу собачка 2 отжалась и заняла нерабочее положение и чтобы другая собачка включилась и -произвела работу.
Предмет изобретения
1.Приопособление к дыхательным прессам для сигнализации об окончании установленного числа дыханий с использованием храповых механизмов, приводимых в действие от механизма пресса, отличающееся тем, что для передачи движения храповым механизмам от маятника пресса применены связанные с маятником ползуны с кулачковыми поверхностями, попеременно воздействующими при пооредсгве толкателей и щтоков «а собачки для поворота храповых колес на заранее установленную величину между переставным упором и качающимся упором, хвостовик которого замыкает контакты электросигнальной цепи.
2.Форма выполнения приспособления по п. 1, отличающаяся тем, что, с целью удержания храповых колес при их рабочем вращении от вращения вобратную сторону в момент перехода собачки на следующий зуб, -применены дополнительные подпружиненные собачки.
3.Форма выполнения приспособления по по. 1 и 2, отличающаяся тем, что собачки снабжены хвостовиками, которые сообщают собачкам поворотные движения от Т-образного упора.
4.Форма выполнения приспособления по пп. 1-3, отличающаяся тем, что, с целью возвращения соверщивщего очередную работу храпового колеса ,в исходное положение np« одновременном переключении на работу другого храпового колеса, собачки связаны при помощи, тяг с собачками таким образом, что при крайнем верхнем положении выщедщей из сцепления с храповиком собачки выходит из сцепления с храповиком и собачка.
5.Форма выполнения приспособления по пп. 1-4, отличающаяся тем, что, с целью поочередного переключения храповых механизмов, подъемы кулачковых поверхностей ползунов направлены в противоположные стороны.
18
17