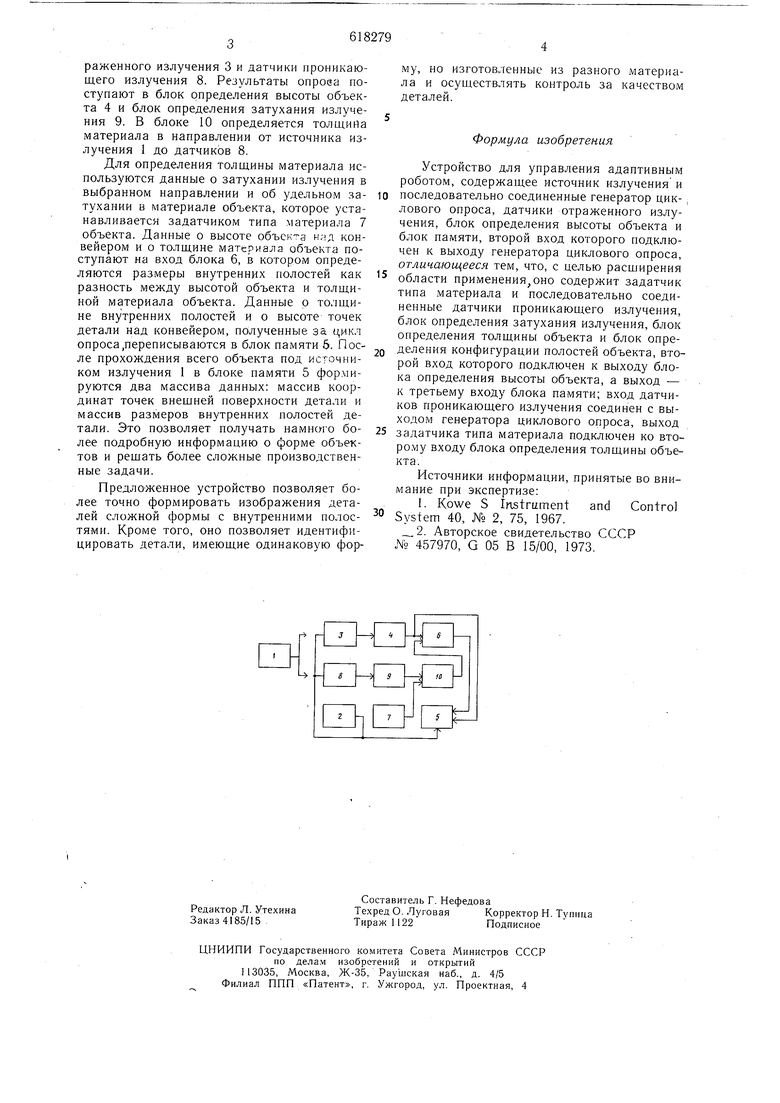
Изобретение относится к области вычислительной техники и может найти применение при автоматизации производственных процессов с использованием промышленных роботов. Известны устройства для управления адаптивньш роботом. Устройство 1, содержащее источник jf-излучения, блок детекторов, преобразователь и вычислительный блок, не позволяет определять конфигурацию объектов сложной формы. Наиболее близким техническим решением к изобретению является устройство 2, содержащее источник излучения и последовательно соединенные генератор циклового опроса, датчики отраженного излучения, блок определения высоты объекта и блок памяти, второй вход которого подключен к выходу генератора циклового опроса. Недостатком этого устройства является то, что оно не может формировать изображения внутренних полостей объектов. Целью изобретения является расширение области применения устройства. Для достижения этой цели предложенное устройство содержит задатчик типа материала и последовательно соединенные датчики проникающего излучения, блок определения затухания излучения, блок определения толщины объекта и блок определения конфигурации полостей объекта, второй вход которого подключен к выходу блока определения высоты объекта, а выход ; - к третьему входу блока памяти. Вход датчиков проникающего излучения соединен с выходом генератора циклового опроса, а выход задатчика типа материала подключен ко второму входу блока определения толщины объекта. На чертеже представлена структурная схема устройства. Оно содержит источник излучения 1, генератор циклового опроса 2, датчики 3 отраженного излучения, блок 4 определения высоты объекту, блок памяти 5, блок 6 определения конфигурации полостей объекта, задатчик 7 типа материала, датчики 8 проникающего излучения, блок 9 определения затухания излучения и блок 10 определения толщины объекта. Устройство работает следующим образом. При прохождении по конвейеру деталь попадает в зону действия источника 1 излучения (например/Г-излучения). Генератор циклового опроса 2 опрашивает датчики отраженного излучения 3 и датчики проникающего излучения 8. Результаты опроеа поступают в блок определения высоты объекта 4 и блок определения затухания излучения 9. В блоке 10 определяется толщина материала в направлении от источника излучения 1 до датчиков 8.
Для определения толщины материала используются данные о затухании излучения в выбранном направлении и об удельном затухании в материале объекта, которое устанавливается задатчиком типа материала 7 объекта. Данные о высоте объекта няд конвейером и о толщине материала объекта поступают на вход блока б, в котором определяются размеры внутренних полостей как разность между высотой объекта и толщиной материала объекта. Данные о толщине внутренних полостей и о высоте точек детали над конвейером, полученные за цикл опроса .переписываются в блок памяти 6. После прохождения всего объекта под источником излучения 1 в блоке памяти 5 формируются два массива данных: массив координат точек внещней поверхности детали и массив размеров внутренних полостей детали. Это позволяет получать намного более подробную информацию о форме объектов и рещать более сложные производственные задачи.
Предложенное устройство позволяет более точно формировать изображения деталей сложной формы с внутренними полостями. Кроме того, оно позволяет идентифицировать детали, имеющие одинаковую форму, но изготовленные из разного материала и осуществлять контроль за качеством деталей.
Формула изобретения
Устройство для управления адаптивным роботом, содержащее источник излучения и
последовательно соединенные генератор циклового опроса, датчики отраженного излучения, блок определения высоты объекта и блок памяти, второй вход которого подключен к выходу генератора циклового опроса, отличающееся тем, что, с целью расщирения
области применения оно содержит задатчик типа материала и последовательно соединенные датчики проникающего излучения, блок определения затухания излучения, блок определения толщины объекта и блок определения конфигурации полостей объекта, второй вход которого подключен к выходу блока определения высоты объекта, а выход - к третьему входу блока памяти; вход датчиков проникающего излучения соединен с выходом генератора циклового опроса, выход
задатчика типа материала подключен ко второму входу блока определения толщины объекта.
Источники информации, принятые во внимание при экспертизе:
1. Kowe S Instrtiment and Control
System 40, № 2, 75, 1967.
2. Авторское свидетельство СССР № 457970, G 05 В 15/00, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1983 |
|
SU1150616A1 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| Устройство контроля объемного веса руды на конвейерной ленте | 1982 |
|
SU1068725A1 |
| Устройство для контроля положения мобильного объекта относительно ориентирующей линии | 1989 |
|
SU1767478A2 |
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ | 1996 |
|
RU2131306C1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU862115A1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ | 1997 |
|
RU2182703C2 |
| Ручное устройство для исследований структуры биологических тканей | 2024 |
|
RU2830583C1 |
| Устройство для определения параметров положения объектов | 1984 |
|
SU1218406A1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
