1
Изобретение относится к области автоматического управления, а именно к числовому программному управлению, и может применяться в системах программного управления координатными перемещениями исполнительных органов станков.
Известны устройства для программного управления, в которых используются цифровые следящие системы для управления координатными перемещениями 1, 2.
Наиболее близким техническим решением к изобретению является устройство для программного управления, содержащее блок ввода программы, блок ручного управления, подключенный к входу формирователя напряжения, и последовательно соединенные усилитель, исполнительный двигатель, преобразователь аналог - код, блок сравнения и преобразователь код - аналог 3.
Однако в таком устройстве ручной вывод исполнительного инструмента в заданное, визуально контролируемое, положение производится с погрешностью, обусловленной инерционностью исполнительного устройства. Вследствие этого заданная координата отрабатывается с ошибками, что снижает точность устройства, причем требуется затрата дополнительного времени
для точной отработки заданного координатного положения.
Цель изобретения - повышение точности и быстродействия устройства.
Поставленная цель достигается тем, что в устройство введены элементы И и ИЛИ, причем выход преобразователя аналог-код через последовательно соединенные первый элемент И и первый элемент ИЛИ, один нз
входов которого подключен к выходу блока ввода программы, подсоединен к одному из входов блока сравнения, выход формирователя напряжения через последовательно соединенные второй элемент И и
второй элемент ИЛИ, один из входов которого подсоединен к выходу преобразователя код-аналог, подключен к входу усилителя, а выход блока ручного управления соединен с соответствующими входами первого и второго элементов И.
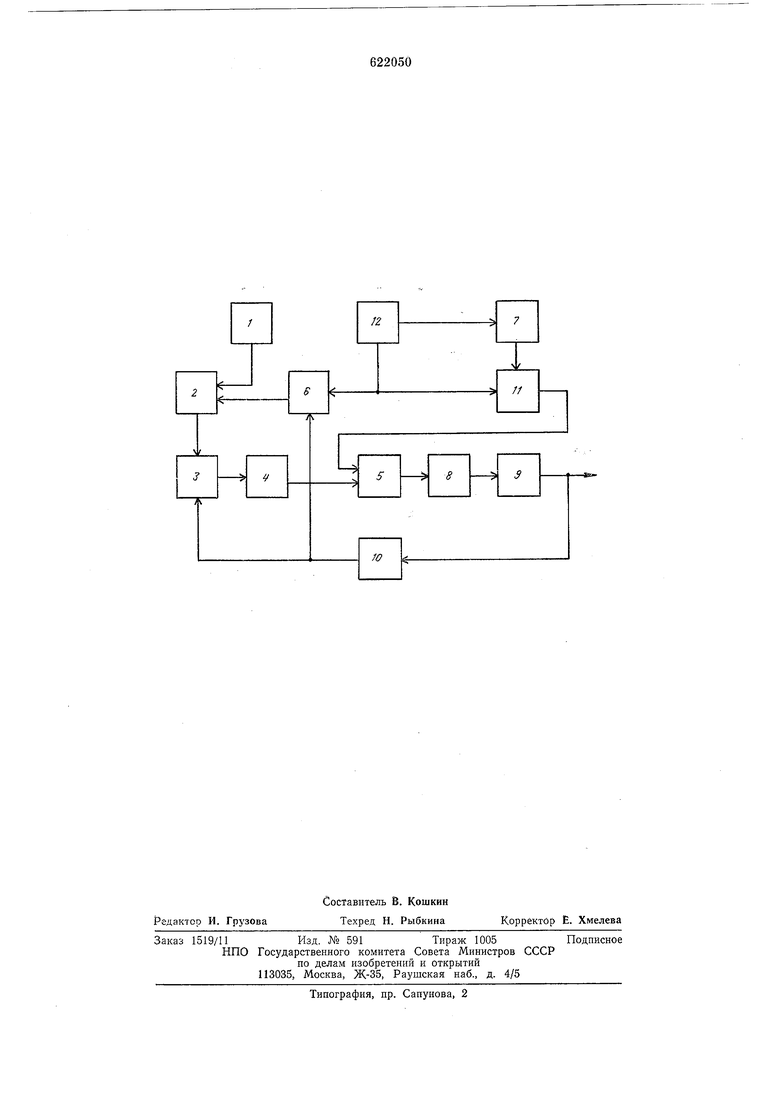
На чертеже представлена структурная схема устройства программного управления.
Устройство содерл ит блок 1 ввода программы, первый элемент ИЛИ 2, блок 3 сравнения, преобразователь 4 код-аналог, второй элемент ИЛИ 5, первый элемент И 6, формирователь 7 напряжения, усилитель 8, исполнительный двигатель 9, преобразователь 10 аыалог код, второй элемент И 11 и блок 12 ручного управления. Работает устройство следующим образом. Для вывода исполнительного инструмента в исходное, визуально контролируемое, положение, определяемое размером и расположением обрабатываемой детали, от блока 12 ручного управления на входы элементов И б, 11 подается разрешающий сигнал. Через элемент И 11 и элемент ИЛИ 5 на вход усилителя 8 поступает управляемое напрял ение с выхода формирователя 7 напряжения. Величина и знак управляемого напряжения определяют скорость и направление движения исполнительного органа и задаются блоком 12 ручного управления. Преобразователь 10 преобразует в цифровой код координатное полонсение исполнительного инструмента. Этот код подается на второй вход блока 3 сравнения для формирования кода разности с цифровым кодом заданного положения, поступающего на вход блока 3, на вход которого проходит цифровой код координатного положения с выхода преобразователя 10 через элемент И 6 и вход элемента ИЛИ 2. В результате на выходе блока 3 вырабатывается код разности, равный нулю, и на вход элемента ИЛИ 5 поступает управляющее напряжение, величина которого равна нулю. В момент совмещения исполнительного инструмента с заданным визуально контролируемым положением отключается блок 12 ручного управления, на входы элементов И поступает запрещающий сигнал. Прекращается поступление управляемого напряжения с выхода формирователя 7 на вход усилителя 8 и обновление цифрового кода координатного положения на вход блока 3 сравнения. В силу инерционности исполнительных органов происходит изменение положения инструмента, что отражается на изменении цифрового кода координатного положения на выходе преобразователя 10, который поступает на вход блока 3, вырабатывающий код разности между поступающим цифровым кодом координатного положения с выхода преобразователя 10 и последним значением цифрового кода, ноступивншм на вход блока 3. Рабога замкнутого контура управления обеспечивает отработку координаты визуально контролируемого положения. Использование данного устройства позволяет уменьшить затраты времени на вывод иснолнительного инструмента в заданное, визуально контролируемое, положение и новысить производительность и эффективность использования оборздовання, а также снизить стоимость и трудоемкость изготовления. Формула изобретения Устройство для программного управления, содержащее блок ввода порграммы, блок ручного управления, подключенный к входу формирователя напряжения, и последовательно соединенные усилитель, исполнительный двигатель, нреобразователь аналог-код, блок сравнения и преобразователь код - аналог, отличающееся тем, что, с целью повышения точности и быстродействия устройства, в него введены элементы И и ИЛИ, причем выход преобразователя аналог-код через последовательно соединенные первый элемент И и первый элемент ИЛИ, один из входов которого подключен к выходу блока ввода программы, подсоединен к одному из входов блока сравнения, выход формирователя напряжения через последовательно соединенные второй элемент И и второй элемент ИЛИ, один из входов которого подсоединен к выходу преобразователя код-аналог, подключен к входу усилителя, а выход блока ручного управления соединен с соответствующими входами первого и второго элементов PI. Источники информации, принятые во внимание при экспертизе 1.Муттер В. М. Аналого-цифровые слеящие антенны. Л., «Энергия, 1974. 2.Акцептованная заявка Великобритании № 1430315, кл. G 3N, 1976. 2. Патент США № 3.665.170, кл. 235-151, публик. 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкординатного программного управления | 1974 |
|
SU549788A1 |
| Тренажер сварщика | 1988 |
|
SU1550571A1 |
| Устройство для считывания графической информации | 1985 |
|
SU1282170A1 |
| Устройство для контроля металлизации отверстий в печатных платах | 1975 |
|
SU634290A1 |
| Устройство для управления вентильным преобразователем | 1980 |
|
SU1146781A1 |
| Устройство для считывания графической информации | 1984 |
|
SU1229785A1 |
| КАРДИОМОНИТОР КВАНТИЛЬНЫЙ | 1994 |
|
RU2107455C1 |
| Устройство для коррекции эквидистанты | 1977 |
|
SU732816A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Устройство для программного регулирования температры | 1986 |
|
SU1374194A1 |