Горизонтальные ковочные машины во многих случаях не отдают полной мощности при работе, так как не используются одновременно все хода машины. При процессе высадки только один ручей заполняется металлом. Остальные ручьи остаются свободными. Обычно же для высадки поковок в первых ручьях требуется незначительное усилие.
Для обеспечения высадки во всех ручьях машины одновременно предлагается приспособление для перемещения поковок из ручья в ручей во многоручьевом штампе. Данное приспособление позволит вести высадку на горизонтально-ковочных машинах одновременно во всех ручьях и автоматически перемещать поковки из ручья в ручей, тем самым производить выдачу поковки за один ход машины.
Приспособление размещается в основных звеньях высаживающего инструмента (матрицах). Оно выполнено в виде двух подвижных в вертикальном направлении раздвижных захватов, которые отличаются от уже известных конструкций тем, что один из этих захватов установлен в направляющей, наглухо прикрепленной к подвижной половине матрицы, и снабжен проушиной для укрепленного на ползуне машины клина, который служит для вертикального перемещения захватов. Второй захват установлен в направляющей, помещенной в неподвижной половине матрицы так, чтобы эта направляющая могла перемещаться в горизонтальном направлении под действием пружин. Оба захвата связаны между собой для совместного вертикального перемещения.
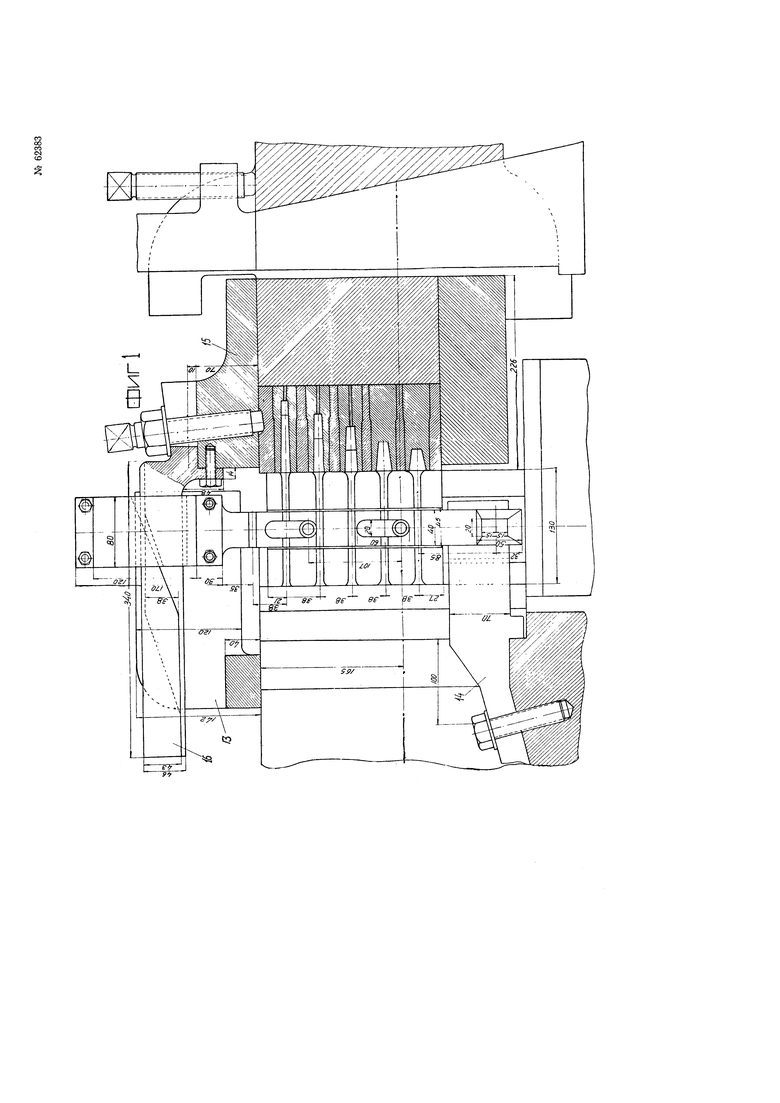
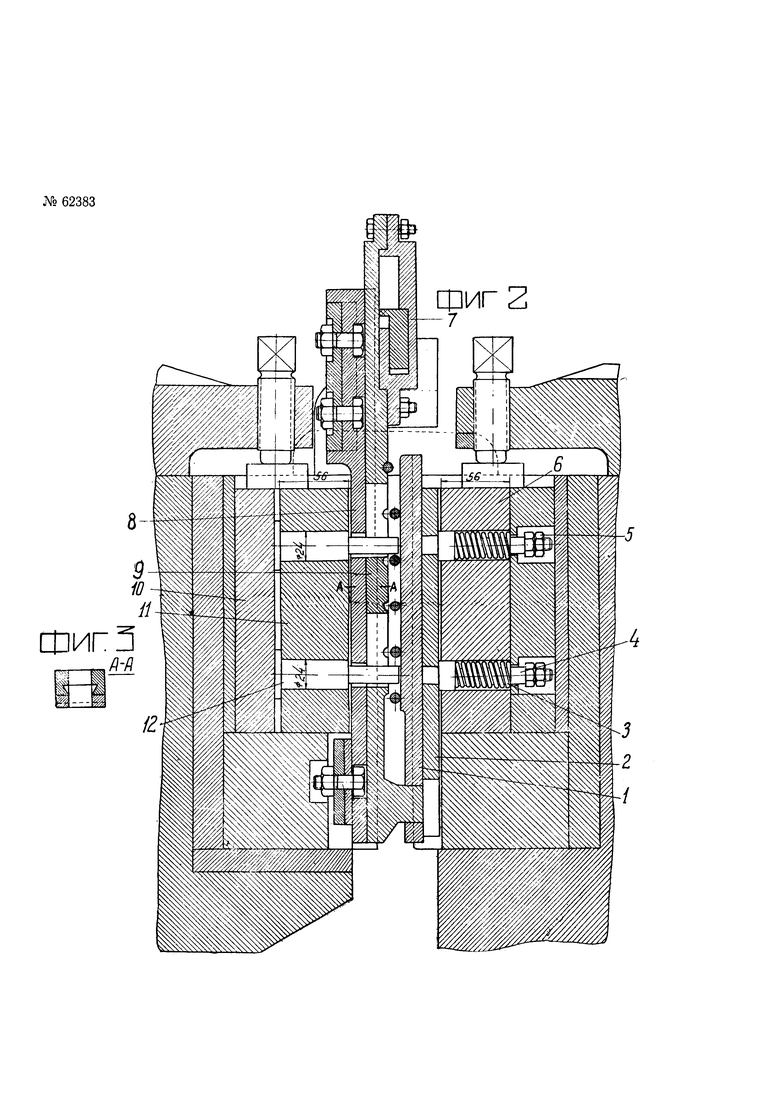
На фиг. 1 изображено приспособление в продольном разрезе; на фиг. 2 - то же, в поперечном разрезе; на фиг. 3 - разрез захвата и направляющей по А-А.
Приспособление находится в положении, соответствующем концу рабочего хода ползуна.
Направляющая 2 и захват 1 приспособления сочленяются между собой при помощи ласточкина хвоста так, что захват 1 имеет возможность скользить в направляющей в вертикальном направлении. Обе эти детали помещаются в пазу неподвижной матрицы 6. Направляющая 2 соединяется с пропущенными через отверстия матрицы шпильками 4, на которые надеты пружины 3, предварительно сжатые при помощи гаек 5, навернутых на шпильки.
Таким образом захват 1 и направляющая 2 под действием сжатых пружин 3 будут выходить из паза матрицы в горизонтальном направлении на величину, которая устанавливается хвостовыми гайками. В матрице 11 со вкладышем 10 и пальцами 12 устанавливается неподвижная направляющая 8 другого захвата 9. Направляющая 8 крепится к консольной балке 13 установленной над зевом машины в виде моста. Нижняя часть направляющей 8 крепится к кронштейну 14, укрепленному на основании зева машины.
Захват 9 на одной плоскости имеет ручьи, соответственно ручьям в матрицах, расположенные перпендикулярно оси по длине захвата. Захват 9 и направляющая 8 сочленяются между собой при помощи ласточкина хвоста, причем захват 9 имеет возможность скользить в направляющей 8 в вертикальном направлении. На верхнем конце захвата 9 крепится проушина 7 со скосами, в которой помещается двухсторонний клин 16, связанный с ползуном машины. При движении клина 16 вместе с ползуном в продольном направлении происходит вертикальное перемещение захватов 9 и 1; таким образом осуществляется вертикальное перемещение обрабатываемых деталей из ручья в ручей.
Клин 16 жестко крепится к пуансонодержателю 15; следовательно вертикальное перемещение захватов 1 и 9 связано с ходом рабочего ползуна машины. Опускание захватов 9 и 1 отвечает определенным положениям рабочего ползуна машины, а именно: опускание захватов 9 и 1 начинается после того, как рабочий ползун машины отойдет от своего крайнего переднего положения в сторону заднего исходного положения, например на 120 мм, и опускание будет происходить при дальнейшем его отходе в исходное положение. Закончится опускание в момент, когда рабочий ползун не дойдет до своего исходного положения на 5 мм. Подъем захватов 9 и 1 будет происходить при рабочем ходе рабочего ползуна и начинаться тогда, когда рабочий ползун машины не дойдет до стыка матриц на величину 120 мм, а закончится в конце рабочего хода ползуна.
При отходе рабочего ползуна из положения, показанного на чертеже, в исходное положение, будет отходить в исходное положение зажимная матрица; вслед за отходом зажимной матрицы будут отходить под действием пружин захват 1 и направляющая 2, удерживая обрабатываемые детали, например клапаны, в ручьях отходящей зажимной матрицы. Вместе с зажимной матрицей будут отходить детали, прижатые к ней захватом 1, на расстояние 5,5 мм, т.е. клапаны будут отходить с зажимной матрицей до момента, когда они своей сферой войдут в ручьи захвата 9 и останутся в нем на некоторый период времени, зажатые захватом 1. Дальше будет происходить опускание клапанов, зажатых между захватами 1 и 9. Опускание будет идти на величину, равную величине шага между осями ручьев, расположенных в матрицах.
При рабочем ходе матрицы и ползуна машины будет происходить следующее.
При ходе матрицы в зажимное положение зажимная матрица, дойдя сферой своих ручьев до клапанов, продолжает двигаться до крайнего своего зажимного положения, неся в своих ручьях клапаны, прижатые захватом 9, в ручьи подвижной матрицы. После момента зажатия клапанов в матрицах будет происходить высадка клапанов, и одновременно начнется следующий вышеописанный цикл подъема захватов 1 и 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ СТЕРЖНЕВЫХ ИЗДЕЛИЙ С ФЛАНЦЕМ НА ТОРЦЕ И БУРТОМ В СРЕДНЕЙ ЧАСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2041761C1 |
| Перекладчик к горизонтально-ковочной машине | 1972 |
|
SU450634A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Устройство к ковочной машине для изготовления деталей из штанп | 1956 |
|
SU108958A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СТЕРЖНЕВЫХ ИЗДЕЛИЙ С ФЛАНЦЕМ НА ТОРЦЕ И БУРТОМ В СРЕДНЕЙ ЧАСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2041007C1 |
| Устройство для перекладки заготовок | 1972 |
|
SU436698A1 |
| Горизонтально-ковочная машина | 1949 |
|
SU87872A1 |
| Горизонтально-ковочная машина | 1977 |
|
SU904859A1 |
| Устройство для подачи заготовок в горизонтально-ковочной машине | 1973 |
|
SU492335A1 |
| ГОРИЗОНТАЛЬНАЯ КОВОЧНАЯ МАШИНА | 1937 |
|
SU54900A1 |
Приспособление к горизонтальным ковочным машинам для перемещения заготовок из одного ручья штампа в другой посредством двух подвижных в вертикальном направлении раздвижных захватов, отличающееся тем, что один захват установлен в направляющей наглухо прикрепленной к подвижной половине матрицы, и снабжен проушиной для укрепленного на ползуне машины клина, служащего для вертикального перемещения захватов, а второй захват установлен в направляющей, помещенной подвижно в горизонтальном направлении под действием пружин в неподвижной половине матрицы, и связан с захватом для совместного вертикального перемещения.
