Изобретение относится к обработке металлов давлением и может быть использовано при разработке средств механизации и автоматизапии универсальных горизонтально-ковочных машин.
Известны устройства для перекладки заготовок из ручья Б ручей при автоматической штамповке па горизонтально-ковочной машине, содержащие имеюш,ую во3)можность пере.мешения в вертикальной плоскости рамку с захватами, клиновой механизм привода рамки, смонтированный на ползуне, и механизм переднего упора с муфтой.
Однако при попадании заготовок с различным в поле допуска диаметром в такие устройства возможен их перенос, при этом усложнена смена инструмента.
Предлагаемое устройство отличается тем, что рамка снабжена плоомими пружинами по числу ручьев, каждая из коТорых одним концом жестко закреплена на рамке, а на другом конце расположен захват. При этом рамка кинематически связана с муфтой механизма переднего упора.
Кроме того, клин механизма привода рамки выполнен подвижным относительно ползуна и снабжен тягой, установленной в ползуне кронштейна и постоянно в нем поджатой.
Это повышает надежность устройства в работе п упрощает смепу штамповочного инструмента.
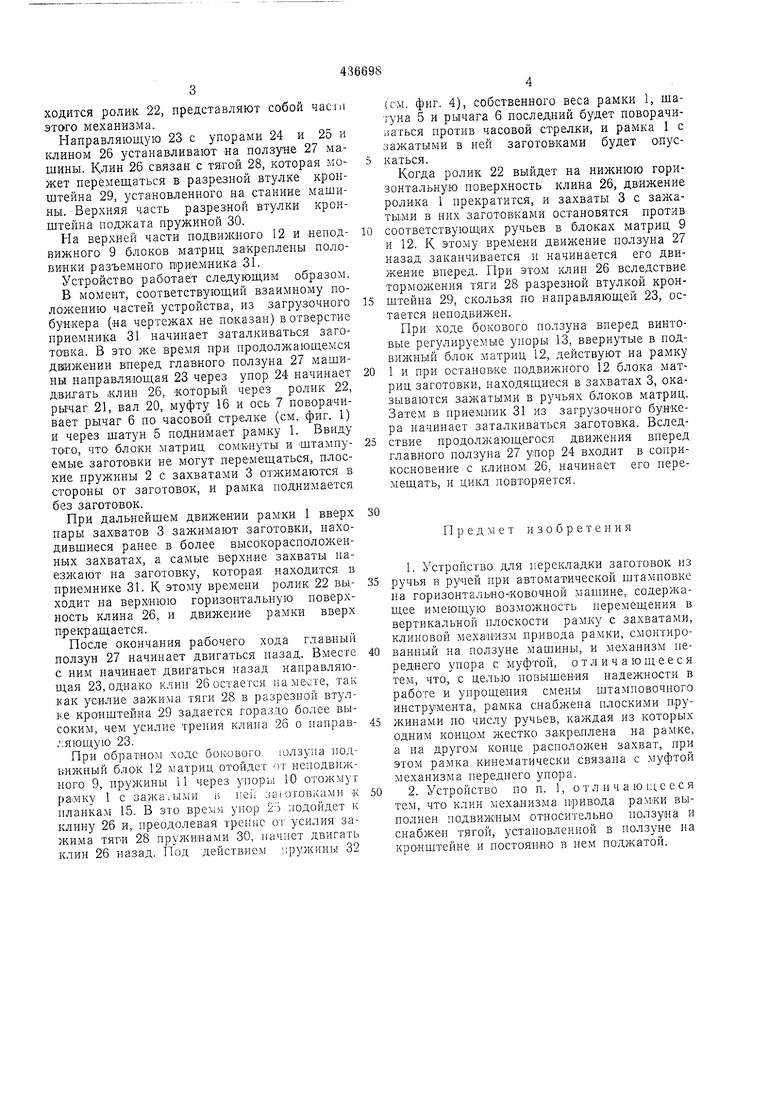
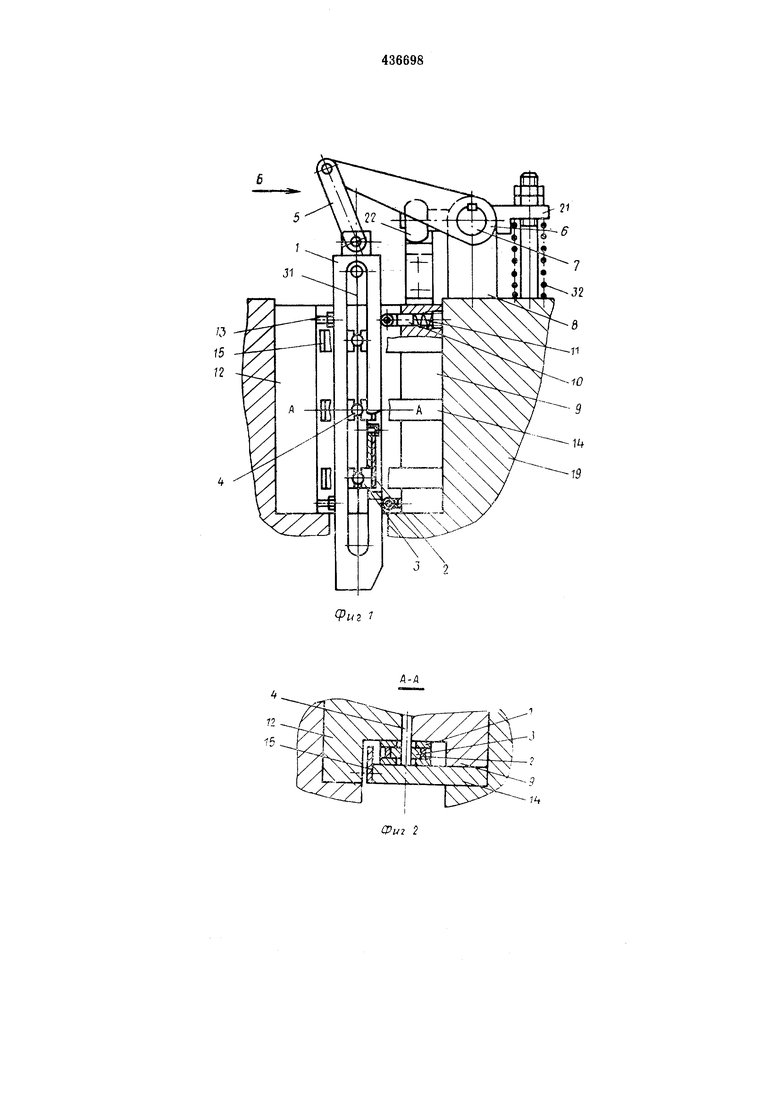
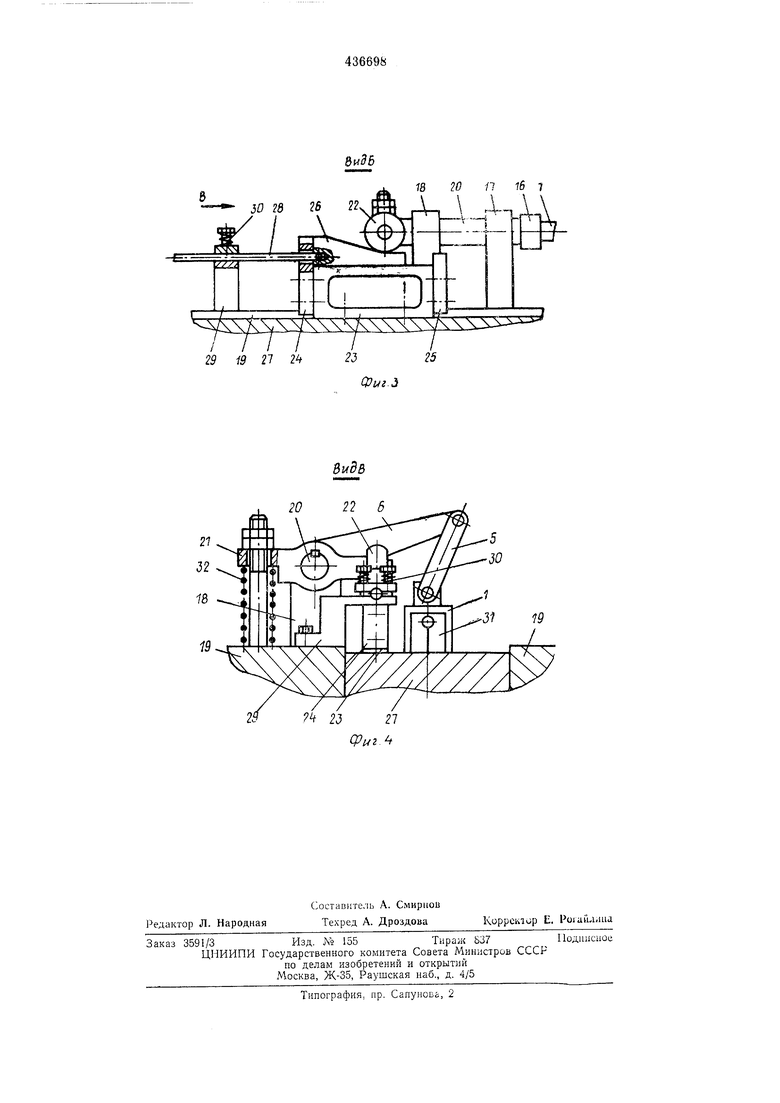
На фиг. 1 показано устройство, внд со стороны, противоположной главному ползуну и коленчатому валу машины; на фиг. 2 - сечение по А-А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 1; па фиг. 4 - вид по стрелке В на фиг. 3.
Устройство состоит из рамки 1 с закрепленными в ней консольно плоскими прул инами 2. На свободных концах пружин укреплены захваты 3, предназпаченные непосредственно для удерл ания штампуемых заготовок 4. Рамка 1 через шатун 5 шарнирно связана с рычагом 6, закрепленным на оси 7, которая опирается на кронштейн 8, прикрепленный к станине машины.
В неподвижном 9 блоке матриц расположены упоры 10, поджатые пружинами II. Нротпв подпружиненных упоров 10 в подвпжпый 12 блок матрнц ввернуты регулируемые винтовые упоры 13. К задним торцовым упорам 14 прикрйплепы планки 15, ограничивающие горизонтальное перемещение рамки 1. Ось 7 входит в муфту 16 механизма переднего упора, имеющегося на каждой универсальной горизонтально-ковочной машине. Кронштейны 17 и 18, расположенные на станине машины 19, а также, вал 20 с закреплепным на нем рычагом 21, на котором находится ролик 22, представляют собой част этого механизма.
Направляющую 23 с упорами 24 и 25 и клином 26 устанавливают на ползуне 27 машины. Клин 26 связан с тэгой 28, которая может перемещаться в разрезной втулке кронштейна 29, установленного на станине машины. Верхняя часть разрезной втулки кронштейна поджата пружиной 30.
На верхней части подвижного 12 и неподвижного 9 блоков матриц закреплены половинки разъемного приемника 31.
Устройство работает следующим образом.
В момент, соответствующий взаимному положению частей устройства, из загрузочного бункера («а чертежах не показан) в отверстие приелшика 31 начинает заталкиваться заготовка. В это ж& время при продолжающемся движении вперед главного ползуна 27 машины направляющая 23 через упор 24 начинает двигать клин 26, который через ролик 22, рычаг 21, вал 20, муфту 16 и ось 7 поворачивает рычаг 6 по часовой стрелке (см. фиг. 1) и через шатун 5 поднимает рамку 1. Ввиду того, ЧТО блоки матриц сомкнуты и штампуемые заготовки не могут перемещаться, плоские пружины 2 с захватами 3 отжимаются в стороны от заготовок, и рамка поднимается без заготовок.
Нри дальнейщем движении рамки 1 вверх пары захватов 3 зажимают заготовки, находившиеся ранее в более высокорасположенных захватах, а самые верхние захваты наезжают на заготовку, которая находится в приемнике 31. К этому времени ролик 22 выходит на верхнюю горизонтальную поверхность клина 26, и рамки вверх прекращается.
После окончания рабочего хода главный ползун 27 начинает двигаться назад. Вместе с ним начинает двигаться назад направляюп,ая 23, однако клип 26 остается Jia месте, так как уснлие зажима тяги 28 в разрезной втулке кронштейна 29 задается гораздо более высоким, чем усилие трения клипа 26 о иаправл:яющую 23.
При обратном ходе бокового юлзуиа подвижный блок 12 матриц отойдет от неподвижното 9, пружины 11 через упоры 10 отожмут paiMKV 1 с зажатыми п iieii заигговками к планкам 15. В это время упор 25 подойдет к клину 26 и, преодолевая трение от усилия зажима тяри 28 пружинами 30, капнет двигать клин 26 назад. Под действием пружины 32
(см. фиг. 4), собственного веса рамки 1, шатуна 5 и рычага 6 последний будет поворачииаться против часовой стрелки, и рамка 1 с зажатыми в ней заготовками будет опускаться.
Когда ролик 22 выйдет на нижнюю горизонтальную поверхность клина 26, движение ролика 1 прекратится, и захваты 3 с зажатыми в них заготовками остановятся против 0 соответствующих ручьев в блоках матриц 9 и 12. К этому времени движение ползуна 27 назад заканчивается и начинается его движение вперед. При этом клин 26 вследствие торможения тяги 28 разрезной втулкой кронs штейна 29, скользя по направляющей 23, остается неподвижен.
При ходе бокового ползупа вперед винтовые регулируемые упоры 13, ввернутые в подвижпый блок матриц 12, действуют на рамку 0 1 и при остапонке подвижного 12 блока матриц заготовки, находящиеся в захватах 3, оказываются зажатыми в ручьях блоков матриц. Затем в приемник 31 из загрузочпого бункера начинает заталкиваться заготовка. Вследствие продолжающегося движения вперед главного ползуна 27 упор 24 входит в соприкосновение с клином 26, начинает его перемещать, и цикл повторяется.
Предмет изобретения
1. Устройство для перекладки заготовок из
ручья в ручей при автоматической штамповке на горизонтально-ковочной машине, содержащее имеющую возможность перемещения в вертикальной плоскости рамку с захватами, клиновой механизм привода рамки, сМОнтированный на ползуне машины, и механизм переднего упора с муфтой, отличающееся тем, что, с целью повышения надежности в работе и упрощения смены штамповочного инструмента, рамка снабжена плоскими пружинами по числу ручьев, каждая из которых одним концом жестко закреплена на рамке, а па другом копце расположен захват, при этом рамка кинематически связапа с муфтой механизма передпего упора.
2. Устройство по п. 1, о т л и ч а ю 1ц е ее я тем, что клин механизма привода рамки выполнен подвижным относительно ползуна и снабжен тягой, установленной в ползуне на кронштейне и постоянно в нем поджатой.
J 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| ПРИСПОСОБЛЕНИЕ К ГОРИЗОНТАЛЬНЫМ КОВОЧНЫМ МАШИНАМ ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК ИЗ ОДНОГО РУЧЬЯ В ДРУГОЙ | 1941 |
|
SU62383A1 |
| РОТАЦИОННО-ОБЖИМНОЙ АВТОМАТ НЕПРЕРЫВНОГО | 1966 |
|
SU179739A1 |
| УСТРОЙСТВО для ПОДАЧИ ЗАГОТОВОК и УДАЛЕНИЯ ОТШТАМПОВАННЫХ ДЕТАЛЕЙ | 1965 |
|
SU171846A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Перекладчик к горизонтально-ковочной машине | 1972 |
|
SU450634A1 |
| Штамп к горизонтально-ковочной машине | 1972 |
|
SU438481A1 |
| Автомат для сборки коробок | 1990 |
|
SU1735047A1 |
| Устройство к ковочной машине для изготовления деталей из штанп | 1956 |
|
SU108958A1 |
18 20 11 16 7
V. Л-21 6
