(5) ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Зажимной механизм горизонтально-ковочной машины | 1980 |
|
SU994097A1 |
| Горизонтально-ковочная машина | 1985 |
|
SU1291268A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1972 |
|
SU435044A1 |
| Горизонтально-ковочная машина | 1973 |
|
SU610600A1 |
| ГОРИЗОНТАЛЬНО-КОВОЧНАЯ МАШИНА | 1967 |
|
SU224993A1 |
| Одноударный автомат для высадки гвоздей | 1982 |
|
SU1050793A1 |
| Автомат для изготовления гвоздей | 1979 |
|
SU1039625A1 |
| Гвоздильный автомат | 1980 |
|
SU971552A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Гвоздильный автомат | 1982 |
|
SU1121085A1 |
1
Изобретение относится к обработке металлов давлением, а именно к конструкциям горизонтально-ковочных машин.
Известна горизонтально-ковочная машина, содержащая станину, на которой смонтирован кривошипный вал, на основном кривошипе которого установлен кривошипно-шатунный механизм главного ползуна и кинематически связанный с ним боковой ползун с механизмом зажима til .
Горизонтально-ковочные машины с кулачковым приводом механизма зажима за счет подбора профиля кулака обеспечивают стабильный выстой матриц в процессе штамповки. Однако в процессе работь кулак привода механизма зажима контактирует с роликом бокового ползуна, как и все кулачковые механизмы по линии, и для обеспечения нормальной работы и исключения преждевременного износа роликов и кулаков механизма контактные напряжения не должны выходить за пределы допустимых. Это ограничивает возможности зажимного механизма и не позволяет создавать усилие захгима равное номинальному усилию высадки и тем более превышающего его и, следователь но, производить штамповку зажимным ползуном.
Исходя из возможностей кулачкового привода для обеспечения нормальной работы в существующих горизонтально-ковочных машинах усилие зажима принимается равным 1/3 от номинального усилия высадки, что вполне достаточно для удержания заготовки в матрицах при штамповке.
Однако ряд изделий требует, чтобы усилие зажима матриц превышало номинальное усилие высадки в 1,5-2 и более раз, как, например, при штамповке изделий из трубных заготовок. Во многих случаях имеется необходимость производить штамповку зажимным ползуном, как, например, при изготовлеНИИ буровых штанг и др, изделий, что не гложет обеспечить кулачковый привод горизонтально-ковочных машин.
Цель изобретения - увеличения усилия, передаваемого на механизм зажима.
Поставленная цель достигается тем что машина снабжена смонтированным на кривошипном валу дополнительным кривошипом, а также дополнительным шатуном, ползушка которого установлена в глухой полости с направляющими, выполненными в боковом ползуне.
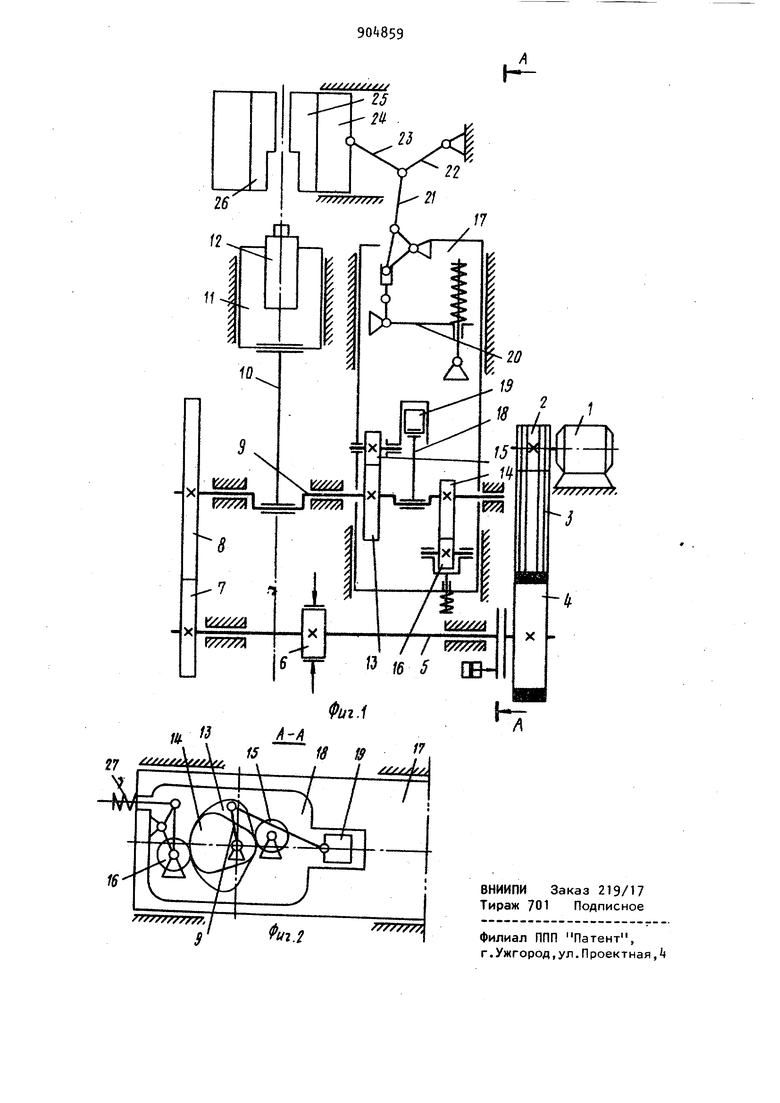
На фиг. 1 изображена кинематическая схема горизонтально-ковочной машины; на фиг. 2 - привод механизма зажима. Горизонтально-ковочная машина содержит электродвигатель 1 привода ма шины, шкив 2, клиноременную передачу 3, муфту-маховик Ц, установленную на приводном валу 5, на котором монтирован тормоз 6 привода, шестерня 7, передающая вращение через зубчатое колесо 8 кривошипному валу 9, с которым соединен шатун 10 высадочного ползуна 11 с установленными на нем пуансонами 12. На кривошипном валу монтируются кулаки 13 и I привода механизма зажима, которые контактируют с роликами 15 и 16 бокового пол зуна 17, шатун 18, ползушку 19, уста новленную в направляющих бокового ползуна 17 и сообщающую ему движение в период рабочего хода. На боковом ползуне монтировано предохранительное устройство 20, через которое с помощью рычагов 21-23 боковой ползун соединен с зажимным ползуном 2Ц С установленной на нем подвижной мат рицей 25. Неподвижная матрица 26 мон тируется на станине машины. Пружина 27 ролика обратного хода обеспечивает постоянный контакт ролика 1б с ку лаком 14. Машина работает следующим образом Вращение от электродвигателя 1 через шкив 2, ременную передачу 3 передается на маховик k, в котором монтирована муфта включения. При под че сигнала на включение машины тормо 6 освобождает вал 5, после чего подается сигнал на включение муфты, которая сцепляет маховик k с приводным валом 5- Вращение от вала 5 через шестерню 7 передается зубчатому колесу 8, закрепленному на кривошипном валу 9. Движение от кривошипного
вала 9 передается по двум цепям: через шатун 10 высадочному ползуну 11 с закрепленными на нем пуансонами 12 и через кулаки 13 и 1, ролики 15 и 16, шатун 18 и ползушку 19 боковому ползуну 17, предохранительному устройству 20, систему рычагов 21-23, зажимному ползуну 2k, на котором закреплена подвижная матрица 25. В начале хода бокового ползуна движение ему сообщается через ролик 15 кулаком 13, при этом от шатуна 18 ползушка 19 также получает движение, но в виду того, что между ползушкой 19 и боковым ползуном 17 имеется зазор, в период холостого хода механизма зажима, движение ползуну 17 от шатуна 19 не передается. При дальнейшем движении ползушки 19 относительно бокового ползуна 17 их скорости выравниваются и дальнейшее перемещение механизма зажима осуществляется от кривошипного вала через шатун 18, ползушку 19, боковой ползун 17, предохранительное устройство 20, систему рычагов 21-23 зажимному ползуну 2 с закрепленной подвижной матрицей 25. Происходит рабочий ход, а затем зажим матриц с заданным усилием. При дальнейшем повороте кривошипного вала ползушка 19 начинает отходить от бокового ползуна 17, пружиной 27 обеспечивается контакт роликов 15 и 1б с соответствующими профилями кулаков. Удерживание матриц в зажатом положении обеспечивается кулаком 13. После совершения осадки высадочным ползуном 11 последний отходит в заднее исходное положение, при этом матрица 25 с ползуном 2k также начинает отходить в исходное положение. Отвод зажимного ползуна осуществляется кулаком 14 через ролик 16, боковой ползун 17. предохранительное устройство 20, систему рычагов 21-23. Ползушка 19 в это время свободно перемещается в ползуне 17. Высадочный ползун 11 и зажимной ползун 2k совершили полный цикл, и все механизмы останавливаются в исходном положении. В дальнейшем цикл повторяется в описанной последовательности; Если муфту не выключать, машина работает в автоматическом цикле. Технико-экономическая эффективность горизонтально-ковочной машины, выполненной по предлагаемой кинематической схеме, позволяет производить
надежный зажим заготовки при стабильном выстое матриц в зажатом положении с усилием, равным или превышающим номинальное усилие высадки, производить штамповку зажимным механизмом с усилием, равным или превышающим номинальное усилие высадки, что позволит обеспечить возможность штамповки ряда поковок только на горизонтальноковочной машине без последующей пере-О дачи на другой вид оборудования, что позволяет сократить количество используемого оборудования.
Формула изобретения
Горизонтально-ковочная машина, содержащая станину со смонтированным на ней кривошипным валом, основной
кривошип которого связан шатунным механизмом с главным ползуном, а также боковой ползун, связанный с зажимным ползуном, отличающаяся тем, что, с целью повышения качества работы за счет стабилизации усилия зажима зажимного ползуна, она снабжена смонтированным на кривошипном валу дополнительным криtsИсточники информации,
принятые во внимание при экспертизе
И. ГориМ. Нюнько 0.
М., 19б4, зонтально-ковочные машины. с. 15-32, рис. 7. вошипом, а также дополнительным ша|туном с ползушкой, установленной в индивидуальных направляющих бокового ползуна.
