(54) УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ
ной, а выход блока кoppeкц)и отклонения регулируемого параметра соединен с четвертым входом счетно-решающего блока.
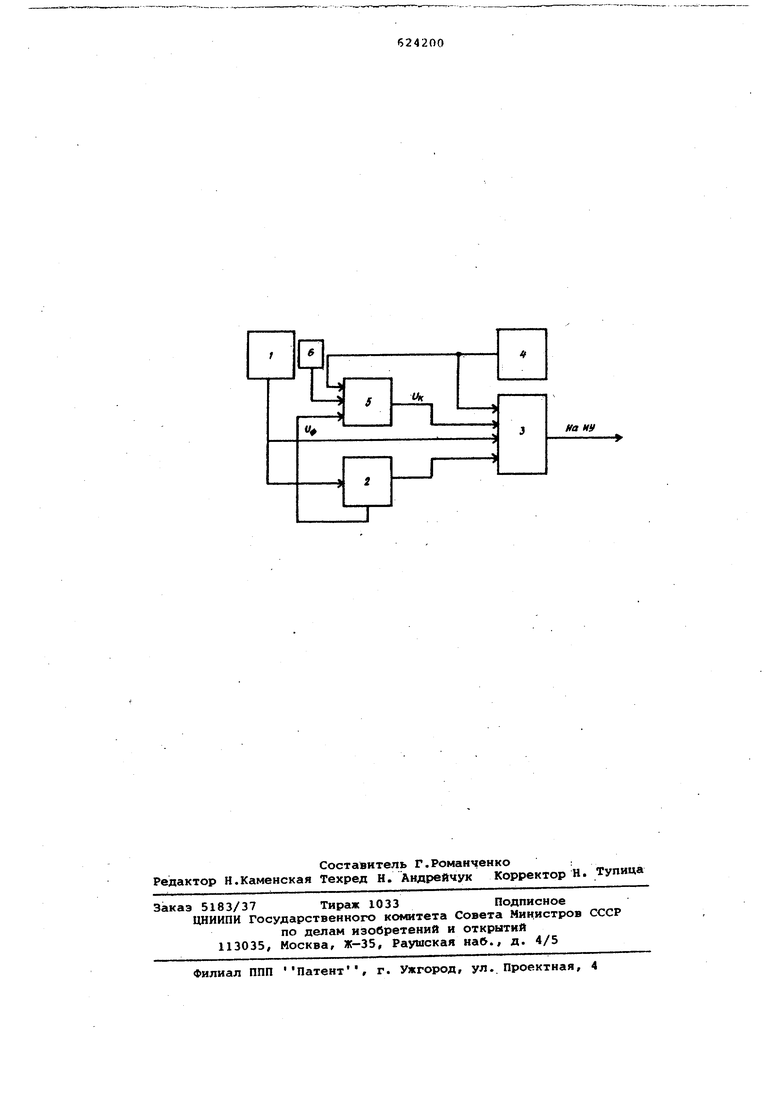
На чертеже представлена структурная схема устройства для формирования сигнала управления, которое содержит датчик регулируемого параметра 1 , блок формирования си::нала производной 2, счетно-решающи блок 3, датчик обратной связи 4, блок коррекции отклонения регулируемо)7О параметра 5 и источник опорного напряжения б. .
Выход счетно-решающего 3 связан с исполнительным устройством (ЙУ) судна (на чертеже не показано).
Устройство работает следующим образом.
Выработанный датчиком р€ гулируемого параметра 1 сигнал от1:лонения этого параметра поступает т входы блока 3 и одновременно на елок 2, на первом выходе которого вырабатывается сигнал производной, необходимый для обеспечения требуемого качества регулирования. Формирование этого сигнала производной в блоке 2 осуществляется, например, с помощью двух операционных усилителей (на чертеже не показаны) - суммирующего и интегрирующего, причем сигнал производной снимается с выхода суммирующего усилителя, на входы которого . подаются низкочастотный сигнал отклонения И ф с интегрирующего /силителя этого блрка и сигнал отклонения Д X с датчика регулируемого параметра 1.
Принцип коррекции сигнала отклонения регулируемого параметра заключается в следующем.
На входе блока коррекции отклонения регулируемого параметра 5 произ водится непрерывная оценка скорости изменения разности напряжений AllEKtrqa-TIg , где Xfoj. - сигнал с датчика обратной связи 4, а: К Up пропорционально низкочастотной составляющей ошибки регулирования д х при этом ХГ ос соответствует в€:личине стаб1улйзирующего воздействия , создаваемого исполнительным устрсйством (ИУ) , судна по сигналам сче-: но-решающего блока 3.
Как только значение/ДИ/ превзойдет величину &Хо 7 где ДХо требуемое из условий .эксплуатации значение ошибки регулирования, устанавливаемое на источнике опорного напряжения 6, с выхода блока коррекции Отклонения регулируемого параметра 5 на четвертый вход счетно-решающего блока 3 поступит сигнал коррекции),; амплитуда которого пропорциональна модулю/дIT/, знак обратен знаку разности ди что обеспечивает при регулировании более полное по сравнению
с известными устройствами использование имеющейся на судне мощности исполнительных устройств (ИУ).
При ошибке регулирования, .не превосходящей значения Лх сигнал коррекции с блока коррекции отклонения регулируемого параметра 5 на вход счетно-решающего блока 3 не поступает, а управление производится по сигналам датчика регулируемого параметра 1 и блока формирования сигнала производной 2.
Таким образом, предлагаемое устройство для формирования сигнала управления обеспечивает повышение точности и надежности работы устройства за счет повышения качества воспроизведения в блоке формирования сигнала производной 2 с использованием сглаженного низкочастотного сигнала ошибки регулирования коррекции с блока коррекции отклонения регулируемого параметра 5 управляющего сигнала,
0 вырабатываемого счетно-решаюшим блоком 3.
При этом благодаря предложенному техническому решению значительно упрощается конструкция за счет сокра5щения общего количества операционных устройств, используемых в известных, системах аналогичного назначения,что обеспечивает технико-экономический эффект, состоящий в повышении ка0чества регулирования и надежности устройства.
Формула изобретения
УСТРОЙСТВО для формирования сигнала управления, содержащее источник опорного сигнала, датчик регулируемого параметра, выход которого соединен с первым входом счетно-решающего блока и со входом блока формирования сигнала производной, первый выход которого подключен ко второму входу счетно-решающего блока, датчик обратной связи, соединенный с третьим входом счетно-решающего блока, о т ли чающее.с я тем, что, с целью
5 50 55 повышения точности и надежности устройства, оно содержит блок коррекции отклонения регулируемого параметра, к первому, второму и третьему входам которого подключены соответственно датчик обратной связи, источник опорного напряжения и второй выход блока формирования сигнала производной, а выход блока коррекции отклонения регулируемого параметра соединен с четвертым входом счетно-решающего блока.
Источники информации, принятые во внимание при экспертизе:
1.Патент Франции № 2153689, кл. Q 05 D 1/00, 1971.
0
2.Авторское свидетельство СССР 264178,кл. В 63 Н 25/04, 1969. 5
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1977 |
|
SU648941A1 |
| Система регулирования | 1977 |
|
SU732824A1 |
| Устройство для формирования релейнопропорционального сигнала управления | 1977 |
|
SU696406A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ПО ПИД-ЗАКОНУ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2510956C2 |
| Система автоматической стабилизации судна без хода | 1976 |
|
SU583032A1 |
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| Система управления | 1977 |
|
SU938252A1 |
| Устройство для адаптивной настройкиРЕгуляТОРА ТОлщиНы пРОКАТА HA ТРЕбуЕМыйпАРАМЕТР | 1976 |
|
SU806187A1 |
| Автоматическая система управления силовым приводом судового руля | 1983 |
|
SU1102715A2 |
| Устройство для регулирования постоянного напряжения | 1975 |
|
SU584296A1 |