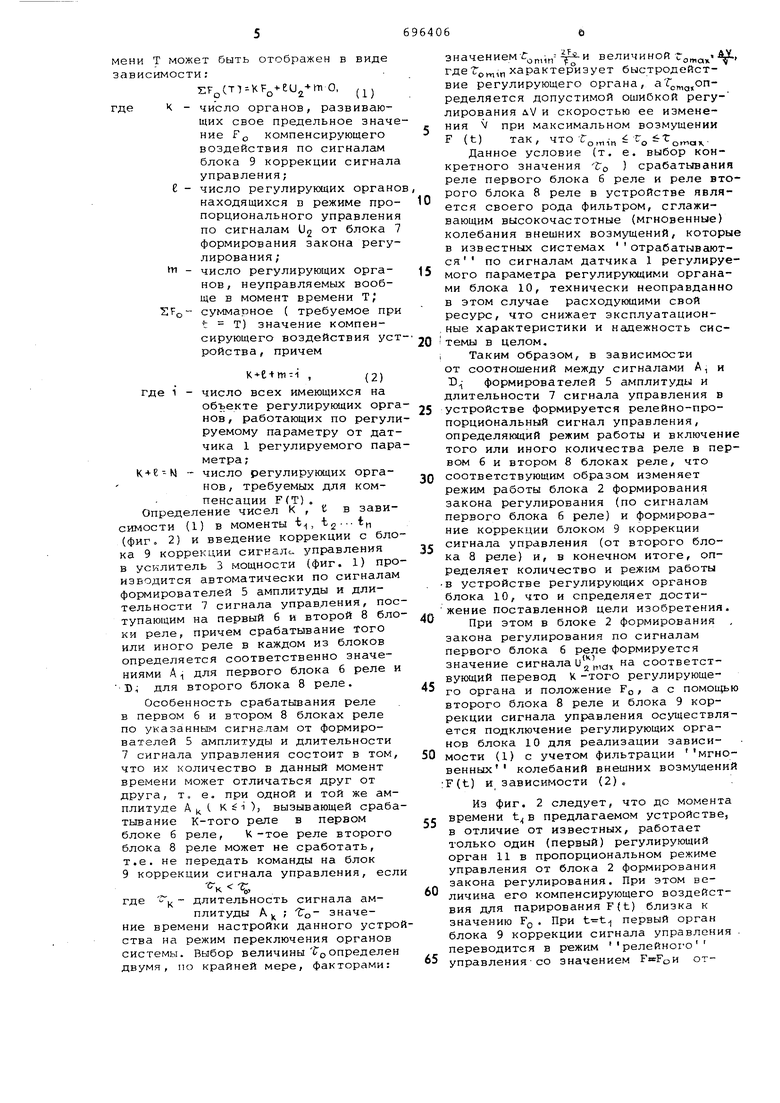
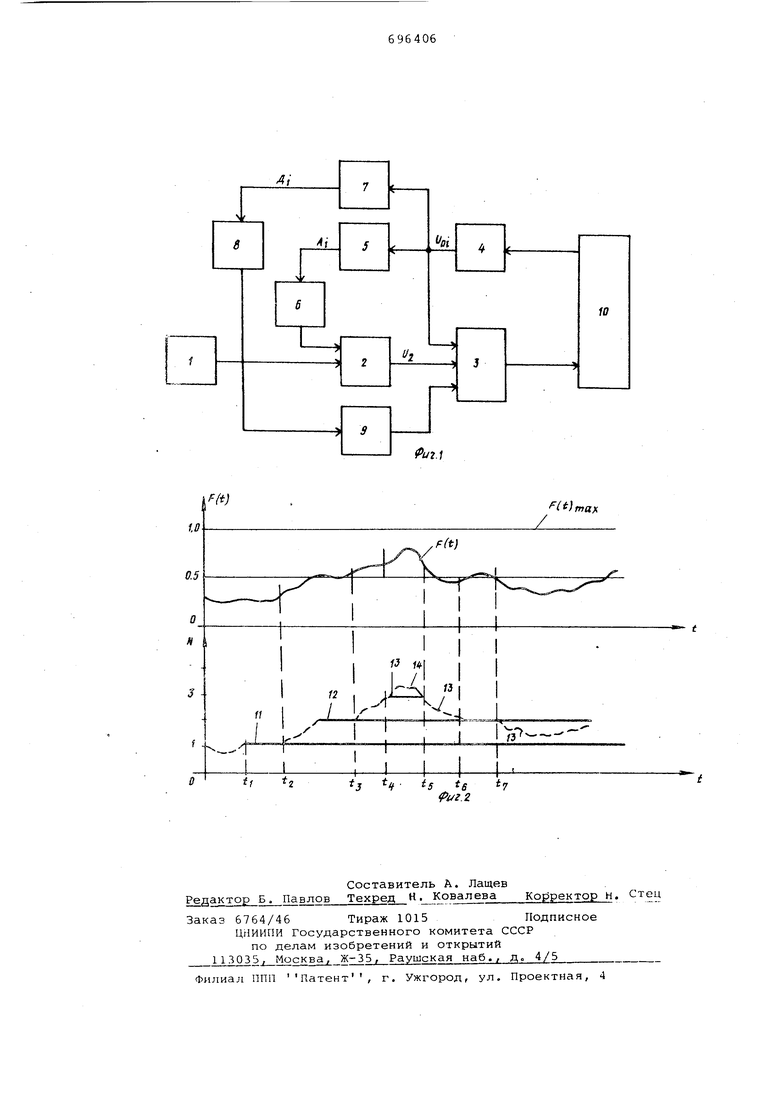
(54) УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ РЕЛЕЙНОГРОПОРЦИОНАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ же в пропорциональном (пунктирная линия) режиме работы. Предлагаемое устройство содержит датчик 1 регулируемого параметра 1, блок 2 формирования закона регулирования, усилитель 3 мощности, блок 4 обратных связей, формирователь 5 амплитуды сигнала управления, первый блок 6 реле, формирователь 7 дли тельности сигнала управления, второ блок 8 реле, блок 9 коррекции- сигнал управления, блок 10 регулирующих органов и первый, второй, третий и четвертый регулирующие органы 11, 12, 13, и 14. Предлагаемое устройство работает следующим образом. Выработанный датчиком 1 сигнал отклонения регулируемого параметра поступает в блок 2 формирования закона регулирования, в котором вырабатывается соответствующий принятом закону сигнал управления, содержащий, например, составляющие произво ной и интеграла регулируемого параметра. Этот суммарный сигнал управ ления поступает в усилитель 3 мощности, где сравнивается с сигналом обратных связей, выработанным блоком 4 обратных связей. С усилителя 3 мощности сигнал управления поступ ет на блок 10 регулирующих органов, который осуществляет тем или иным образом непосредственное изменение регулируемого параметра. Если изменение регулируемого пар метра (на примере известных устройс вызвано изменением характера внещних возмущений (например, при стабилизации курса судна на волнении и при действии ветра), то регулирую щие органы блока 10 осуществляют компенсацию этих возмущений, причем каждый из этих регулирующих органов в соответствии с принятым законом вносит свой вклад компенсирующего (в том числе и равный) воздействия и управляется от блока 2 формирования закона регулирования непрерывно в течение всего времени процесса регулирования. Сигналы, пропорциональные вкладу компенсирующего воздействия каждого регулирующего органа блока 10, вырабаты ваются в блоке 4 обратных связей и используются при формировании закона управления. В отличие от известных устройств в предлагаемом устройстве формируемый в блоке 2 формирования закона регулирования сигнал управления зависит от характера и состояни в данный момент времени внешних возмущений F (t) и таким образом, что при изменении возмущений в диа пазоне максимального компенсирующего воздействия FO одного регулирую щего органа, включение в работу остадшихся органов не производится. при F (t) F(-, число работающих о сигналам блока 2 формирования акона регулирования органов N опеделяется автоматически из соотавтоматическиN -р- путем коррекции ошения игнала управления, вырабатываеого блоком 2 формирования закона егулирования. Указанная зависимость сигнала правления блока 2 определяется аботой формирователей 5 амплитуды и длительности сигнала управления, ервого 6 (амплитудного) и второго (длительности) блоков реле, блока коррекции сигнала управления и аключается в следующем. Выработанные блоком 4 обратных вязей сигналы положения регулирующих рганов блока 10 одновременно постуают на входы формирователей. 5 амплитуды и длительности 7 сигнала управления для оценки соответственно амплитуд и длительности этих сигналов. При этом формирователь 5 амплитуды сигнала управления вырабатывает сигналы А,- , пропорциональные амплитудам, а формирователь 7 длительности сигнала управления сигналы , пропорциональные длительности нахождения каждого из 1 -тых регулирующих органов блока 10 на своем максимальном значении F,, например, имеет при управлении по курсу судна физический СГ4ЫСЛ стабилизирующего момента. Укгзанная последовательность формирования сигналов А и принята в устройстве, во-первых, на базе оценки сигналов блока 4 обратных связей, где i - число имеющихся регулирующих органов, и, во-вторых, с учетом характера изменения во-времени внешних возмущений F (t) Дальнейшее прохождение в предлагаемом устройстве этих сигналов основывается, исходя из принципа коррекции сигнала управления блока формирования закона регулирования. . Корректирование сигнала блока 2 формирования закона управления состоит в том, что, в отличие от извес ных систем, регулирующие органы блока 10 управляются от усилителя мощности 3 в релейно-пропорциональном режиме, причем релейность управления заключается в том, что часть органов системы находится на своем предельном значении F и отключена от блока 2 формирования закона управления блоком 9 коррекции сигнала управления, а другая часть регулирующих органов блока . 10 находится в режиме пропорционального управления по сигналам блока 2 формирования закона регулирования. Таким образом, предлагаемый принцип работы устройства в момент времени Т может быть отображен в виде зависимости; (1) где К - число органов, развивающих свое предельное знач ние FQ компенсирующего воздействия по сигналам блока 9 коррекции сигнал управления; - число регулирующих орган находящихся в режиме про порционального управлени по сигналам Uj от блока формирования закона регу лирования ; 11 - число регулирующих органов, неуправляемых вообще в момент времени т; суммарное ( требуемое пр t Т) значение компенсирующего воздействия ус ройства, причем K+e-tm -i , (2) где 1 - число всех имеющихся на объекте регулирующих орг нов, работающих по регул руемому параметру от дат чика 1 регулируемого пар метра ; К+ЕМ - число регулирующих органов, требуемых для компенсации F(T) . Определение чисел К , t в зави симости (1) в моменты Ь, (фиг. 2) и введение коррекции с бл ка 9 коррекции сигнале, управления в усилитель 3 мощности (фиг. 1) пр изводится автоматически по сигнала формирователей 5 амплитуды и длительности 7 сигнала управления, по тупающим на первый 6 и второй 8 бл ки реле, причем срабатывание того или иного реле в каждом из блоков определяется соответственно значениями А1 для первого блока 6 реле Ъ:, для второго блока 8 реле. Особенность срабатывания реле в первом 6 и втором 8 блоках реле по указанным сигна,лам от формирователей 5 амплитуды и длительности 7 сигнала управления состоит в том что их количество в данный момент времени может отличаться друг от друга, т. е. при одной и той же амплитуде А (, ( К 1 ), вызывающей сраба тывание К-того реле в первом блоке 6 реле, К-тое реле второго блока 8 реле может не сработать, т.е. не передать команды на блок 9 коррекции сигнала управления, есл где к длительность сигнала амплитуды А1 ; to значение времени настройки данного устро ства на режим переключения органов системы. Выбор величины Г(5определен двумя, по крайней мере, факторами: значением С.,,, и величиной где Tj,, характеризует быстродействие регулирующего органа, aT onределяется допустимой ошибкой регулирования iV и скоростью ее изменения V при максимальном возмущении F (t) так, что ,„,.„ и . Данное условие (т. е. выбор конкретного значения То ) срабатывания реле первого блока 6 реле и реле второго блока 8 реле в устройстве является своего рода фильтром, сглаживающим высокочастотные (мгновенные) колебания внешних возмущений, которые в известных системах отрабатываются по сигналам датчика 1 регулируемого параметра регулирующими органами блока 10, технически неоправданно в этом случае расходующими свой ресурс, что снижает эксплуатационные характеристики и надежность системы в целом. Таким образом, в зависимости от соотношений между сигналами А, и формирователей 5 амплитуды и длительности 7 сигнала управления в устройстве формируется релейно-пропорциональный сигнал управления, определяющий режим работы и включение того или иного количества реле в первом 6 и втором 8 блоках реле, что соответствующим образом изменяет режим работы блока 2 формирования закона регулирования (по сигналам первого блока 6 реле) и формирование коррекции блоком 9 коррекции сигнала управления (от второго блока 8 реле) и, в конечном итоге, определяет количество и режим работы в устройстве регулирующих органов блока 10, что и определяет достижение поставленной цели изобретения. При этом в блоке 2 формирования закона регулирования по сигналам первого блока 6 реле формируется значение сигнала на соответствующий перевод К-того регулирующего органа и положение FQ, а с помощью второго блока 8 реле и блока 9 коррекции сигнала управления осуществляется подключение регулирующих органов блока 10 для реализации зависимости (1) с учетом фильтрации мгновенных колебаний внешних возмущений F(t) и зависимости (2). Из фиг. 2 следует, что до момента времени предлагаемом устройстве, в отличие от известных, работает только один (первый) регулирующий орган 11 в пропорциональном режиме управления от блока 2 формирования закона регулирования. При этом величина его компенсирующего воздействия для парирования F (t) близка к значению FQ, При первый орган блока 9 коррекции сигнала управления . переводится в режим релейнот-о управления-со значением отключается от блока 2 формирования закона регулирования. При tntg (ког да наблюдается дальнейшее возрастан возмущения F(t) ) происходит включение в работу второго регулирующего органа 12, а при t-t -третьего регулирующего органа 13. При этом регулирующие органы 11 и 12 не имеют управления от блока 2 формирования закона регулирования и развивают свои номинальные (спецификационные) значения FQ до момента, времени t, а регулирующий орган 14 находится в режиме пропорционального управления от блока 2 формирования закона регулирования и отключается при t-t, где в свою очередь регулирующий орган 13 переводится в режим пропорционального управления, компенсируя динамические изменения возмущения F(t). Из фиг. 2 становится ясным порядок под ключения и отключения регулирующих органов устройства при совместной работе в устройстве формирователей 5 амплитуды и длительности 7 сигнала управления первого 6 и второго 8 .блоков реле, а также блока 9 коррек ции сигнала управления, реализующих зависимость (1). Причем это первое отличие предл гаемого устройства от известных. Второе отличие предлагаемого устройства в том, что при (фи когда регулирующие органы 11 и 12 развивают в сумме компенсирующее в действие 2Ро , а возмущение F(t) этом уменьшается, регулирующ,ий орг 13 изменяет направление своего воз действия, компенсируя избыточность воздействия 2Fo от регулирующих ор ганов .11 и 12. Такой режим работы устройства (с переменной знака воз действия только у одного из органов, находящегося в данный момент времени в режиме пропорционального управления) также направлен на повышение надежности работы системы регулирования. Технико-экономическая эффекивность изобретения заключается в повышении надежности работы предлагаемого устройства и как следствие этого - исполнительных средств судна, используемых за время похода для регулирования курса, а также в экономии энергии управления, необходиой для осуществления указанного регулирования. Формула изобретения Устройство для формирования релейно-пропорционального сигнала управления, содержащее первый и второй блоки реле, датчик регулируемого параметра, выход которого соединен с первым входом блока формирования закона регулирования, усилитель мощности, первый и второй входы которого соединены соответственно с выходами блока формирования закона регулирования и блока обратных связей, вход которого и- выход усилителя мощности подключены к блоку регулирующих органов, отличающеес я тем, что, с целью повышения на-дежности устройства, оно содержит блок коррекции сигнала управления, формирователь амплитуды и длительности сигнала управления, причем выход блока обратных связей через последовательно соединенные формирователь амплитуды сигнала управления и-первый, блок реле подключен ко второму входу блока формирования закона регулирования, а через последовательно соединенные формирователь длительности сигнала управления, второй блок реле и блок коррекции сигнала управления - к третьему входу усилителя мощности. Источники информации, принятые во внимание при экспертизе 1.Патент ФРГ №. 1588583, кл. G 05 В 9/02, 1972. 2.Патент Японии № 50-12072, кл. 54 (7) В 1, 21.10.70.
F{t)
Fit
тял


| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1983 |
|
SU1102869A1 |
| Способ определения прямых показателей качества регулирования промышленных автоматических систем | 1988 |
|
SU1580323A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ВНУТРЕННЕЙ ЕМКОСТНОЙ ЭНЕРГИЕЙ ОБЪЕКТА С ПЕРЕМЕННЫМИ ПАРАМЕТРАМИ | 2010 |
|
RU2474857C2 |
| Система стабилизации объекта с присоединенным упругим элементом переменной жесткости | 1988 |
|
SU1603340A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2016 |
|
RU2628757C1 |
| Система регулирования | 1977 |
|
SU732824A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
| Устройство для регулирования температуры ваграночного дутья | 1985 |
|
SU1314213A1 |
| Система автоматического регулирования выпарного аппарата | 1985 |
|
SU1277982A1 |
ii
4 5 te
7 иг.2
