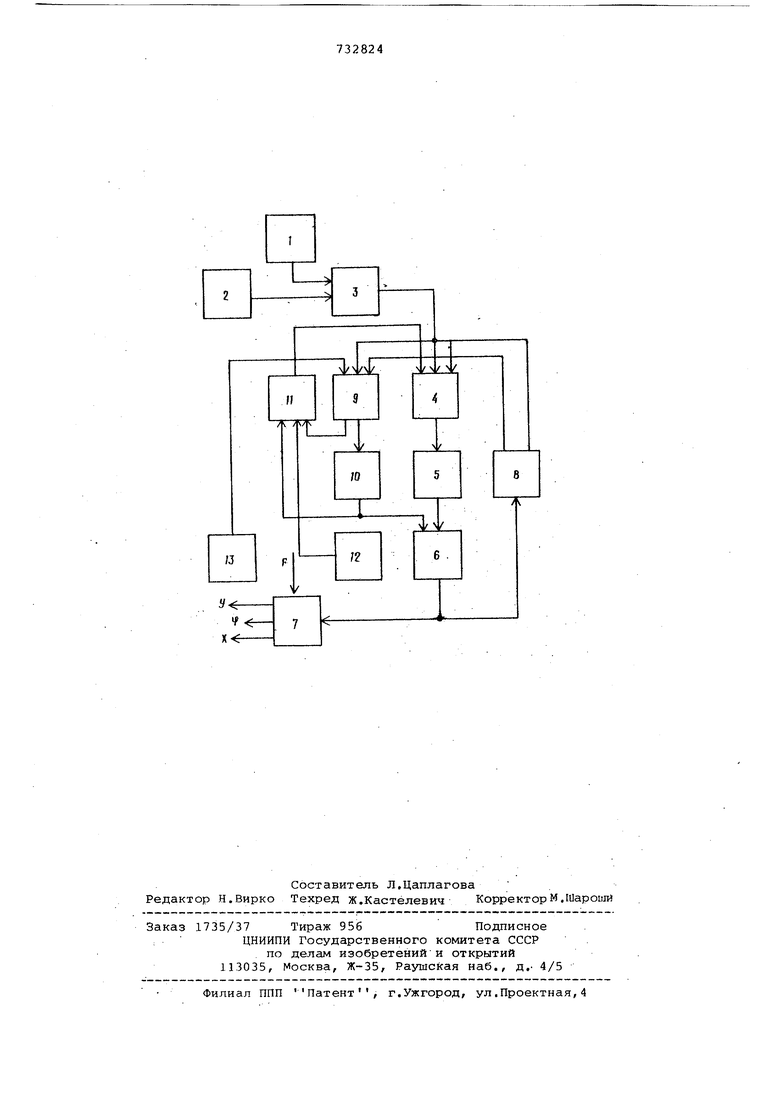
(54) СИСТЕМА РЕГУЛИРОВАНИЯ Изобретение относится к судовой автоматике и может быть использована, например, в устройствах и систеMak автоматического управления объек тами, имеющими несколько регулирующих органов, в частности для стабили зации в открытом море курса судна при неуправляемом его дрейфе в горизонтальной плоскости под действием возмущений от ветра и течения,. Известна система автоматического управления, в которой предусматривается применение в цепи обратной связи интегрирующего конденсатора для изменения величины сигнала обратной связи с целью компенсации на руле несимметричных нагрузок 1. Однако для инерционных объектов регулирования, например судов без хода, практически невозможно аппаратурно реализовать цепь с интегрирующим конденсатором для больших постоянных времени процесса регулирования. Наиболее близкой к изобретению является система автоматического регулирования, в которой устраняются нежелательные колебания курса судна без хода от воздействия волнения путем включения дополнительных фильтров в цепь формирования управляющих сигналов, содержащую первый элемент сравнения, первый блок формирования управляющего сигнала, усилитель и блок регулирующих органов, подключенный через датчик обратной связи ко второму входу первого блока формирования управляющего сигнала, датчик и первый задатчик и блок выбора регулирующего органа 2. Однако при произвольном изменении курсовых углов максимальных возмущений от ветра и течения система не обеспечивает заданной точности стабилизации при максимальной мощности всех винтов регулируемого шага и ко.лонок, имеющихся на судне Для создания стабилизирующего момента по курсу. Целью изобретения является повышение точности системы. Поставленная цель достигается тем, что система содержит последовательно соединенные второй задатчик и второй блок формирования управляющего сигнала и последовательно соединенные третий задатчик и второй элемент-сравнения, второй вход которого соединен с выходом первого элемента сравнения. третий вход - со вторым выходом датч ка обратной связи, первый выход со входом блока выбора регулирующего органа, а второй выход - со вторьам входом второго блока формирования управляющего сигнала, третий вход которого подключен к выходу блока выбора регулирующего органа, а выход - к третьему входу первого блока формирования управляющего сигнала. На чертеже представлена блок-схема системы, которая содержит датчик 1 и первый задатчик 2 регулируемого параметра, например курса судна без хода, соединенные со входами первого элемента сравнения 3, подключенного через первый блок 4 формирования управляющего сигнала и усилитель 5 к блоку б регулирующих органов, состоящему из ряда регулирующих органов типа винта регулируемого шага и рулевой движительной колонки, воздействующих на судно 7, чтобы стабилизировать заданное значение курс . в условиях неуправляемого изменения параметров продольного (X) и поп речного (У) дрейфа судна под воздействием возмущения F, Информация о состоянии регулирующих органов через датчик 8 обратной связи поступае на вход блока 4 формирования управляющего сигнала. Система также содержит второй элемент сравнения 9, подключенный через блок 10 выбора регулирующего органа одновременно ко зходу второго блока 11 формирования управляющего сигнала, который также подключен ко второму задатчику 12 и ко вт рому элементу сравнения 9, а выход блока 11 соединен с первым блоком 4 формиров-ания управляющего сигнала, второй элемент сравнения 9 подключе к третьему задатчику 13. Система регулирования работает следующим образом. С датчика 1 сигнал истинного значения пегулируемог параметра, например курса судна без хода при неуправляемом дрейфе в открытом море, поступает на первый вход элемента сравнения 3, на вто. рой которого для выработки сиг нала отклонения подается с задатчика 2 требуемое значение параметра регулирования. Сигнал отклонения, с элемента сра нения 3 поступает в блок 4 для формир11йания в соответствии с принятым алгоритмом управления сигнала, соде жащего в общем случае также составляющие производной и интеграла. Управлякяяий сигнал с блока 4 через ус литель; 5 воздействует на блок б, ко рый вырабатывает требуемое значение мс 4ента стабилизации параметра f пр изменяющихся под действием возмущения F параметрах X и Y. Величина и направление этого момента стабилиза ии контролируются в системе датчиком братной связи, сигналы с которого оступают на второй вход блока 4, беспечивая тпебуемое качество стаилизации при одновременной работе сех регулирующих органов блока б. В предлагаемой системе автоматиеского регулирования разработан новый ринцип использования регулирующих рганов блока 6, обеспечивающий достижение заданной точности стабилизации параметра Ч при всех значениях возмущения F до ° всем диапазоне его .углов встречи с судном. Причем, в соответствии с поставленной целью изобретения точность стабилизации параметра f достигается путем соответствующего дополнительного управления работой блока б при уменьшении потребляемой его органами энергии. Это обеспечивается путем формирования в системе двух взаимосвязанных во времени по следовательных управляющих воздействий, вырабатываемых элементом сравнения 9., блоками 10, 11 с использованием двух опорных сигналов от задатчиков 12, 13 и сигналов, формируемых в блоках 3, 4, 5, 8. Первое управляющее воздействие формируется в цепи, .состоящей из элемента 9 и блока 10, с выхода которого снимается сигнал на второй вход блока б. Формирование этого управляющего воздействия обусловлено решением следующей логической задачи включения в работу органов блока б: о-при, ДЧ..ДЧ 1-j.-l,2- .. N upu, дЧ1.,дч К М, где . последовательность сиг налов на включение (к + 1)-га блока 6 при работе в данный момент времени всех (К-1+i) органов по стабилизации параметра Ч ; значение ошибки стабилизации при работе всех предыдущих органов; заданное значение ошибки; N - число всех органов, имеющихся на судне 7 в блоке б для стабилизации параметра Ч . Значение ошибки лМ, формируется в элементе сравнения 9 с учетом сигнала, поступакяцего со второго выхода датчика 8 обратной связи, соответственно по числу (к - 1) включенных в данный момент времени органов управления блока б, и сигнала текущего, значения ошибки дЧ с элемента ::равнения 3. Этот сигнал f. поступает в блок 10 и сопоставляется с величиной желаемой (заданной) ошибки 1 устанавливаемой в задат чике 13. При лЧк.-i 3 выходе блока 10 сигнал управления отсут. ствует, что означает , и включения нового (к-го) органа не произ водится . При этом одновременно с второго выхода элемента 9 на блок 1 поступает сигнал запрет, блокирующий выходной сигнал с этого блока на блок 4 формирования управляющего сигнала. Указанная работа блоков 9, 10 и производится до полного включения в работу имеющихся органов, когда Если пои этом также не выполняется условие ,, , то с выхода эле мента сравнения 9 на блок 11 поступ ет сигнал, разрешающий работу системы по второму (из двух последо вательных управляющих воздействий) управляющему сигналу уже с блока 11 Этот второй управляющий сигнал формируется в блоке 11 с учетом выходного сигнала блока 10 и опорного .сигнала с задатчика 12. Величина выходного сигнала блока 11 ойределяется уставкой задатчика 12, а его знак (плюс или минус) зависит от фазы разрешающего сигнала с эле мента 9, Поступая на третий вход блока 4, управляющий сигнал блока 11, пройдя через блоки 5, 6 вызовет разворот в горизонтальной плоскости рулевой движительной колонки, что приведет к появлению продольной составляющей упора колонки навстречу составляющей Р, Разворот колонки формируется датчиком обратной связи путём подачи на блок 4 соответствующего сигнала обратной связи и заканчивается, как только начнет выполняться условие лЧ. йЬ.Ч по команде с выхода элемента сравнения 9. После этого система вновь возвращается к оаботе по оценке условия (1), отключая последовательно с N N - 1 органы управления блока б, т.к. один opraf а именно рулевая движительная колонка, уже участвует в создании момента стабилизации курса на своем угле разворота $ . В случае изменения возмущения F в сторону уменьшения (в т.ч. и до нуля,с изменением знака) система возвращает органы блока 6 в исходное состояние (или изменяет знак создаваемых ими упоров) в последовательности, обратной выше указанной, т.е. вначале; колонка возвращается i положение d 0, а затем последовательно отключаются (включаются с другим знаком) остальные органы блока б при непрерывном контролировании выполнения условия ДЧ Af, Таким образом, систома обеспечивает стабилизацию паоаметра с заданной точностью при одновременном уменьшении энергии, потребляемой блоком регулирующих органов fi для кс «пенсации внешнего возмущения F. Формула изобретения Система регулиоования, содержащая последовательно соединенные первый элемент сравнения, первый блок формирования управляющего сигнала, усилитель и блок регулирующих органов, подключенный через датчик обратной связи ко второму входу первого блока формирования управляющего сигнала, датчик и первый защатчик, выходы которых соединены соответственно с первым и вторым входами первого элемента сравнения, блок выбора регулирующего органа, выход которого соединен со вторым входе блока регулирующих органов, отличающаяся тем, что, с целью повышения точности системы, она содержит последовательно соединенные второй задатчик и второй блок формирования управляющего сигнала и последовательно соединенные третий эадатчйк и второй элемент сравнения, второй вход которого соединен с выходом первого элемента сравнения, третий вход со вторым выходом датчика обратной связи, первый выход - со входом блока выбора регулирующего органа, а второй выход - со вторым входсм второго блока формирования управляющего сигнала, третий вход которого подключен к выходу блока выбора регулирующего органа, а выход - к третьему входу первого блока формирования управляющего сигнала. Источники информации, принятые во внимание при экспертизе 1.патент Франции 2110570, кл. G 05 D 1/00, опублик. . 2.Патент Великобритании 1342252, кл. G 05 D 1/00, опублик, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования релейнопропорционального сигнала управления | 1977 |
|
SU696406A1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| Система управления | 1977 |
|
SU938252A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА | 2000 |
|
RU2171204C1 |
| Способ управления судном в режиме без хода | 1978 |
|
SU766958A1 |
| Система стабилизации полупогруженного плавучего средства | 1981 |
|
SU958220A1 |
| Авторулевой | 1979 |
|
SU842725A1 |
| Регулятор | 1977 |
|
SU648941A1 |
| Устройство для автоматической стабилизации судна с буксируемой сейсмопьезокосой на заданной траектории | 1978 |
|
SU744484A1 |
| Позиционный регулятор | 1975 |
|
SU534755A1 |