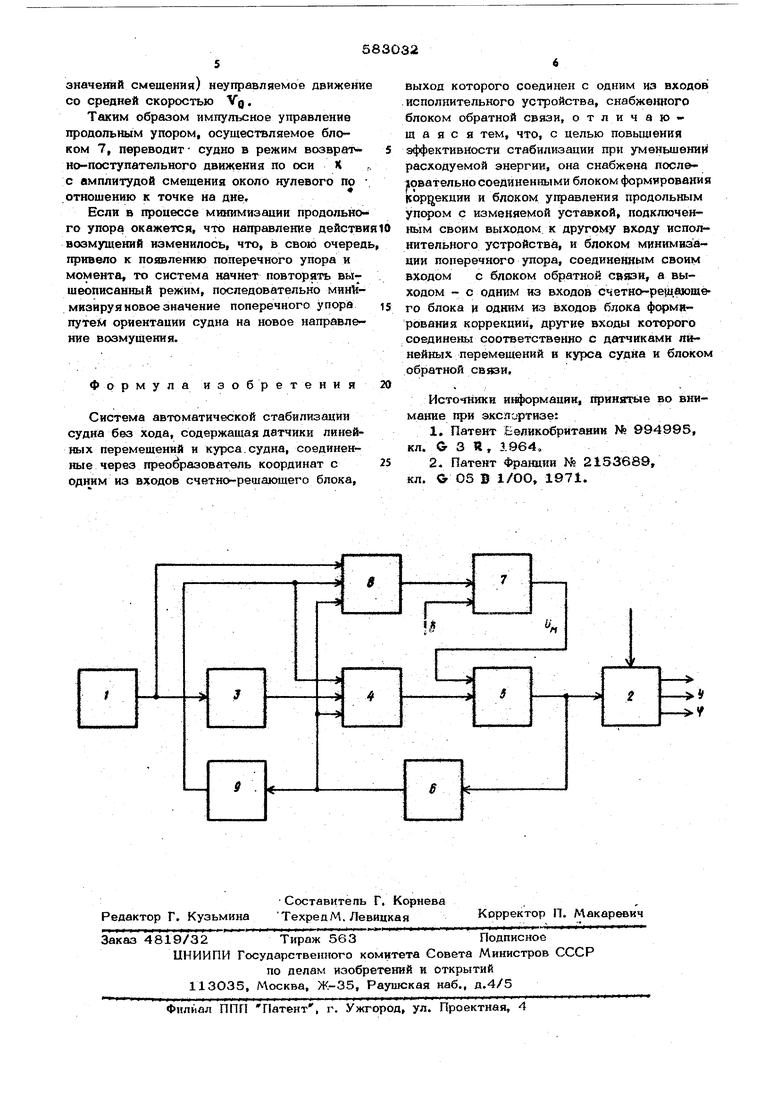
ока формирования коррекции другие входы которого (Соединены соответственно с датчиками линейных леремешений и курса судна tf блоком обратной связи. о На чертеже представлена функиионал1г пая схема системы. Система содержит датчики 1 и 2 линейных перемещений и курса судна, соединенные через преобразователь 3 координат о одним из входов счетно -решаюшегр блока 4 выход которого подключен к одному из входов испол тительного устрой ства 5, снабженного блоком 6 обратной связи. К другому входу исполнительного Зготройства подключен 7 утфавлений продольным упором с изменяемой уставкой, Вход которого соединен с выходом блока 8 формирования коррекции, входы которого со динёны соответственно с выходами блока 6 датчиков 1 и выходом блока 9 минимнзации поперечного упора, вход которого подключён к выходу блока 6 обратной связ Система работает следующим образом. В счетно-решакнцем блоке 4 по сигнала перемещения судна и отклоненийпо курсу отдатчиков 1, формируется сигнал управле ния работой исполнительного устройства 5 по созданию требуемых упоров и моментов компенсирующих влияние внешних возмушений ток, чтобы отклонения судна в продоль ной, поперечной плоскостях и по курсу был бы минимальным. В случае длительного гфебывания судн в районе проведения работ при наличии пос Tosaite x или медленно меняющихся возмушений, устройство 5 постоянно расходует мощность по созданию упоров в продольной и поперечной плоскостях судна и момента относительно вертикальной оси, проходящей через центр тяжести судна. И:{формаиия о величине и направлении указанных упоров и моментов вырабатывае ся в блоке 6 обратной связи и вводится в счетно-решающий блок 4 для формирован сигналов управлетш работой ; устройства 5 При этом установившиеся значения указан№ |х величин служит мерой внешних возмушекмй. Минимииацня росходуемой устройством 5 мощности по соадйнию соответствующ упоров и моментов осуи1ествляется в два этапа. На первом этапе мшшмиаируетсг попер упор, данные о котором с блока 6 пос пают на вход блокп 9, где сравниваются с уставкой, опррдолякпцсй желаемое из усл вий эксплултоиин судип ( в том число и irynonOO ЗНПЧРНИр) МИМНМОЛ1.ИОГО ynoprt в поперечной плсх;кости. Сигнал /рассогласования между текущим начением поперечного упора и его минимальным значением поступает на один из входов блока 4, который выдает команду устройству 5 на разворот судна 2 по курсу в сторону уменьшения поперечного упора путем ориентации носа судна 2 в направлении возмущения. На втором -этапе, когда закончена ориентация судна ь направлении возмущения, система с помощью блоков 8 и 7 осуществляет формирование импульсного управления продольным упором с целью минимизации расходуемой устройством 5 мощности по созда нию этого упора. На входы блока 8 поступают сигналы от блока 9 и датчиков 1, а также ве/шчина установивщегоЬя значения продольного упора с блока 6, По этим сигналам в блоке 8 формируется сигнал коррекции, поступающий затем на вход блока 7, с изменяемой уставкой, значение которой определяется условиями эксплуатации судна и зависит от глубины места работы. В блоке 7 сигнал коррекции от блока 8 модулируется тактовыми импульсами с периодом, равным времени tu t за которое происходит продольное смещение судна по оси X при. воздействии максимального |возмущения. Эти импульсы сдвигаются на 1величину Cj и формируют последовательность импульсов с амплитудой длительностью t и периодом следования Т К.- 9, где К - коз(ффициент пропорциональности; ij - величина установки в блоке 7. Значение Т определяется для конкрет ного судна и физически означает упреждение сигнала tf с целью компенсации инерционных свойств судна тфи его неуправляемом движении под действием внешних возмушений. Величина Т выбирается из условия разгона судна со скоростью Vcp V -- ,где Ve - установившееся значение скорости движения по оси X неуправляемого судна. Исходя из этого, сигнал управляет устройством 5 по созданию импульсного продольного упора длительностьк) TQ , под действием которого судно от положения равновссия начипаст движение по оси К на величину продольного смешения f средней скоростью - ,причем при смешеиик судно останавливается (V о) так как а;зканчивается действие продольного импульсного упора, после чего под действием вношннх позмушепий оно начнн. обратной (в сторону отгигцательных значений смешения) неуправляемое движени со средней скоростью VQ , Таким образом импульсное управление продольным упором, осуществляемое блоком 7, переводит- судно в режим возврат но-поступательного движения по оси Ч с амплитудой смещения около нулевого по отношению к точке на днв. Если в процессе минимизации продольного упора окажется, что направление действи возмущений изменилось, что, в свою очеред привело к появлению поперечного упора и момента, то система начнет повторять вы шеописанный режим, последовательно минимизируя новое значение поперечного ynopia путем ориентации судна на новое направление возмуШения, Формула изобретения Система автоматической стабилизации судна без хода, содержащая датчики линейных перемещений и курса.судна, соединенные через преобразователь координат с одним нз входов счетно-решающего блока. выход которого соединен с одним из входов исполнительного устройства, снабженного блоком обратной связи, отличающаяся тем, что, с целью повышения эффективности стабилизации при уменьшении расходуемой энергии, она снабжена посл&зювательно соединенными блоком формирования |сор1 екции и блоком управления продольным с изменяемой уставкой, подключенным своим выходом к другому входу исполнительного устройства, и блоком минимизации поперечного упора, соединенным своим входом с блоком обратной связи, а выходом - с одним из входов счетно-рещающего блока и одним из входов блока формирования коррекции, другие входы которого соединены соответственно с датчиками яйнейнь1Х перемещений н курса судна и блоком обратной связи. ИстоШнки информации, принятые во внимание при экспортизе: 1.Патент Великобритании № 994995, кл. G 3 R, 1964, 2.Патент Франции № 2153689, кл. О О5 В 1/00, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1977 |
|
SU648941A1 |
| Система регулирования | 1977 |
|
SU732824A1 |
| Устройство для формирования релейнопропорционального сигнала управления | 1977 |
|
SU696406A1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| Способ управления судном в режиме без хода | 1978 |
|
SU766958A1 |
| Устройство для управления положением бурового судна | 1976 |
|
SU753715A1 |
| Устройство для формирования сигнала управления | 1976 |
|
SU624200A1 |
| Автоматическая система управления силовым приводом судового руля | 1983 |
|
SU1102715A2 |
| Устройство для стабилизации положения бурового судна | 1974 |
|
SU574703A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
