Изобретение огносигся к области автоматического регулирования и может быть использовано, например, в система автоматического управления курсом суп- на в случае наличия на нем нескольких исполнительных устройств, состав и режим работы которых зависит от ряда факторов, в том числе от величины внешних возмущений, яействуклцих на судно в виде ветра, волнения и течении.
Известен .авторулевой регулятор, в котором с целью улучшения эксплуатационных характеристик датчик курса дополнительно соединен с усилителем мощности через блоки, формирующие зоны нечувствительности по отклонению курса и его производной lj .
Однако одновременное использование для стабилизации курса всех имеющихся на судне исполнигельных устройств (подруливающих носовых устройств и кормовых колонок) ведет к излишней затрате энергии и моторесурса этих исполнительных устройств. Кроме того, вследствие
релейного характера введения от дополнительных блокой Сигналов коррекции, исполнительные устройства находятся в неблагоприятном режиме работы, что снижает их срок Службы.
Наиболее близким по технической сущности к изобретению является регулятор, содержащий последовательно соединенные измеритель рассогласования, вычислительный блок и усилитель мощности, выход которого соединен с входами исполнительных блоков, выходы которых соединены с входами соответствующих датчиков обратной связи, а их выходы подключены к соответствующим входам вычислительного блока Т2 ,
Однако эти устройства в условиях штительной эксплуатации из-за принятого принципа формирования сигналов управления работой движителей расходуют значительную энергию и ресурс в условИ5гх действия максимальных внешних сил и не обеспечивают требуемой точноо ти стабилизации при малых внешних воэдействиях наличия зоны ршчувсгвнгельносги и пропорциональности развиваемого движигеля.и стабилизирующего момента, Ручное отключение ряда движителей и перевод оставшейся группы в режкм; максимального создания момента с целью снижения расходуемой мощности я обеспечения требуемой точности яв ляется в устройстве неэ4фектйвным, вследствие несовпадения во времени данных об изменении курса от гирокомпаса и информации о внешних силах от датчиков ветра и течения
Целью изобретения является улучшение эксплуатационных характеристик и снижение энергозатрат регулятора.
Это достигается тем, что регулятор содержит последовательно соединенные ИСТОЧНИК опорного сигнала, компаратор, фун а1иональный усилитель и блок коммутации, выход которого соединен с вторыми входами исполнительных блоков, причем второй вход компаратора подключен к измерителю рассогласования, выход - к второму входу блока коммутации, а выход датчиков обратной связи соединен с соответствующими входами фун1шионального усилителя.
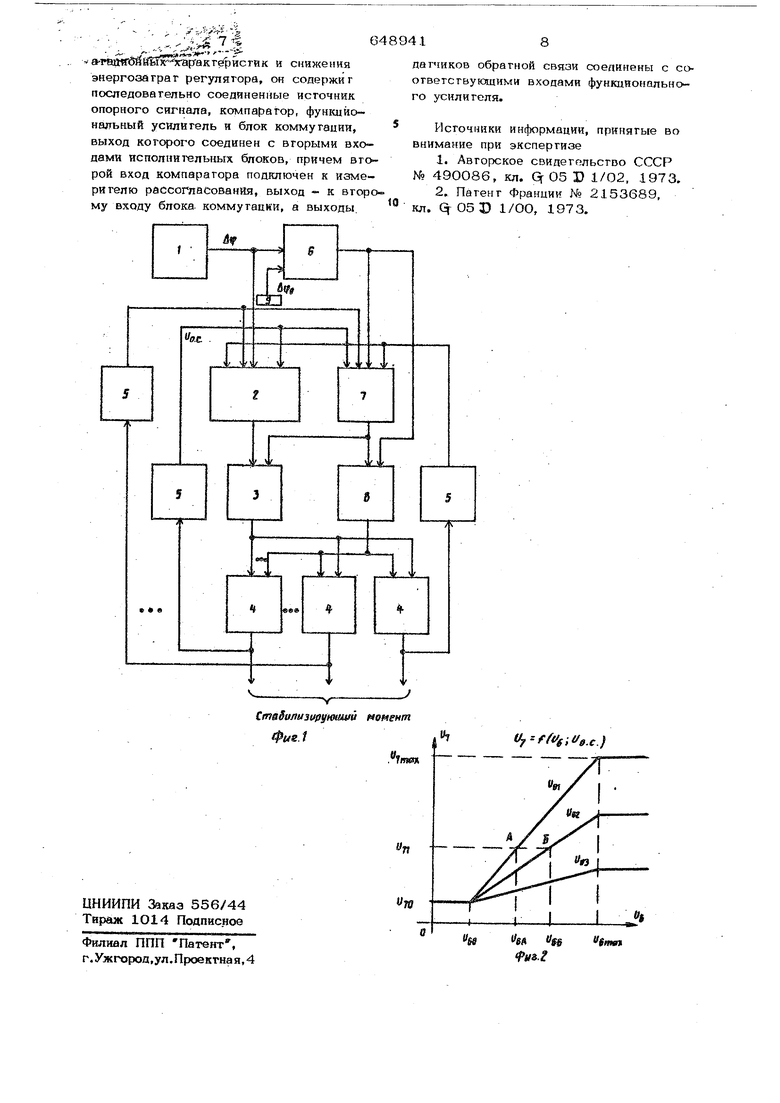
На фиг, 1 представлена блок-схема регулятора на фиг. 2 приведены зависимости выходного сигнала функционального усилителя от значения сигнала, выработанного компаратором с регулируемым выходным сигналом, и сигнал с датчика обратной связи.
Регулятор содержит измеритель рассогласования 1, соедннанрштй. с вычислительным блоком 2, выход которого через усилитель мощности 3 подключен к входам исполнительных блоков 4, соединенных через соответствующие датчики обратной связи 5 с другими входами вычислительного блока 2.
Регулятор также содержит последовательно соединенные компаратор 6 с регулируемым выходным сигналом, функциональный усилитель 7 режима работы и баок 8 коммутации;причем первый вход компаратора б подключен одновременно к измерителю рассогласования 1, второй его вход Соединен с источником опорного сигнала 9, а выход одновременно подключен к второму входу блока 8, выход усилителя 7 одновременно подсоединен к второму входу усилителя 3, а другие входы усилителя 7 подключены к соответствующим датчикам 5 обратной связи
Препставленные на фиг. 2 зависимо ти вица и-j i (,UQ) характеризуют величину выходного сигнала IJ- усилителя 7 как функцию выходного сигнала Ц компаратора 6 и текущего значения сигнала1Г0(, с датчика 5 обратной связи. Причем, максимальное значение сигнала бШОН определено значением сигнала с измерителя рассогласования 1, обусловленного максимальным внешним воздействием, а минимальное значение If 5 л определено допустимой из условий эксплуатации ошибкой регулируемого параметра.
Регулятор работает следующим образом twa примере стабилизации курса судна с носовыми и кормовыми группами технических средств (исполнительными блоками) типа винт регулируемого шага в трубе и движительно-рулевая ко..noHKa..
Измеренные измерителем рассогласования 1 отклонения Д(р регулируемого курса поступают в вычислительный блок
2, где масштабируются, дифференцируются, суммируются с Сигналами обратной связи11о. с датчиков 5 обратной связи и в соответствии с алгоритмом управ, пения через усилитель 3 мощности поступают на исполнительные блоки 4 судна указанного типа, которые развивают требуемый из условий точности стабилизации момент, противодействующий моменту внешних возмушений.1
Так как вероятность максимальных возмущений в течение всего временя эксплуатации судна в заданном районе рабог оказывается сравнительно небольшой, то при одновременной работе испотиительных блоков 4 при пропорциональном изменении развиваемого ими момента (как это имеет место в известных устройствах) не обеспечиваются требуемые эксплуатационные характеристики системы и наблюдаются неоправданные расходы энергии при работе носовых и кормовых групп движителей.
Для устранения этого в предлагаемом регуляторе предусмотрено автоматическое включение требуемого в данный момент стабилизации состава исполнительных блоков и определение режима его работы с помощью введенных в систему 6 с регулируемым выходным сигналом функционального усилителя 7 режима работы и блока 8 коммутации исполинтельных блоков 4 судна, в данном случае носовых винтов регулируемого шага и кормовых движигепьных колонок. Авгомагическое переключение состава исполнительных блоков 4 и выбор режима их работы производится по сигналам функционального усилителя 7, вид которых в случае двух носовых и двух кормо вых движителей предстаачен на фиг. 2-е учетом зависимости от сигнала с компаратора 6. Однозначность выходного сигнала U формируемого усилителем 7 для установления требуемого режима работы, обеспе чивается введением связей с датчиков 5 обратной связи на усилитель 7, и кроме того, с компаратора6 для выбора соответствующих блоков 4. Это достигается тем, что в усилителе 7 решается функциональная зависимостьIf UYltrocJ-UilAV где KjltJoc) - коэффициент усиления. зависящий от значения в данный момент времени сигнала обратной связи UQCI UtfuCp - сигнал компаратора 6 пропор циональный разности Д ip г ({) Афо . где Д (р (t)- текущее отклонение курса, заданное (от источника опорного сигнала) желаемое (из условий эксплуатацйн) значение ошибки стабилизации курса судна. Решение указанной функциональной зависимости в усилителеле 7 по воляет избежать в предпагаемой системе ложного переключения блоков 4, что возможно (см, фиг, 2), например, при одном и том же значении выходного сигнала H-j . дпя двух различных значений сигналаUu и 11 в точках А и Б на соответстбукядих кривых сигнала HY , обозначенных U Qj например, для трех значений сигнала обратной связи UQC , ПрИЧемИд, -iljQj OS при этом кривая ТГ соответствует мень шему числу одновременно работающих технических средств, чем кривые 1Го2 ТГо5 Например, характеристика усилителя 7 находится в данный момент вре мени на кривой , где режим работы исполнительного блока 4 обусловлен значением сигнала и71 и величиной Ц/. , а затем произошло такое изменение сигнала 11 jg , вызванное действием на судно более мощных возмущений, что возникла ситуация переключения усилителя 7 с кривой ITpji на кривую1Го2 «s соответственно переход к более мощной группе исполнительных блоков 4 с тем же режимом их работы, что и в исходный момент, с целью компенсации возросшего внешнего возмущения. Такого перектючення в регуляторе не произойдет до того момента времени, пока выполняется нераBeHCTBoK fDojl i MUoaltJumaK KT), оцениваемое усилителем 7. Если это неравенство не выполняется, происходит пе реключение характеристики усилителя 7 на кривую Uo2 посредством блока 8, получившего новый -сигнал, подключение новых блоков 4 к тому, составу, имел место в исходный момент времени. Для приведенного на фиг. 2 случая при изменении сигнала компаратора 6 с Ибд на TJtt характеристика усилителя 7 с кривой UQJ п еключается на кривую 02, -к. (02)601014 т.е. не выполняется вышеуказанное неравенство. В результате осуществлявгея такая насфойка блоков 6, 7, 8, что при отклонениях курса от заданного з пределах Д{Й i Д(д обеспечивается работа минимального состава требуемых блоков 4 (например, один носовой винт в трубе или одна кормовая колонка) в соответсгвии с кривой и JJ. на фиг. 2. Подалючение блоков 4 осуществляется в системе в последовательности, обратной выщеука- занной, если в процессе стабилизации судна его отклонения по курсу изменяются в сторону уменьшения. Таким образом, предлагаемый регулятор осуществляет в процессе своей работы непрерывный контроль соответсувкя состава и режима работы технических средсгв из условня требуемой точности измеЕ ения регулируемого параметра при переменных внешних возмущениях, . переводит их в режим работы по вызову. Это, в отличие от известных ус тройств t приводит к улучшению эксплуатационных характеристик системы в целом и экономии энергии, потребляемой техническими средствами з процессе работы. Формула изобретения Регулятор .„содержащий поеледователt но соединенные измеритель рассогласования, вычислительный блок и усилитель мощности, выход которого соединен с входами соответствукщнх датчиков обратной связи, выходы которых подключены к соответствующим входам вычислительного блока, отличающий- с я тем, что, с целью улучшения эксплу
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Способ управления судном в режиме без хода | 1978 |
|
SU766958A1 |
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| Система автоматической стабилизации судна без хода | 1976 |
|
SU583032A1 |
| Устройство для формирования релейнопропорционального сигнала управления | 1977 |
|
SU696406A1 |
| Система регулирования | 1977 |
|
SU732824A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ | 2004 |
|
RU2248914C1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
