(54) ПРИВОД РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| КИНЕМАТИЧЕСКАЯ ПЕРЕДАЧА | 1991 |
|
RU2037700C1 |
| ПРИВОД ДЛЯ ИНСТРУМЕНТА ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2014 |
|
RU2570939C1 |
| Промышленный робот | 1981 |
|
SU1057267A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2010 |
|
RU2446322C2 |
| Манипулятор | 1978 |
|
SU874330A1 |
| Промышленный робот | 1982 |
|
SU1108005A1 |
| Устройство перемещения держателя оптического элемента | 1984 |
|
SU1229713A1 |
| БЛОК РУЛЕВЫХ ПРИВОДОВ | 1999 |
|
RU2154593C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
Изобретение относится к средствам автоматизации и может быть использовано в промышленных роботах.
Известен привод механической руки робота, содержащий силовые цилиндры, механические передачи и компенсирующий механизм ij.
В этих приводах компенсирующий механизм выполнен в виде дифференциалов, включающих в себя большое число слож- ных подвижных элементов, что усложн ет конструкцию и увеличивает вес потвнжных элементов.
Цель изобретения - упрощение конструкции привода и уменьшение веса подвижных элементов.
Для этого компенсирующий механизм выполнен в виде суммирующей косозубой реечной передачи, зубчатые колеса которой кинематически связаны со звеньями робота и между собой.
Рейка установлена с возможностью перемещения.
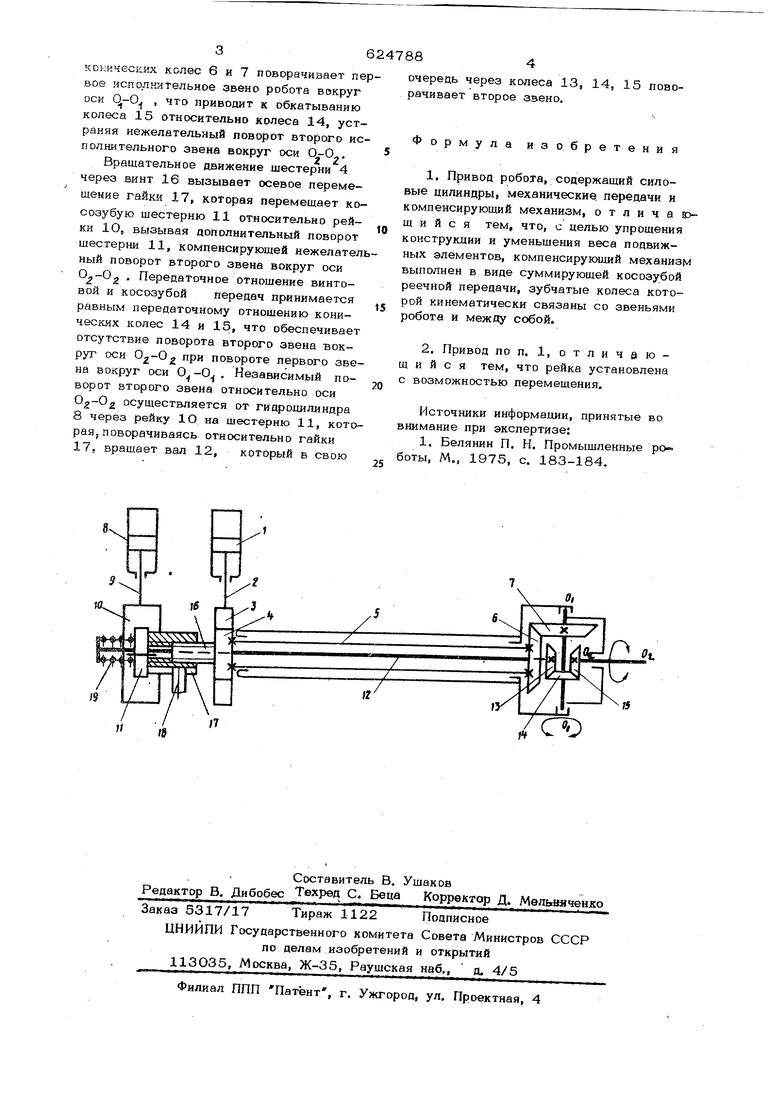
На чертеже дана кинематическая схема описываемого привода.
Привод первого исполнительного звена робота с поворотом вокруг поперечной оси О -0 состоит из силового цилиндра 1, шток 2 которого жестко соединен с рейкой 3, шестерни (реечного колеса) 4, полого вала 5, конических колес 6 и 7.
Привод второго (исполнительного) звена робота с поворотом вокруг продольной оси Оя-О-содержит силовой цилиндр 8, соединенный штоком 9 с косозубой рейкой 1О, косозубую щестерню 11, внутренний вал 12, конические колеса 13, 14 и 15. Колесо 14 сидит свободно относительно оси О-О поперечного вала.
Компенсирующий механизм состоит из винта 16, жестко соединенного с шестерней 4, гайки 17, фиксатора 18, исклю чающего поворот гайки, и пружины 19, поджимающей косозубую шестерню 11 к гайке 17, и представляет собой суммирующую косозубую реечную передачу.
При перемещении поршня силового цилиндра рейка 3 поворачивает шестерню 4, которая через полый вал 5 и пару конических колес 6 и 7 поворачивает пе вое исполнительное звено робота вокруг оси Ц-О , что приводит к обкатыванию колеса 15 относительно колеса 14, устраняя нежелательный поворот второго ис полнительного звена вокруг оси О-О-. Вращательное движение шестерни 4 через винт 16 вызывает осевое перемещение гайки 17, которая перемещает косозубую шестерню 11 относительно рейки Ю, вызывая дополнительный поворот шестерни 11, компенсирующей нежелател ный поворот второго звена вокруг оси Oj-0 . Передаточное отношение винтовой и косоаубой передач принимается равным передаточному отношению конических колес 14 и 15, что обеспечивает отсутствие поворота второго звена вокруг оси при повороте первого зве на вокруг оси . Независимый поворот второго звена относительно оси Oft-Og, осуществляется от гйдроцилиндра 8 через рейку 1О на шестерню 11, кото рая, поворачиваясь относительно гайки 17, вращает вал 12, который в свою
6
OD 884 очередь через колеса 13, 14, 15 поворачивает второе звено. Формула изобретения 1.Привод робота, содержащий силовые цилиндры, механически передачи и компенсирующий механизм, отличающийся тем, что, с целью упрощения конструкции и уменьщения веса подвижных элементов, компенсирующий механизм выполнен в виде суммирующей косозубой реечной передачи, зубчатые колеса которой кинематически связаны со звеньями робота и между собой. 2,Привод по п. 1, отличающий с я тем, что рейка установлена с возможностью перемещения. Источники информации, принятые во внимание при экспертизе: 1, Беля НИН П. Н. Промышленные ро боты, М., 1975, с. 183-184.
