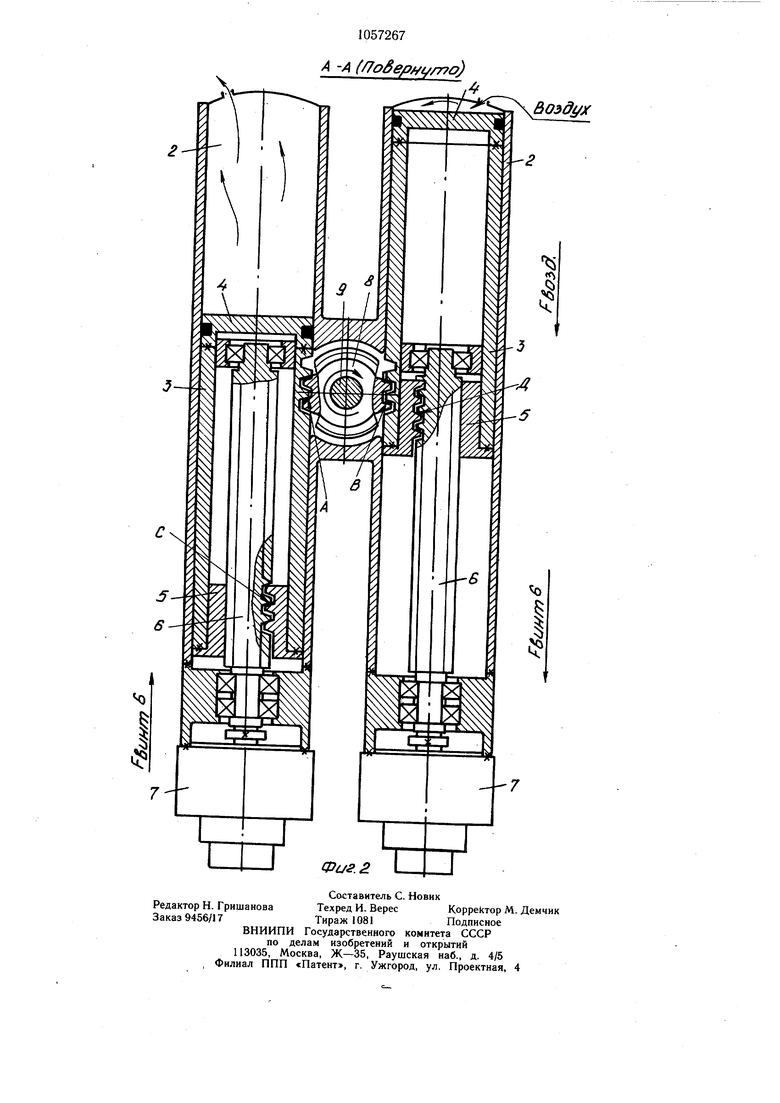
Изобретение относится к машиностроению, а именно к промышленным роботам, применяемым для выполнения различных технологических операций. Известен промышленный робот, содержапий механизмы выдвижения и подъема руки, установленные на механизме поворота, состояш,ем из двух пневмоцилиндррв, смонтированных на основании, и двух реек, жестко закрепленных на поршнях пневмоцилиндров и связанных с шестерней I. Недостатками такой конструкции являются ограниченное число точек позиционирования, неравномерность движения, невозможность регулирования с-корости. его рабочего органа и люфт в зацеплениях привода поворота, что не позволяет обеспечить любой заданный закон движения рабочего органа и уменьшает точность позиционирования. Цель изобретения - повышение точности позиционирования при любом заданном законе движения рабочего органа. Поставленная цель достигается тети, что в промышленном роботе, содержащем механизмы выдвижения и подъема руки, установленные На механизме поворота, состоящем из двух пневмоцилиндррв, смонтиррванных на основании, и двух реек, жестко закрепленных на поршнях пневмоцилиндррв и связанных с шестерней, рейки механизма поворрта выполнены полыми, а каждый пйевмоцилиндр механизма поворрта снабжен управляемой винтовой паррй, смонтиррванной внутри полой рейки, при этом гайка каждой винтоъой парь кестко соединена с порщнем соответствующего пневмоцилиндра. Применение двух самотормозящихся винтовых пар и двух управляемых электррдвигателей в пневмоцилиндрах поворрта, из KOTOpbix каждый попеременно выполняет роль упругого элемента, позволяет получить безлюфтовое замыкание в зубчато-реечных и винтовых парах пневмоцилиндррв поворрта. Это очень важно, так как погрешность позициониррвания увеличивается во столько раз, во сколько радиус шестерни зубчатореечной передачи меньше радиуса вылета рабочего органа робота. Получение безлюфтового замыкания в пневмоцилиндрах поворрта в свою очередь повышает точность позициониррвания рабочего органа робота. На фиг. 1 изображен робот, общий вид; на фиг. 2 - сечение А-А на фиг. 1. Предлагаемый промышленный робот состоит из основания 1, двух пневмоцилиндров 2 поворота, установленных на основании 1, двух реек 3, жестко закрепленных на поршнях 4, двух гаек 5, самотормозящихся винтовых пар, закрепленных к рейкам 3, двух винтов 6 этих же пар, соединенных с валами управляемых электродвигателей 7. В зацепление с рейками 3 входит щестерня 8, жестко соединенная с валом 9 (фиг. 1 и 2). К валу 9 присоединена траверса 10,на которой закреплены два штока с поршнями 11 пневмоцилиндров подъема рабочего органа. Гильзы 12 пневмоцилиндррв подъема рабоliero органа соединены с гайкой 13 самотормозящейся винтовой парь:, винт 14 которой присоединен к валу управляемого электррдвигателя 15. К гильзам 12 пневмоцилиндррв подъема рабочего органа жестко закреплен . пневмоцилиндр выдвижения рабочего органа, выполненный в виде корпуса 16, в которрм к поршню со штоком 17 закреплена гайка 18 самотормозяшейся винтовой парьг, а винт 19 этой же парь соединен с валом управляемого электродвигателя 20. Пневмоцилиндр выдвижения содержит полость 21. Пррмышленный робот работает следуюшим образом. В зависимости от заданной пррграммы, согласно которой необходимо рабочий орган, закрепленный на штоке пневмоцилиндра выдвижения рабочего органа, выдвинуть, поднять и повернуть вокруг вертикальной оси ррбота, в полость 21 пневмоцилиндра выдвижения рабочего органа подается сжатый воздух. Однако это не вызывает перемещения штока 17, так как самотормозящийся винт 19 не вращается. Через некоторьш пррмежуток времени, равный времени от момента подачи исполнительной команды до момента срабатывания золотника (не показан), включается управляемый электррдвигатель 20 и винт 19 начинает вращаться. Осевая сила, вызванная вращением винта 19, Направлена в сторрну действия сжатого воздуха. В этом случае поршень со штоком 17 получает возможность двигаться в заданном направлении со скоростью, зависящей от числа оборотов управляемого электродвигателя 20 и шага винта 19. По достижении заданного положения управляемый электррдвигатель 20 выключается и рабочий орган останавливается. После выдвижения рабочего органа сжатый воздух подается в полость 22 пневмоцилиндррв подъема рабочего органа. Но так как винт 14 самотормозящейся винтовой парь не вращается, то гильзы 12 пневмоцилиндррв, к которьш закреплена гайка 13 той же винтовой парь и пневмоцилиндр выдвижения рабочего органа не может перемещаться. Через некоторый промежуток времени, равный времени от момента подачи исполнительной команды до момента срабатывания золотника, включается управляемый электродвигатель 15 и винт 14 начинает вращаться. Осевая сила, вызванная вращением винта 14, направлена в сторону действия сжатого воздуха. При этом гильзы 12, гайка 13 и пневмоцилиндр выдвижения рабочего органа, начинает перемещаться в заданном направлении со скоростью, зависящей от числа оборотов управляемого двигателя 15 и шага винта 14. По достижении
заданного положения управляемый электродвигатель 15 выключается и гильзы 12 вместе с рабочим органом останавливаются в заданном соответствии с программой положения.
Для поворота рабочего органа вокруг вертикальной оси в необходимом по заданной программе направлении в правый цилиндр 2 подается сжатый воздух. При этом правый поршень 4 через правую рейку 3 давит своим зубом на шестерню 8, которая в свою очередь противоположным зубом тянет левую рейку 3. Левая гайка 5, закрепленная на левой рейке 3, упирается в левый винт 6, который может вращаться в опорных подшипниках левого цилиндра 2. Таким образом, все люфты в точках А, В, С контакта выбраны. Но шестерня 8 пока что вращаться не может, так как самотормозящийся левый винт 6 остается неподвижным. Через некоторый промежуток времени, равный времени от момента подачи исполнительной команды до момента срабатывания золотника, включаются электродвигатели 7. При этом винты 6 начинают вращаться, а перемешающиеся рейки 3 вращают шестерню 8 и жестко закрепленный с ней вал 9. Но так как возможная скорость перемещения реек 3 всегда больше, чем заданная скорость поступательного движения левой гайки 5, то в течение всего пути их движения беззазорное зацепление в зубчато-реечной передаче и в левой винтовой паре 5 и 6 в точках А, В, С контакта сохраняется, а скорость перемещения реек (вращение шестерни 8) зависит от числа оборотов и шага левого ходового винта 6. Таким образом, роль управляюшего элемента выполняет левый электродвигатель 7, который и задает закон движения. В процессе перемещения реек 3 из-за кинематической погрешности всех зацеплений и неравномерности вращения управляющего левого электродвигателя 7, правый винт б будет или разгоняться или тормозиться. Если например, в зацеплении правого винта 6 и правой гайки 5 в начальный момент движения или в процессе движения произойдет разрыв кинематической цепи (появится люфт в контакте Д), то вследствие уменьшения нагрузки на правый электродвигатель 7 правый винт 6 начинает/разгоняться и снова замкнет кинематическую цепь в контакте Д. При увеличении силы давления в контакте Д, являющейсяследствием возможного уменьшения числа оборотов левого электродвигателя 7 или кинематической погрещности всей цепи, скорость вращения правого электродвигателя 7 уменьщается, так как вся кинемати5 ческая цепь жесткая и замкнута по контактам А,В,С,Д, а винтовые пары самотормозящиеся. Следовательно, если левый электродвигатель 7 выполняет роль управляющего элемента, то правый электродвигатель 7
Q работает в моментном режиме, а магнитное поле его выполняет роль упругого элемента, компенсирующего все погрешности зацеплений.
При реверсе сжатый воздух подается в ле5 вый цилиндр 2. Роль управляющего элемента в этом случае будет выполнять правый электродвигатель 7, а-роль упругого элемента, компенсирующего погрешности шагов всех кинематических пар и неравномерности врашения правого электродвигателя 7, бу0 дет выполнять магнитное поле левого электродвигателя 7.
В состоянии покоя разрыв кинематической цепи по контактам А, В, С, Д под действием внешних возмущающих сил (вибра5 ции, рабочие нагрузки) не произойдет, так как винты 6 самотормозящиеся.
Полученное таким образом безлюфтовое зацепление в зубчатых рейках 3 с шестерней 8 и винтовых пар 5 и 6 повысит точность позиционирования рабочего органа робота.
Для осуществления различных видов движения, например описания рабочим органом пространственной кривой, должны работать одновременно все пневмоцилиндры 2 и управляемые электродвигатели 7, скорость вращения которых зависит от заданного закона движения.
Таким образом, промыщленный робот может быть использован на таких работах,как сварка, полировка, т.е. там, где требуется сложный закон движения рабочего 0 органа, осуществление которого основывается на сочетании пневматического привода с электрическим. Такое сочетание позволяет соединить в одной конструкции достоинства пневматических роботов (большая удельная мощность, малые весогабаритные показа5 тели) с достоинствами электрических (возможность осуществить любой закон движения, точность позиционирования, регулировка скорости в щироком диапазоне).

| название | год | авторы | номер документа |
|---|---|---|---|
| Силовой привод | 1981 |
|
SU1024606A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| Устройство для установки труб в трубные решетки теплообменников | 1983 |
|
SU1186452A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Телескопический механизм выдвижения рабочего органа манипулятора | 1980 |
|
SU1066802A1 |
| МЕХАНИЗМ ПОДАЧИ ПИЛИГРИМОВОГО СТАНА | 1972 |
|
SU358043A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
| Манипулятор | 1985 |
|
SU1291383A1 |
| ГИДРАВЛИЧЕСКИЙ ДОМКРАТ | 2015 |
|
RU2620570C1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
ПРОМЫШЛЕННЫЙ РОБОТ, содержащий механизмы выдвижения и подъема руки, установленные на механизме поворота, состоящем из двух пневмоцилиндров, смонтированных на основании, и двух реек, жестко закрепленных на поршнях, пневмоцилиндррв и связанных с шестерней, отличающийся тем, что, с целью повышения точности позиционирования, рейки механизма поворота выполнены полыми, а каждый пневмоцилиндр механизма поворота снабжен управляемой винтовой парой, смонтированной внутри полой рейки, при этом гайка каждой винтовой пары жестко соединена с поршнем соответствуюшего пневмоцилиндр а.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Промышленный робот | 1974 |
|
SU503711A1 |
