(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1978 |
|
SU874328A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Промышленный робот | 1978 |
|
SU776912A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Манипулятор | 1978 |
|
SU770782A1 |
| Манипулятор | 1984 |
|
SU1288044A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Манипулятор | 1979 |
|
SU850372A1 |
| Манипулятор | 1986 |
|
SU1404328A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
1
Изобретение относится к машиностроению, в частности к манипуляторам, предназначенным для автоматизации производственных процессов, и может быть использовано в различных отраслях народного хозяйства.
Известен манипулятор, содержащий основание с механизмом поворота, механизм подъема и механические руки с захватными органами 1.
Недостатком известного манипулятора является то, что примененная в нем схема предохранения штока механической руки от поворота не позволяет использовать эту руку в устройствах с необходимостью поворота ее вокруг своей оси. В этом случае ось штока, установленного эксцентрично относительно цилиндра руки, не была бы неподвижна и описывала бы окружность вокруг оси цилиндра радиусом, равным эксцентриситету, а это в большинстве случаев неприемлемо.
Известен также промышленный робот, содержащий механические руки и приводы их подъема и поворота, выполненные в виде силовых цилиндров, кинематически связанных между собой зубчато-реечной передачей, рейка которой расположена на штоке силового цилиндра поворота 2.
Однако это устройство не исключает возможность поворота штока цилиндра подъема относительно оси цилиндра, что снижает надежность и точность позиционирования объекта в пространстве.
Цель изобретения - повышение надежности и точности позиционирования.
Указанная цель достигается тем, что зубчатое колесо зубчато-реечной передачи жестко и с эксцентриситетом смонтировано на корпусе силового цилиндра привода подъема, и шток этого силового цилиндра расположен эксцентрично относительно оси цилиндра.
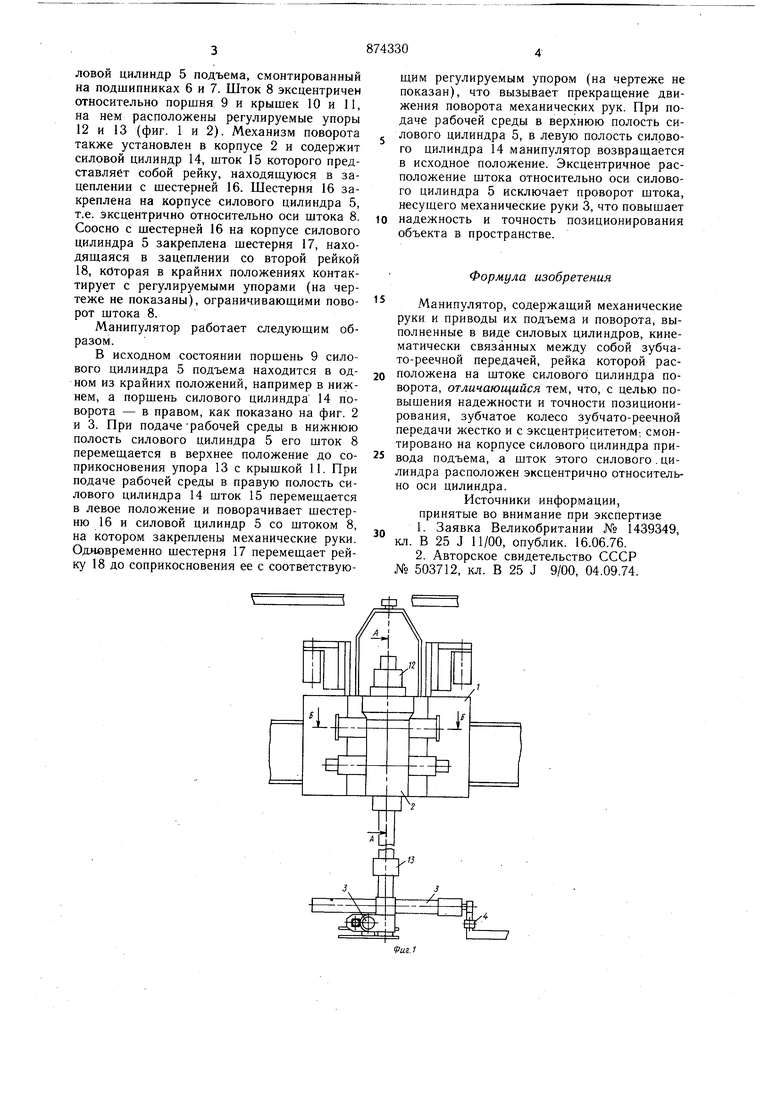
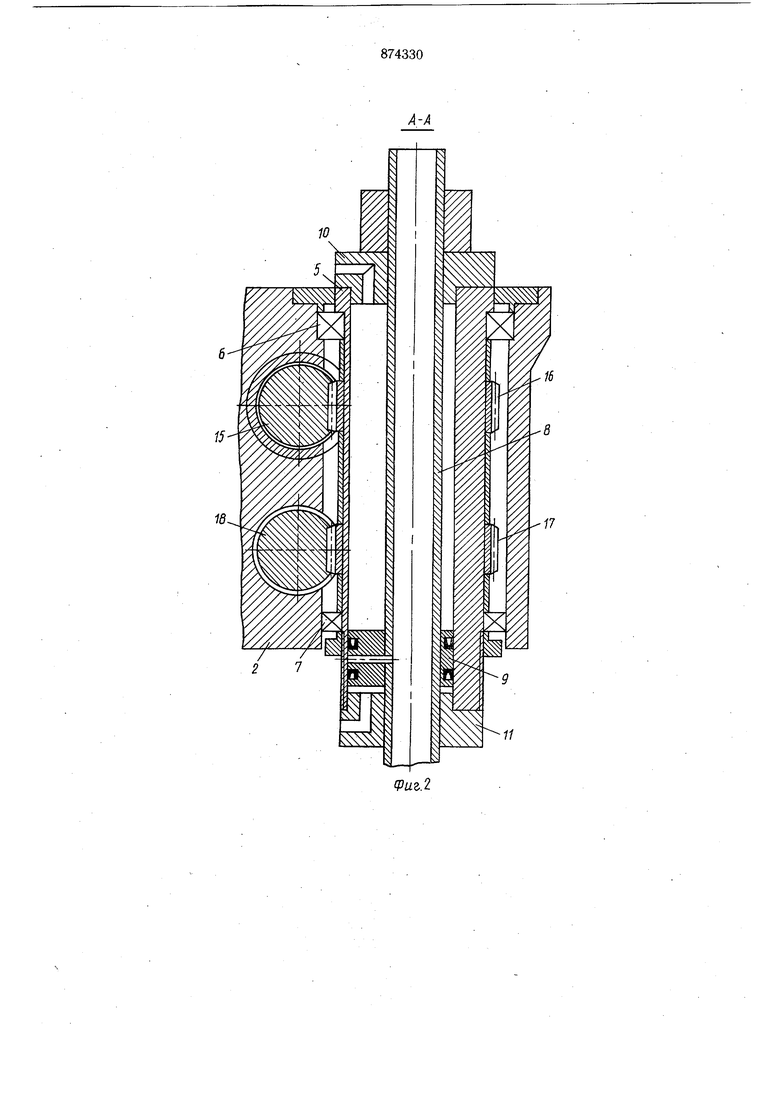
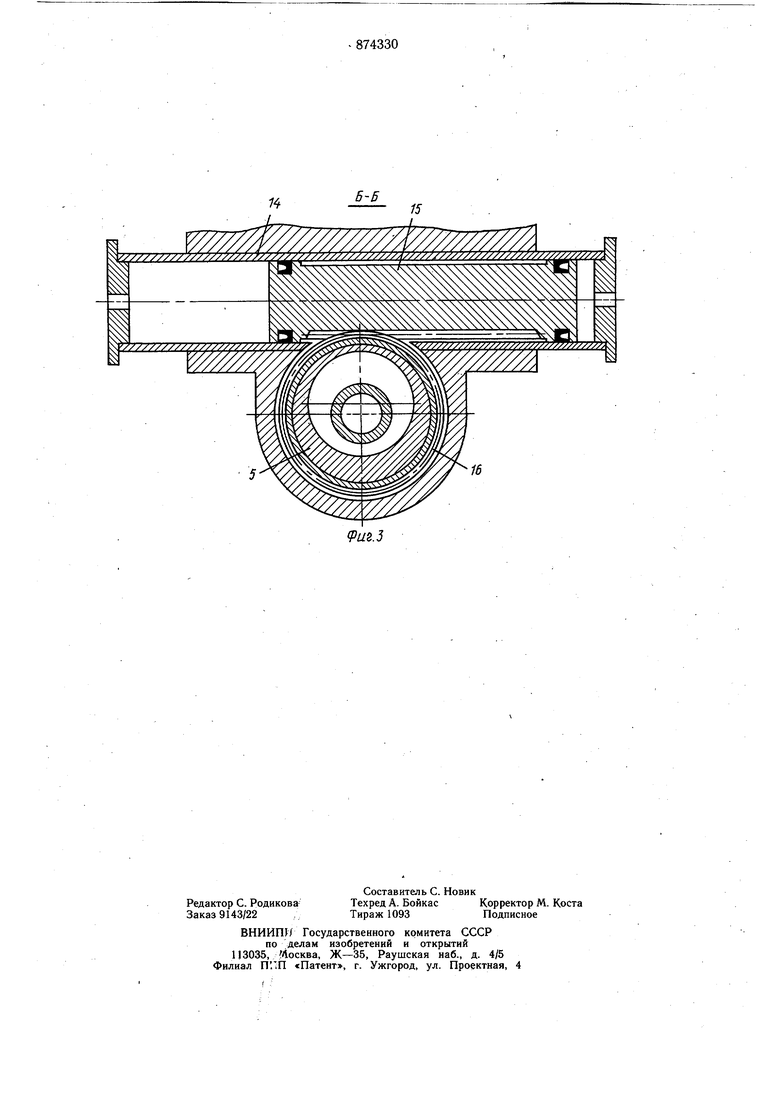
На фиг. 1 схематически изображен предлагаемый манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Манипулятор состоит из основания 1,
2Q корпуса 2 с механизмами подъема и поворота механических рук 3 с захватным органом 4 на каждой из них. В корпусе 2 установлен механизм подъема, содержащий силовой цилиндр 5 подъема, смонтированный на подшипниках 6 и 7. Шток 8 эксцентричен относительно поршня 9 и крышек 10 и И, на нем расположены регулируемые упоры 12 и 13 (фиг. 1 и 2). Механизм поворота также установлен в корпусе 2 и содержит силовой цилиндр 14, шток 15 которого представляет собой рейку, находящуюся в зацеплении с шестерней 16. Шестерня 16 закреплена на корпусе силового цилиндра 5, т.е. эксцентрично относительно оси штока 8. Соосно с шестерней 16 на корпусе силового цилиндра 5 закреплена шестерня 17, находящаяся в зацеплении со второй рейкой 18, которая в крайних положениях контактирует с регулируемыми упорами (на чертеже не показаны), ограничивающими поворот штока 8.
Манипулятор работает следующим образом.
В исходном состоянии поршень 9 силового цилиндра 5 подъема находится в одном из крайних положений, например в нижнем, а поршень силового цилиндра 14 поворота - в правом, как показано на фиг. 2 и 3. При подаче-рабочей среды в нижнюю полость силового цилиндра 5 его шток 8 перемещается в верхнее положение до соприкосновения упора 13 с крышкой 11. При подаче рабочей среды в правую полость силового цилиндра 14 шток 15 перемещается в левое положение и поворачивает шестерню 16 и силовой цилиндр 5 со штоком 8, на котором закреплены механические руки. Одновременно шестерня 17 перемещает рейку 18 до соприкосновения ее с соответствующим регулируемым упором (на чертеже не показан), что вызывает прекращение движения поворота механических рук. При подаче рабочей среды в верхнюю полость силового цилиндра 5, в левую полость силового цилиндра 14 манипулятор возвращается в исходное положение. Эксцентричное расположение штока относительно оси силового цилиндра 5 исключает проворот штока, несущего механические руки 3, что повышает надежность и точность позиционирования объекта в пространстве.
Формула изобретения
Манипулятор, содержащий механические руки и приводы их подъема и поворота, выполненные в виде силовых цилиндров, кинематически связанных между собой зубчато-реечной передачей, рейка которой расположена на штоке силового цилиндра поворота, отличающийся тем, что, с целью повышения надежности и точности позиционирования, зубчатое колесо зубчато-реечной передачи жестко и с эксцентриситетом; смонтировано на корпусе силового цилиндра привода подъема, а шток этого силового.цилиндра расположен эксцентрично относительно оси цилиндра.
Источники информации,
принятые во внимание при экспертизе
