(54) ЭЛЕКТРОПРИВОД ЦЕПНОГО КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2093378C1 |
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1983 |
|
SU1121896A2 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2619925C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| Двухдвигательный электропривод | 1991 |
|
SU1833961A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| Уравнительный привод для цепных тяговых органов транспортирующих машин | 1980 |
|
SU932742A1 |
Изобретение относится к приводам цепных конвейеров, работающих в ус;1овиях равномерной загрузки, в частности в Горнорудной, песозаготовительной в лесоо абатьшающей промышленности.
Иавестш,. приводы цепных конвейеров с уравнительными механизмами, с плане- тарной передачей, а также с некруглыми зубчатыми колесами я редукторами с переменным передаточным числом на их оснснве.
Конструкция таких приводов сложна, они нет снологичны в изготовлении, Hi кроме того, приводы с некруглыми зубчатыми колесами создают стасность закпинивания, увеличивающуюся в процессе взноса колес, а приводы с планетарной передачей не применимы для реверсивных конвейеров.
Известен также электропривод цепного конвейера, включающий приводной асинхронный электродвигатель и звездочку.
Однако наиболее существенным недостатком привода является его малая надежность. Кроме того, уравнительный механизм привода имеет большое число трушихся частей. Попытка же снизить аднамические нагрузки в тяговой цепи приводит к усложнению механической передачи и неизбежному появлению динамических усилий в нем. Этот недостаток характерен для всех извес.тных приводов цепных конвейеров.
С целью обеспечения равномерной скорости движения, цепи и снижения динамических нагрузок, в цепь статорных обмоток асинхронного электродвигателя введены резисторы, тиристорный ключ, пороговое устройство и датчик положения расположенный на валу звездочки, причем пороговое устройство соединено с выходо датчика положения.
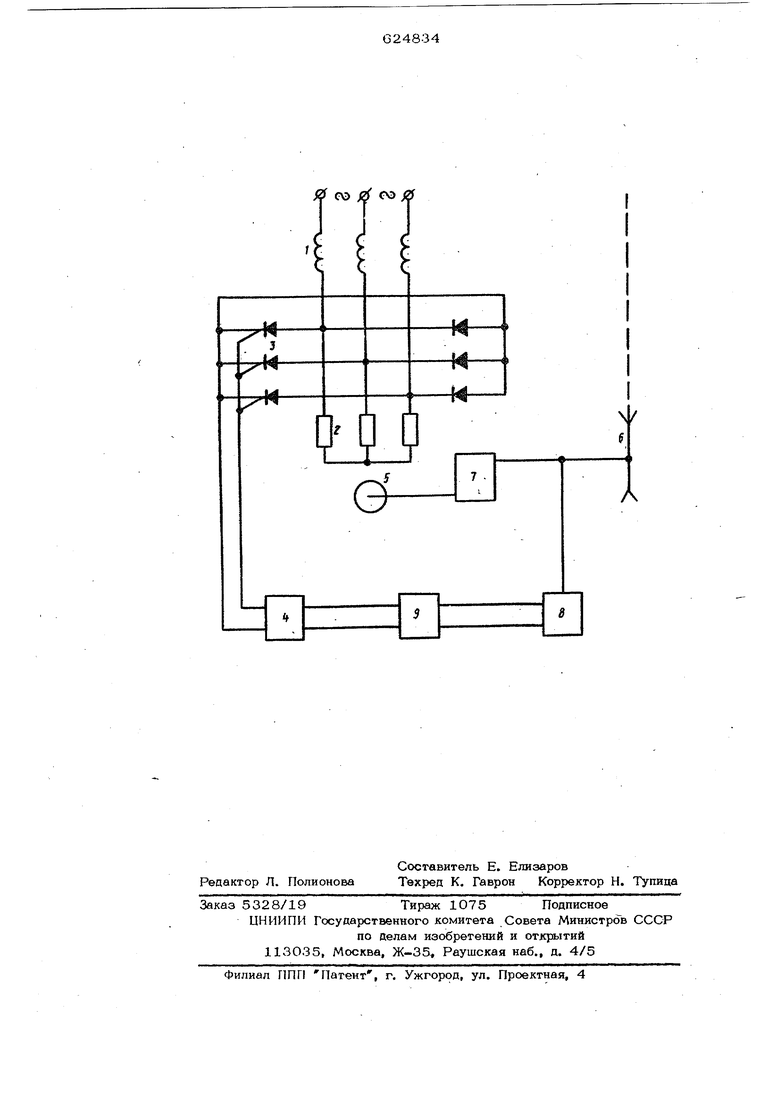
На чертеже дана принципиальная схема, электропривода цепного конвейера.
В цепь статорных обмоток 1 приводного асинхронного электродвигателя включены добавочные резисторы 2, коммутируемые трехфазным тиристорным ключом 3, цепи управления которого питаются от усилителя 4 мощности. Ротор 5 двигателя соеданен со звездочкой 6 конвейера через редуктор 7. На валу звездочкя 6 расположен датчик 8 положения, формирующий электрический сигнал в функции угла зацепленяя звена цепи с зубцом звездочки, являющийся сигналом управления порогового усгройсгва, например триггера Шмидта 9. Устройство работает следующим образом. В первом полупе{жоде зацепления клю 3 заперт, в результате чего в цепь обмоток 1 введены добавочные сопротивлеиня 2, выбираемые таким офазом, чт момент сопротивления нагрузки превыша ет вращакщий момент двигателя и его скорость вращения будет уменьщаться, компенсируя увеличение линейной скорос ти движения цепи. Во втором полупериоде; зацепления датчик 8 положения подает сигнал на включение ключа 3, шунтирующегос оп|ротивления 2. Момент сопротивления нагрузки становится меньше вращающего момента двигателя, увеличивающаяся скорость, вращения которого компенсирует уменьщение линейной ск роати движения цепи. При входе .в зацепление следующего звена цепи алгоритм работы привода повторяетсяi, Величина добавочных резисторов 2 определяе эффективность выравнивания скорости движения цепи и выбирается в зависимос ти от момента сопротивления .йагрузки и маховых масс системы. В предлагаемом электроприводе устранено механическое уравнительное устройство, а вместе с ним и присушив ему недостатки. Равномерность движения тяговой цепи обеспечена с помощью схемы управления приводным асинхронным электродвигателем. Снижение динамических нагрузок : таким способом позволяет увеличить ресурс работы тяговой цепи и повысить надежность всего привода. Кроме того, снижение динамических нагрузок позволяет повысить производительность конвейера за счет сокращения времени ремонтных простоев, обусловленных обрывами тяговых цепей, и возможности увеличения скорости движения тягового органа. Формула изобретения Электропрмивод цепного конвейера, включающий приводной асинхронный электродвигатель и звездочку, отличающийся тем, что, с целью обеспечения равномерной скорости движения цепи и снижения динамических нагрузок, в цепь статорных обмоток асинхронного электродвигателя введены резисторы, тиристорный ключ, пороговое устройство и датчик положения, расположенный на валу звездочки, причем пороговое устройство соединено с выходом датчика положения.
CV J0 ОО
И
l/
f
л
