Изобретение относится к подъемнотранспортному оборудованию, в частности к грузозахватным приспособлениям.
По авт. св. NO 3176О5 известны захваты-(анипуляторы к подъемным кранам для перемещения в лапах листовых материалов, например стали, содержащие четьфехугольную раму, несущую на поп ечных траверсах две пары перемешакицихся в двух взаимно перпендикулярных направлени51Х захватных лап с горизонтальными подхватами и разделительным механизмом передвижения, смыкания и размыкания.
Однако такой захват-манипулятор может работать с грузами, габарить которых не превышают размеров траверс.
Цель изобретения - расширение типоразмеров захватываемого груза.
Это достигается тем, что продольные и поперечные траверсы выполнены телескопическими и снабжены приводами их перемещения.
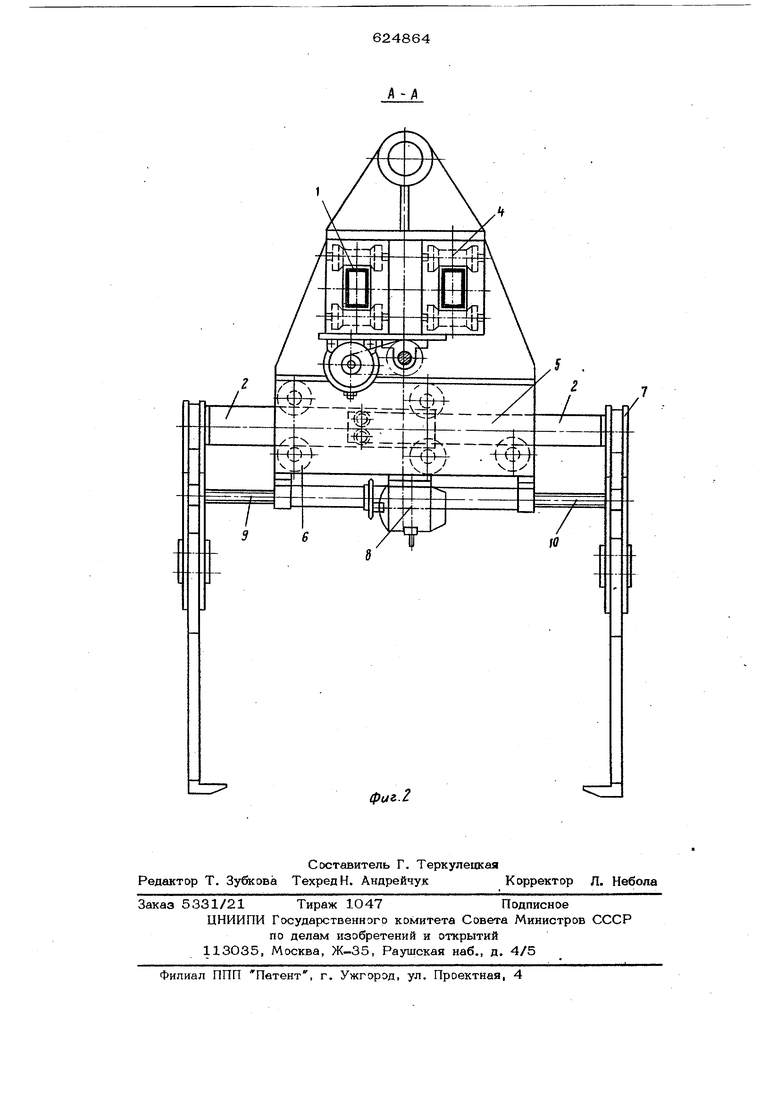
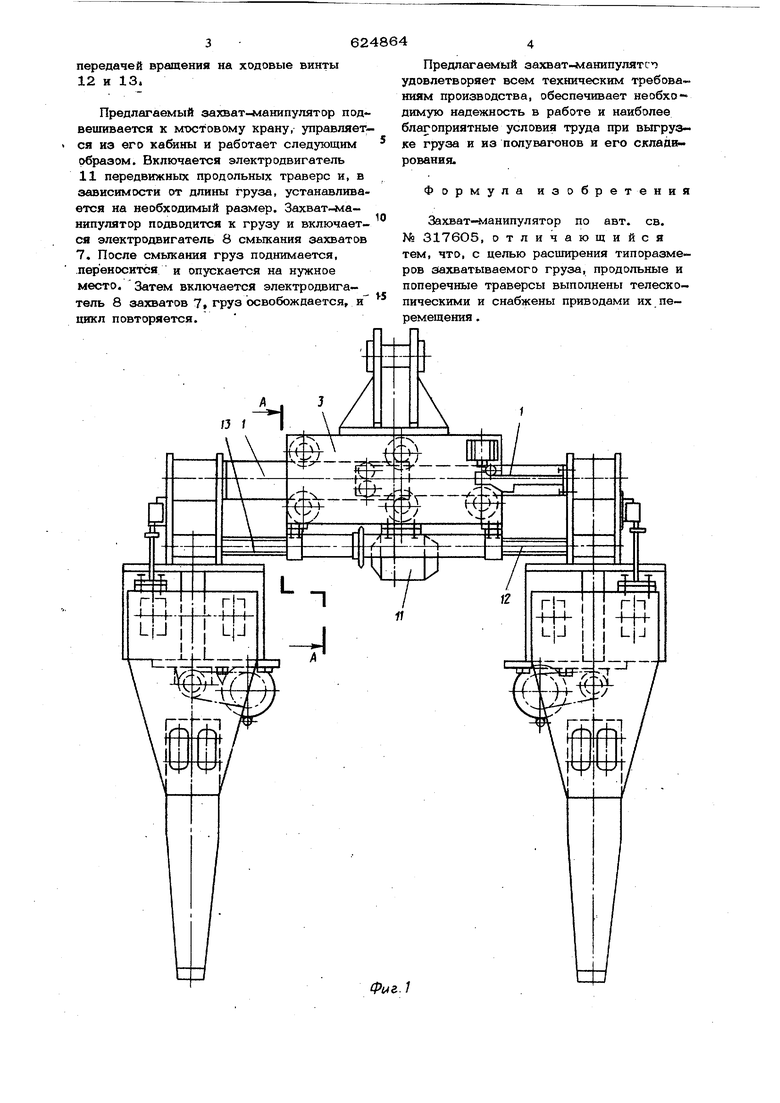
На фиг. 1 изображен предлагаемый захват- манипулятор, общий вид; на фиг. 2 - то же, разрез А-А на фиг. 1.
Захват-манипулятор представляет со:бой четырехугольную раму, состоящую из двух продольных траверс 1 и четырех поперечных ipaeefic 2, жестко закрепленных на концах продольных траверс. Поперечные траверсы 2 расположены перпещшкулярно к продольным траверсам 1. Продольные траверсы 1 изготовлены телескопическими и в зависимости, от габа ритов груза вдвигаются в корпус 3 или выдвигаются из него по роликам 4. Поперечные траверсы 2 также изготовлены телескопическими и1 вдвигаются в корпус 5 или выдвигаются из него по роликам 6 На концах поперечных траверс 2 жестко закреплены захваты 7, смьшающиеся или размьпсающиеся в зависимости от размеров груза. Для смьпсания или размыкания захватов 7 служит электродвигатель 8 с, передачей вращения на ходовые винты 9 и 1О. Для передвижения продольных траверс 1 служит электродвигатель 11 с передачей врашения на ходовые винты 12 и 13. Предлагаемый захват-манипулятор подвешивается к MDctoBOMy крану, управляется из его кабины и работает следующим образом. Включается электродвигатель 11 передвижных продольных траверс и, в зависимости от длины груза, устанавливается на необходимый размер. Захват-манипулятор подводится к грузу и включается электродвигатель 8 смьпсания захватов 7. После смыкания груз поднимается, .переносится и опускается на нужное место. Затем включается электродвигатель 8 захватов 7 груз освобождается, я цикл повторяется.
Фиг.1 Предлагаемый захват-манипулятп удовлетворяет всем техническим требованиям производства, обеспечивает необходимую надежность в работе и наиболее благоприятные условия труда при выгрузке груза и из полувагонов и его склаанрования. Формула изобретения Захват-манипулятор по авт. св. NO 3176О5, отличающийся тем, что, с целью расширения типоразмеров захватываемого груза, продольные и поперечные траверсы выполнены телескопическими и снабжены приводами их перемещения . н 
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ-МАНИПУЛЯТОР | 1971 |
|
SU317605A1 |
| Захват-манипулятор подъемного крана для перемещения пакетированного груза | 1977 |
|
SU683979A1 |
| СТЕНД ДЛЯ МОНТАЖА И ДЕМОНТАЖА ШИНЫ КОЛЕСА И ТЕЛЕЖКА ДЛЯ ПЕРЕДВИЖЕНИЯ КОЛЕСА | 2007 |
|
RU2340464C2 |
| Захват-кантователь | 1980 |
|
SU889591A2 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН, ПРЕИМУЩЕСТВЕННО ДЛЯ ВОССТАНОВИТЕЛЬНЫХ РАБОТ | 1998 |
|
RU2155155C1 |
| МОБИЛЬНАЯ ПЕРЕГРУЗОЧНАЯ УСТАНОВКА | 1993 |
|
RU2097305C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2288885C2 |
| Устройство для формирования пакетов из круглых лесоматериалов | 1982 |
|
SU1022918A2 |
| Челюстной захват к подъемному крану для транспортирования пачек листового материала | 1956 |
|
SU107759A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |