(54) ЗАХВАТ-МАНИПУЛЯТОР ПОДЪЕМНОГО КРАНА
ДЛЯ ПЕРЕМЕЩЕНИЯ ПАКЕТИРОВАННОГО ГРУЗА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-манипулятор | 1976 |
|
SU624864A2 |
| ЗАХВАТ-МАНИПУЛЯТОР | 1971 |
|
SU317605A1 |
| Грузозахватное устройство | 1976 |
|
SU763233A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Вилочный захват для грузов | 1986 |
|
SU1402535A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Грузозахватное устройство | 1985 |
|
SU1321660A1 |
| Захватное устройство для плит в кассетах | 1979 |
|
SU893804A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| ТРАВЕРСА ДЛЯ БИГ-БЕГОВ С АВТОМАТИЧЕСКОЙ РАССТРОПОВКОЙ | 2024 |
|
RU2834112C1 |
Изобретение относится к подъемнотранспортному машиностроению и касается конструирования.захват-манипуляторов подъемного крана для перемещения пакетированного груза.
Известен захват-манипулятор подъ емно1 о крана для перемещения пакетированного груза, преимущественно сортового проката, содержащий раму, на которой установлены с возможность перемещения вдоль нее поперечные траверсы, несущие захватные , также установленные с возможностью перемещения вдоль них, привод перемещения траверс и захватньк лап и винтовой механизм поворота захватных лап 1.
Недостаток указанного захвата-манипулятора является длительность захвата груза, из-за длительности поворота захватных лап.
Цель изобретения - ускорение захвата груза путем уменьшения времени поворота захватных лап.
Для этого механизм поворота снабжен рычажным трехзвенником, одно звено которого жестко связано с гайкой винтового механизма и имеет продольные пазы, а два других звена
жестко соединены одними концами с соответствующими лапами, а на их других концах закреплены пальцы, расположенные в упомянутых продольных пазах.
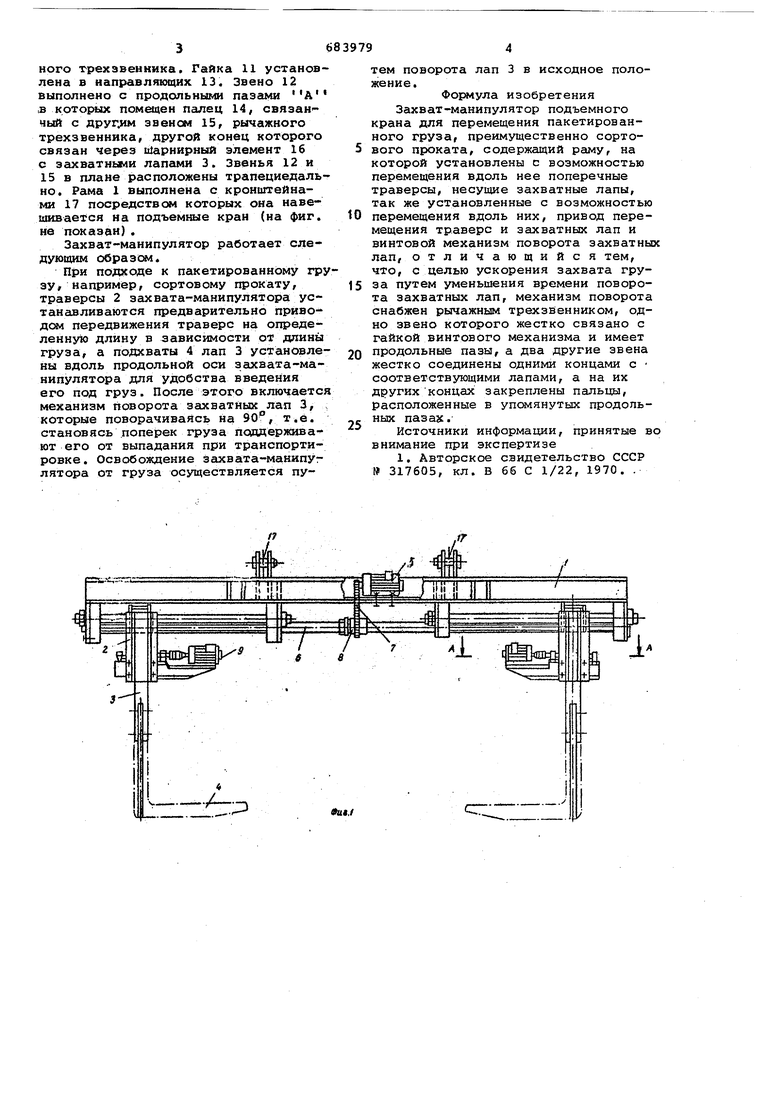
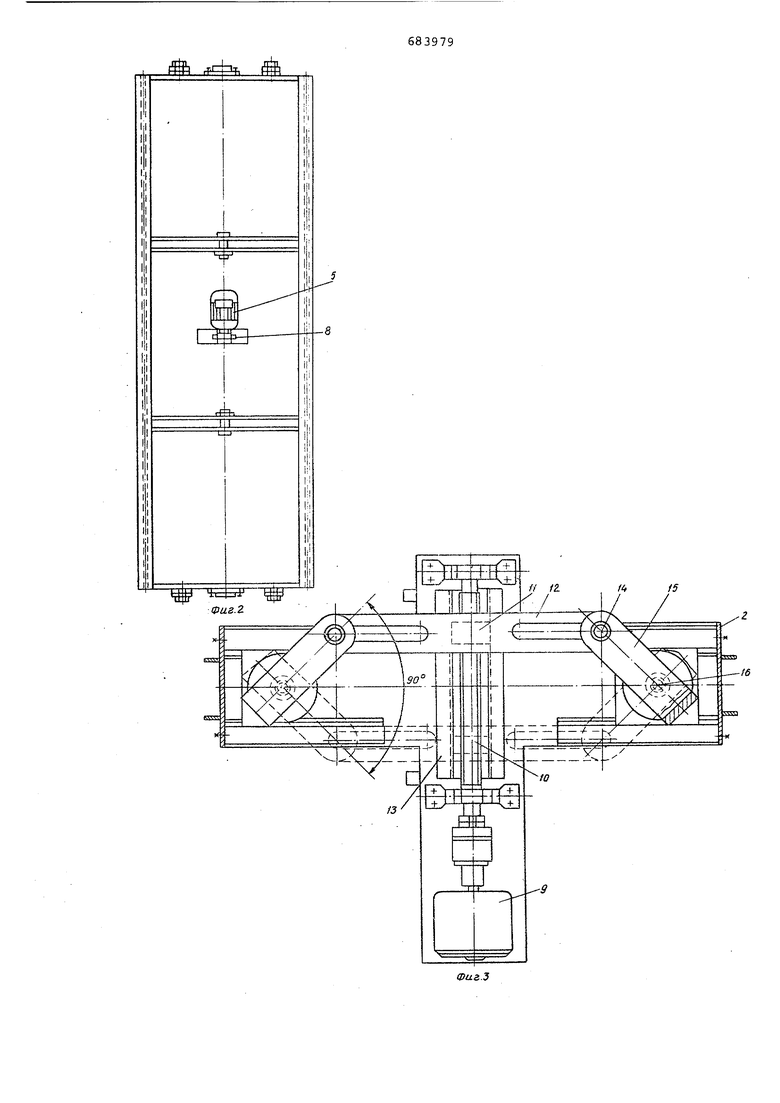
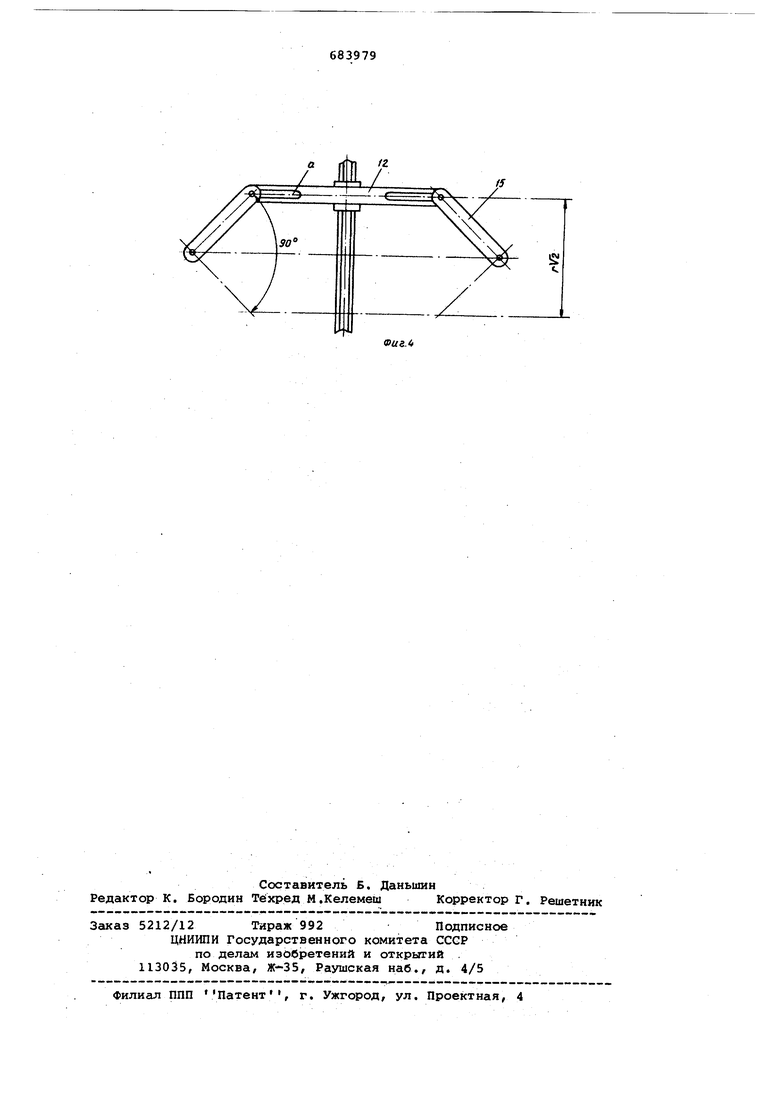
На фиг. 1 - схематически изображен описываемый манипулятор, вид спереди; на фиг. 2 - то же, вид свер У фиг. 3 - сечение по А-А на фиг. 1; на фиг. 4 - кинематическая схема устройства поворота.
Описываемый за.хват-манипулятор содержит раму 1, несущую на поперечных траверсах 2 две пары захватных лап 3, перемечающихся в двух взаим-. но перпендикулярных направлениях, с подхватами 4.
Захват-манипулятор снабжен приводом передвижения траверс 2 и винтовым механизмом поворота захватных лап 3. Привод передвижения траверс 2 содержит электродвигатель 5, соединенный с ходовьми винтами 6 через цепную передачу 7 и муфту предельного момента 8. Механизм поворота каждой пары лап содержит электродвигатель 9, связанный через ходовой винт 10 с гайкой 11, жестко прикрепленной к одному звену 12 рычажного трехзвеиника. Гайка И установлена в направляющих 13. Звено 12
А
выполнено с продольными пазами
,в которых помещен палец 14, связанчый с звеном 15, рычажного трехзвенника, другой конец которого связан через и арнирный элемент 16 с захватньми лапами 3. Звенья 12 и 15 в плане расположены трапециедально. Рама 1 выполнена с кронштейнами 17 посредством которых она навешивае1 ся на подъемные кран (на фиг. не показан).
Захват-манипулятор работает следующим образсял.
При подходе к пакетированному грзу/например, сортовому прокату, траверсы 2 захвата-манипулятора устанавливаются предварительно приводе передвижения траверс на определенную длину в зависимости от длины груза, а подхваты 4 лап 3 установлены вдоль продольной оси захвата-манипулятора для удобства введения его под груз. После этого включаетс механизм поворота захватных лап 3, которые поворачиваясь на 90°, т.е. становясь поперек груза поддерживают его от выпадания при траиспортировке. Освобождение зеисвата-манипуг лятора от груза осуществляется путем поворота лап 3 в исходное положение.
Формула изобретения
Захват-манипулятор подъемного крана для перемещения пакетированного груза, преимущественно сортового проката, содержащий раму, на которой установлены с возможностью перемещения вдоль нее поперечные траверсы, несущие захватные лапы, так же установленные с возможностью перемещения вдоль них, привод перемещения траверс и захватных лап и винтовой механизм поворота захватных лап, отличающийся тем, что, с целью ускорения захвата груза путем уменьшения времени поворота захватных лап, механизм поворота снабжен рычажным трехзвенником, одно звено которого жестко связано с гайкой винтового механизма и имеет продольные пазы, а два другие звена жестко соединены одними концами с соответствующими лапами, а на их другихконцах закреплены пальцы, расположенные в упснлянутых продольных пазах.
Источники информации, принятые во внимание при экспертизе
