(54) СПОСОБ ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ ИНЕРЦИОННЬК ОБЪЕКТОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ экстремального регулирования инерционных объектов с транспортным запаздыванием | 1975 |
|
SU1125601A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Устройство для управления амплитудой виброперемещений | 1980 |
|
SU922677A1 |
| Экстремальный регулятор | 1976 |
|
SU634233A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2595265C1 |
| Устройство экстремального регулирования | 1982 |
|
SU1049865A1 |
| УСТРОЙСТВО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2766907C1 |
| Способ уравновешивания цифровых автоматических экстремальных мостов переменного тока | 1981 |
|
SU970238A1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2015 |
|
RU2600688C1 |
| Система экстремального регулирования | 1982 |
|
SU1068890A1 |
Изобретение касается самонастраиваюшихся экстремальных систем автомати ческого управления.
Известны способы экстремального регулирования с непрерывным, сканированием, с помощью которых осуществляется ускорение в области экстремума. В частности, известен способ формирования постоянной скорости поиска в системе с линейным сканированием на участке приближения системы к экстремуму l.
Этот способ не позволяет получить достаточно высокое быстроаействие в смысле увеличения Частоты автоколебаний системы, ввиду ограниченных возможностей систем с непрерывным сканированием.
Наиболее близким по технической сущности к изобретению является шаговый способ экстремального регулирования, основанный на формировании пробных поисковых сигналов с переменной величиной шага поиска 2J. Шаг уменьшают в области экстремума, формируя его пропорционально первой производной или самой величине отклонения выходной координаты объекта.
Недостатком этого способа является
низкая точность регулирования в условиях недопустимости значительных отклонений поиска, которые возникают в данном случае за счет увеличения шага вне области экстремума, и значитель,
ных выбросов поискового сигнала в случае ложного реверса поиска при воздействии помех.
Целью изобретения является увеличение точности регулирования инерционньрс объектов.
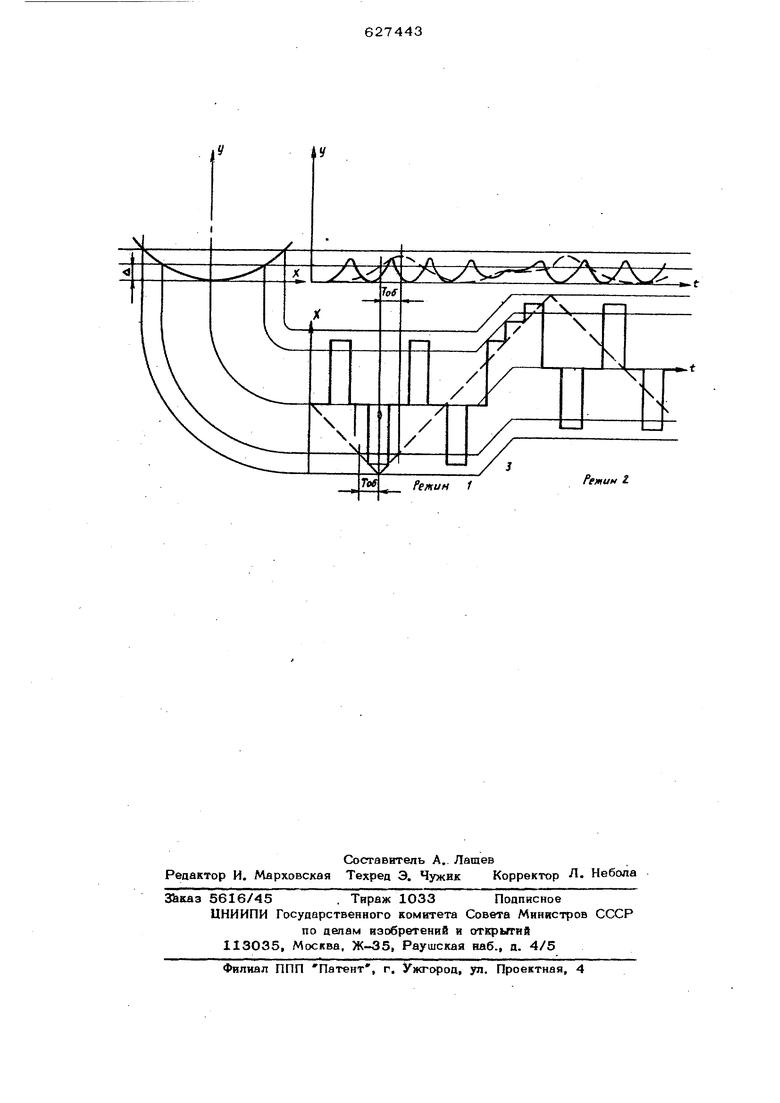
Цель достигается тем, что в системе с запоминанием экстремума формируют форсированный поисковый сигнал при превышении регулируемым сигналом заданного порогового сигнала и реверса направления поиска. При удалении от экст ремума величину шага уменьшают, вводя систему в скользящий режим, сходиый С режимом работы обычной экстремальной системы с неизменной величиной шага. . За счет увеличения шага в области экстремума значительно снижается периоа поиска в автоколебательном режиме. Это позволяет существенно снизить эффективность низкочастотных помех, что в случае регулирования инерционных объектов, имеющих обычно спектр помех низкочастотного типа, приводит к соответствующему снижению вероятности сбоев системы. Величину шага в области экстремума устанавливают такой, чтобы обеспечить срабатывание сигнум-реле регулятора при удалении системы от экстремальной точки на один шаг. Полная зона поиска таким образом оказывается равной удвоенной величине шага. В случае, если в результате црейфа экстремальной характеристики при отходе от экстре мума на один шаг (при прохождении дву шагов в одном направлении) не произошло срабатывание сигнум-реле, то движение системы продолжается в-тбм же направлении, но с другой (меньшей) величиной шага, соответствующей в среднем той скорости поиска, которая применяется при линейном сканировании и обеспечивает динамические отклонения поисковых воздействий в допустимых пределах. После срабатывания сигнум-реле движение в обратном направлении начинается с большого шага. Изобретение поясняется чертежом, Диаграмма работы системы показана сплошными линиями, пунктиром - диаграмма работы при линейном сканировании. Из диаграммы видно, что при работе по предложенному способу в периодичео ких режимах (1,2) поисковый сигнал представляет собой последовательность знакочередующихся импульсов. При вых де из периодического режима (3) осуществляется шаговое движение системы мало отличающееся от движения при линейном сканировании Реверс исполнительного механизма вновь приводит к периодическому режиму. При сопоставлении предложенного способа с другими известными способами увеличения быстродействия релейных экстремальных систем (например, со способом форсирования линейной скорости поиска) при прочих равных условиях (равенство зон нечувствительности и средних скоростей переходных процессов в области экстремума) в автоколебательном режиме период поиска в системе с форсированным шагрм оказывается существенно меньшим. Учитывая также, что зона нечувствительности в системе с запоминанием экст-i ремума значительно больше зоны нечувствительности, принимаемой обычно для случая шагового поиска с неиэменной величиной шага при той же длительности шага, помехоустойчивость системы с форсированным шагом оказь вается на несколько порядков выше помехоустойчивости обычной шаговой системы, обладающей, как известно, более вьюокой помехоустойчивостью, чем обычнаясистема с линейным сканированием. Формула изобретения Способ экстремального регулирования инерпионных объектов, основанный на формировании пробных поисковых сигналов с переменной величиной шага поиска, отличающийся тем, что, с целью увеличения точности регулирования, формируют форсированный поис ковый сигнал при превышении регулируемым сигналом заданного порогового сигнала и реверса направления поиска. Источники информации, принятые во внимание при экспертизе: 1 Draper С. S. Li J.3. Princ ipEessof Opt«m Hncr ContnoE SYstem%Qnd App cation tothe Jntepna Combustoo ,ASME New JOPK, S«.pt-f95 a.White в 3nstPuments and Automoi tlon.NM, 956.
/
/
/
/
Pexiun i
femuH 1
