Изобретение относится к средствам автоматизации технологических объектов к может быть испол1 зовано в тех случаях, когда динамические свойства объекта регулирования требуют изменения быстродействия исполнительного органа при изменении режима работы.
Известны системы для автоматического регулирования инерционных объектов, содержащие измеритель рассогласования, подключенный через демпфер к основному релейному усилителю, соединенному с исполнительным органом, и корректирующий релейный усилитель, связанный с измерителем рассогласования (I}. Выход измерителя рассогласования подсоединен к исполнительному органу.
В зависимости от полярности сигналов, поступающих от измерителя рассогласования и с выхода основного усилителя на вход корректирующего усилителя, последний вырабатывает дополнительное воздействие на исполнительный орган, что в конечном счете изменяет его быстродействие. Эффективность такого изменения быстродействия ограничена узкИм диапазоном возможных режимов работы объекта. Непосредственное
воздействие корректирующего усилителя на исполнительный орган препятствует гибкой настройке и не позволяет поэтому получить высокое качество переходных процессов. Наиболее близким по технической сущности к данному изобретению является устройство для автоматического регулирования инерционного объекта, содержащее измеритель рассогласования, выход которого соединен с корректирующим релейным усилителем и последовательно соединенными демпфером, основным релейным усилителем и изодромным блоком, вход - с выходами задатчика и датчика, ко входу которого подключены последовательно соединенные исПШгиит-ельный орган и инерционный объект, а к управляющему входу демпфера подсоединен узел настройки демпфера (2).
При изменении сверх заданного уровня сигнала на выходе измерителя рассогласования корректирующее реле своими контактами перестраивает коэффициент усиления цепи между тахогенератором, сочлененным с валом исполнительного органа, и отключающим реле, контакты котсгрого включены в линию подвода сигнала рассогласования к основному усилителю. Тем самым измеряетсй уровень настройки цепи ограничения быстродействия в зависимости от величины рассогласования между заданным и требуемым значениями регулируемого параметра.
Недостатком этого устройства является отсутствие автоматического воздействия на узел настройки демпфера (его постоянной времени), что снижает качество переходных процессов. Вместе с тем наличие в корректирующей цепи тахогенератора снижает надежность устройства.
Целью изобретения является улучшение качества переходных процессов и повышение надежности.
Для достяжения поставленной цели предлагаемая система снабжена импульсным элементом, узлом настройки импульсного элемента и дополнительным изодромным блоком, вход которого подключен к выходу корректирующего релейного усилителя, а выход соединен с узлом настройки демпфера и узлом настройки импульсного элемента, выхрд которого подключен к управляющему входу импульсного элемента, вход которого подключен к выходу основного изодромнога блока, а выход - к исполнительному органу.
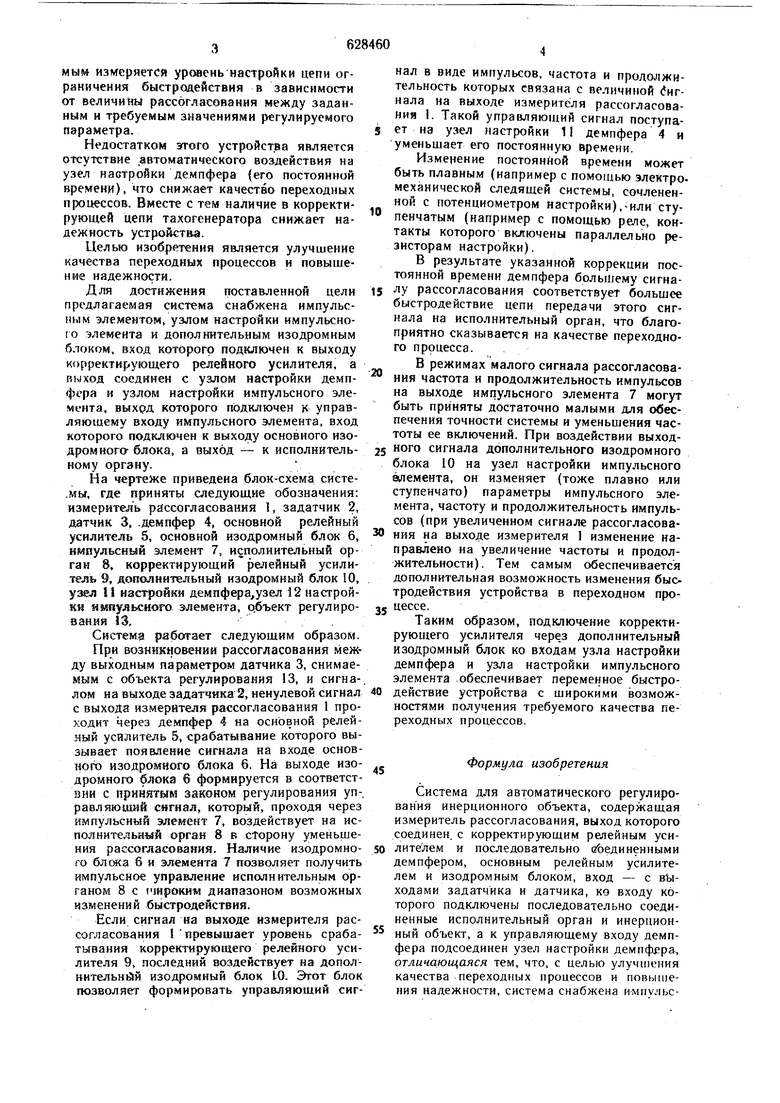
На чертеже приведена блок-схема систе.мы, где приняты следующие обозначения: измеритель рассогласования 1, задатчик 2, датчик 3, .демпфер 4, основной релейный усилитель 5, основной изодромный блок 6, импульсный элемент 7, исполнительный орган 8, корректирующий релейный усилитель 9, дополнительный изодромный блок 10, узел И настройки демпфера,узел 12 настройкя я8шулы:ного элемента, объект регулирования 13,
Система работает следующим образом. При возникновении рассогласования между выходным параметром датчика 3, снимаемым с объекта регулирования 13, и сигма-, лом на выходе эадатчика 2, ненулевой сигнал с выхода измерителя рассогласования 1 проходит через демпфер 4 на основной релейный усилитель 5, срабатывание которого вызывает появление сигнала на входе основного изодромяого блока 6. На выходе изодромного блока б формируется в соответствии с принятым законом регулирования уп-. равляюший сигнал, который, проходя через импульсный элемент 7, воздействует на исполнительный орган 8 в сторону уменьшения рассогласования. Наличие изодромного блсжа б и элемента 7 позволяет получить импульсное управление исполнительным органом 8 с (чироким диапазоном возможных изменений быстродействия.
Если сигнал на выходе измерителя рассогласования превышает уровень срабатывания корректирующего релейного усилителя 9, последний воздействует на дополнительнйй изодромный блок Ю. Этот блок позволяет формировать управляющий снгнал в виде импульсов, частота и продолжительность которых связана с величиной (Сигнала на выходе измерителя рассогласования 1. Такой управляющий сигнал поступает на узел настройки 11 демпфера 4 и уменьщает его постоянную времени.
Изменение постоянной времени может быть плавным (например с помощью электромеханической следящей системы, сочлененной с потенциометром настройки),-или ступенчатым (например с помощью репе, контакты которого включены параллельно резисторам настройки).
В результате указанной коррекции постоянной времени демпфера большему сигналу рассогласования соответствует больщее быстродействие цепи передачи этого сигт нала на исполнительный орган, что благоприятно сказывается на качестве переходного процесса.
В режимах малого сигнала рассогласования частота и продолжительность импульсов на выходе импульсного элемента 7 могут быть приняты достаточно малыми для обеспечения точности системы и уменьшения частоты ее включений. При воздействии выходного сигнала дополнительного изодромного блока 10 на узел настройки импульсного элемента, он изменяет (тоже плавно или ступенчато) параметры импульсного элемента, частоту и продолжительность импульсов (при увеличенном сигнале рассогласования на выходе измерителя 1 изменение направлено на увеличение частоты и продолжительностн). Тем самым обеспечивается дополнительная возможность изменения быстродействия устройства в переходном процессе.
Таким образом, подключение корректирующего усилителя через дополнительный изодромный блок ко входам узла настройки демпфера и узла настройки импульсного элемента обеспечивает переменное быстродействие устройства с широкими возможностями получения требуемого качества переходных процессов.
Формула изобретения
Система для автоматического регулирования инерционного объекта, содержащая измеритель рассогласования, выход которого соединен, с корректирующим релейным усилитеттем и последовательно (гЬединенными демпфером, основным релейным усилителем и изодромным блоком, вход - с вЪ1ходами задатчика и датчика, ко входу которого подключены последовательно соединенные исполнительный орган и инерционный объект, а к управляющему в.ходу демпфера подсоединен узел настройки демпф ра, отличающаяся тем, что, с целью улучшения качества переходных процессов и повькиения надежности, система снабжена ИМПУЛЬСным элементом, узлом настройки импульсного элемеита и дополнительным изодромным блоком, вход которого подключен к выходу корректирующего релейиого усилителя, а выход соединен с узлом настройки демпфера и узлом настройки импульсиого элемеита. выход которого подключен к управляюшеМу входу импульсиого элемента, вход которого подключеи к выходу основного нзодромного блока, а выход - к нснемнитель ному органу.
Источники информации, принятые во внимание при экспертизо:
1.Хлыпало Е. И. Нелинейные снгтемм автоматического регулирования. Л., «Эиергая, 1967. рис. 4-70.
2.Авторское свидетельство СССР № 466488, кл. G 05 В 11/06, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2395704C1 |
| ИНТЕГРИРУЮЩИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2177168C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2332581C1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Устройство для управления инер-циОННыМ Об'ЕКТОМ | 1978 |
|
SU796788A1 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| Устройство для автоматического управления инерционными объектами при ограничении управляющего воздействия | 1979 |
|
SU864245A2 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
