54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Система автоматического регулирования | 1978 |
|
SU752221A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
1
Изобретение относится к автоматическому регулированию и может быть использовано для управления инерционным объектом с изменяющимся нерегулируемым параметром, например электроприводом с произвольным изменением нагрузки.
Известно устройство для управления инерционным объектом, содержащее последовательно соединенные усилительпреобразователь и исполнительный орган, соединенный с объектом управления, измеритель рассогласования, вхо которого соединен с входом усилителя-преобразователя и сЪбъёктом управ ления, выход - с входами дифференциатора, усилителя, коммутатора и релейного элемента Г| .
Известное устройство имеет низкую точность управления, обусловленную наличием дифференциатора и релейного элемента с характеристикой петлевого типа и отсутствием упреждающей адаптации к изменяющимся нерегулируемьш параметрам объекта управления.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для управления инерционным объектом, содержащее блок задания и связанный
с ним двумя входами и двумя выход ми блок настройки. Блок задания формирует управляющее воздействие по пропорционально-интегральному закону с автоматической настройкой коэффициентов по критерию минимума среднеквадратичного отклонения регулируемой величины от заданной {2.
Однако точность управления данно-
0 го устройства низкая из-за того, что коэффициенты регулятора подстраиваются по сигналу рассогласования после начала переходного процесса, а также за счет наличия большого количества
5 нелине,йных звеньев деления и умножения в блоке настройки.
Цель изобретения - повышение точности «управления за счет коррекции сигнала управления сигналом изменяю0щегося нерегулируемого параметра объекта управления.
Поставленная цель достигается тем, что в устройство введен датчик нере5гулируемого параметра объекта управления и два функциональных преобразователя, входы которых соединены с выходом датчика нерегулируемого параметра, а выходы - со вторыми входами первого и второго усилителей.
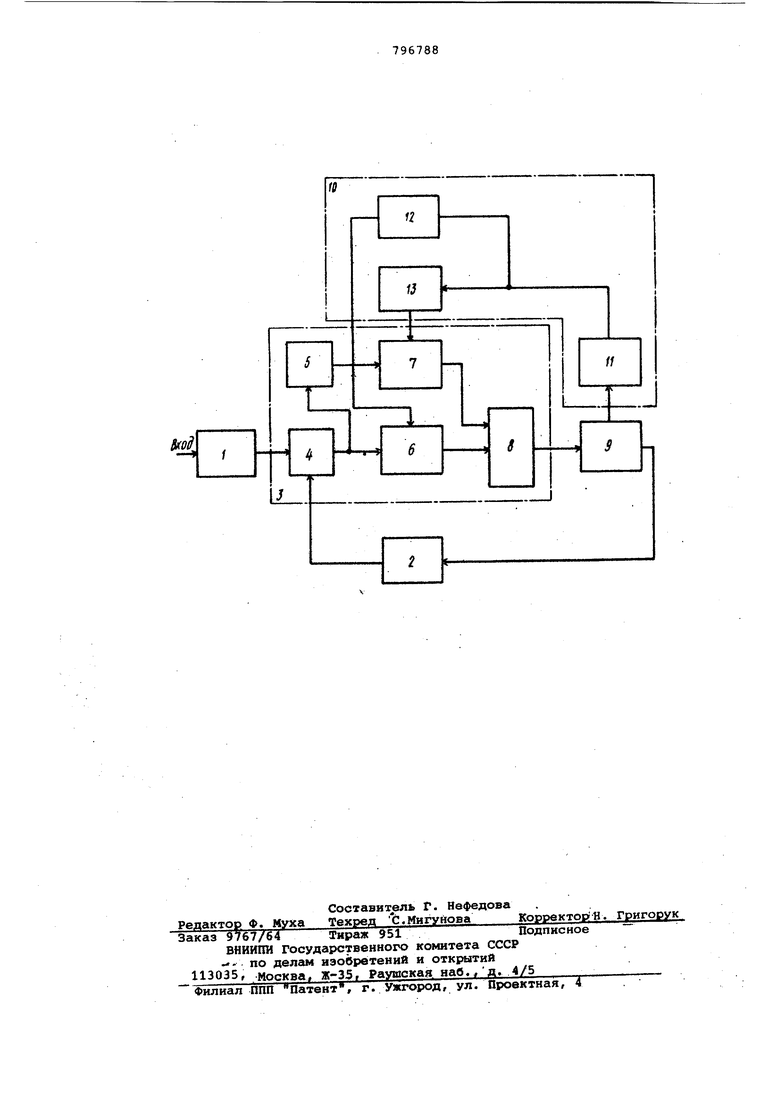
0 На чертеже представлена блок-схема устройства для управления инерцион ным объектом. Устройство содержит блок 1 задания датчик 2 обратной связи, блок 3 формирования сигнала управления, вклюдающий измеритель 4 рассогласования. Интегратор 5 и первый и второй усили гели 6 и 7, сумматор 8 и объект 9 управления, блок 10 настройки, включающий датчик 11 нерегулируемого параметра и функциональные преобразова тели 12 и 13. Устройство работает следующим образом. Выходные сигналы блока 1 задания и блока 2 обратной связи поступают н вход изг ерителя 4 рассогласования. Разностный сигнал, полученный на его выходе, поступает на пропорционально интегральный регулятор, состоящий из интегратора 5, усилителей 6 и 7, сум матора 8 и имеющий передаточную функ цию.; (с.- -1-Kla lL-JsSlL - То5 где К - передаточный коэффициент ус лителя б; - - ко: ффициент передачи после о довательно соединенных интегратора 5 и усилителя 7; - постоянная времени регулято ра. Передаточные коэффициенты К Hl/T автоматически подстраиваются в функции изменяющегося нерегулируемого параметра, например, тока при регулиро вании скорости электропривода. Устройство контролирует изменяющуюся нагрузку, посредством датчика 11 нерегулируемого парш 1етра и через функциональные преобразователи 12 и 13 производят настройку передаточных коэффициентов К, и 1/1 (пропорциональ ной и интегральной частей функции регулятора). Таким образом, постоянная времени регулятора Тр изменяется адекватно электромеханической постоянной времени электропривода, полностью компенсируя ее инерционное действие. При таком управлении остается некомпенсированной только малая постоянная времени Тд, которую можно в дан ном устройстве изменять в зависимости от технологических требований к качеству пepexoдF oгo процесса. При изменении двух постоянных времени в объекте управления, например, электромагнитной и электромеханической, соответственно от изменений нагрузки и скорости электродвигателя, коррекция по этим параметрам осуществляется путем введения дополнительного блока настройки (т.е. дополнительно вводят датчик нерегулируемого параметра и два функциональных преобразователя). По контролируемой нагрузке через функциональные преобразователи корректируют параметры контура скорости, а по контролируемой скорости - контура тока. В результате корректирования параметров регулятора повышается точность регулирования, что позволяет оптимизи-. ровать переходные процессы в электроприводе, снизить избыточные динами 1еские усилия в передающих механизмах, а также уменьшить перегрузки электродвигателя, что приводит к повышению сроков их службы. Формула изобретения Устройство для управлен §я инерционным объектом, содержащее блок задания, датчик обратной связи, подсоединенные ко входам измерителя рассогласования, выход которого через первый усилитель и последовательно Соединенные интегратор и второй усилитель соединен с соответствующими входами сумматора, выходом подсоединенного к объекту управления, .о т личающееся тем, что, с целью повышения точности управления, в него введен датчик нерегулируемого параметра объекта управления и два функциональных преобразователя, входы которых соединены с выходом датчика нерегулируемого параметра, а выходы - со вторыми входами первого и второго усилителей. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 519683, кл. G 05 В 13/02, 1976. 2.Авторское свидетельство СССР № 551607, кл. G 05 В 13/02, 1977 (прототип).
