(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ИНЕРЦИОННЬМИ ОБЪЕКТАМИ ПРИ ОГРАНИЧЕНИИ
I
Изобретение ртносится к автомати- ческому регулированию при наличии ступенчатых задающих воздействий, может быть применено для управления инерционными объектаьв, например электрическими приводами металлорежущих станков, динамика которых описывается дифференциальными уравнениями второго порядка без позиционного члена.
По основному авт.св. №334551 известно устройство для автоматического управления инерционными объектами при ограничении управляющего воздействия, содержащее последовательно соединенные усилитель-преобразователь и исполнительный орган, выход которого соединен со входом объекта управления, выход которого соединен со вторым входом усилителя-преобразователя, на первый вход которого подается задающее воздействие, формирователь сигнала ошибки, входы которого соединены с соответствующими вxoдa м уснпителя-тфеобразователя, а выход УПРАВЛЯЮЩЕГО ВОЗДЕЙСТВИЯ
соединен с первым входом сумматора и входом дифференциатора, выход которого соединен со вторым входом сумматора, выход которого через триггер соединен со вторым входом исполнительного органа l .
Недостатками устройства являются : низкое быстродействие, так как положение го линии переключения значительно отличается от положения линии,
10 оптимальной по быстродействию, возникновение автоколебаний и возможность потери устойчивости из-за наличия в замкнутом контуре регулирования релейного элемента.
15
Цель изобретения - повышение быстродействия устройства.
Поставленная цель достигается тем, что в устройстве установлен блок запуска, дополнительный сумматор, блок
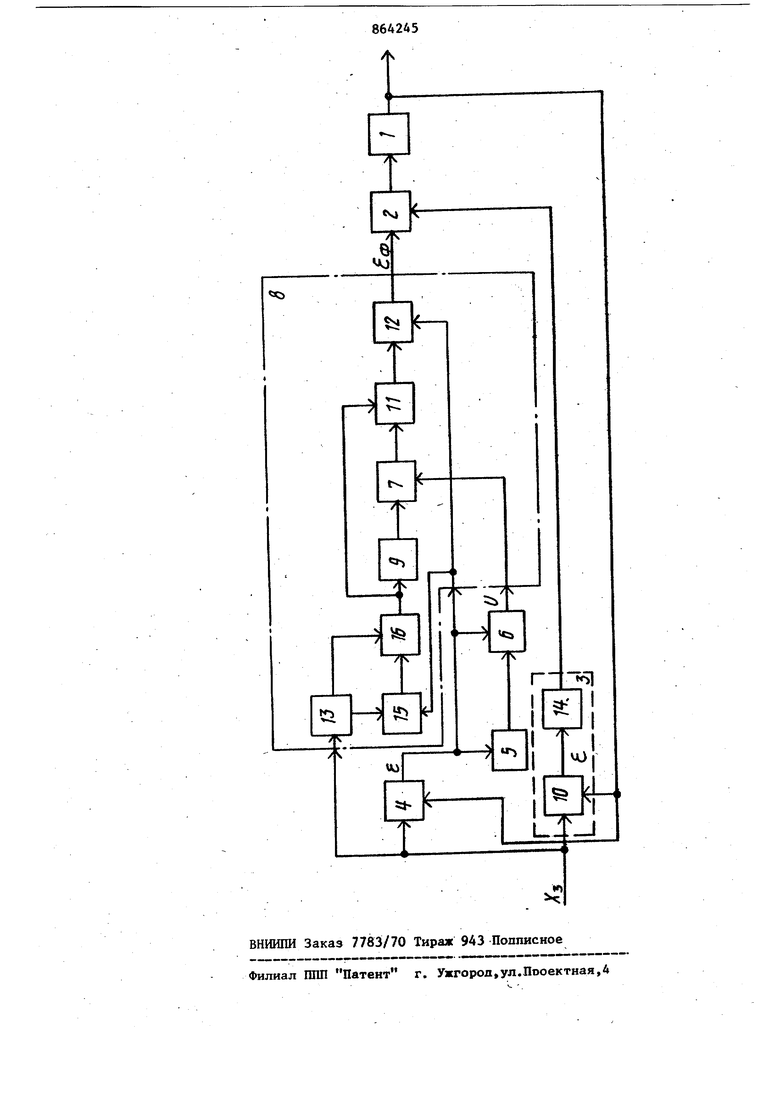
20 реверса и последовательно соединенные ключ, амплитудно-импульсный преобразователь и одновибратор, выход которого соединен со вторым входом триггера, подключенного выходом ко второму входу исполнительного органа через последовательно соединенные дополнительный сумматор и блок ревер са, второй вход дополнительного сумматора соединен с выходом амплитудно импульсного преобразователя, управля щий вход блока реверса соединен с сигнальным входом ключа и выходом фо мирователя сигнала ошибки, первьс ; вход которого соединен со входом бло к-а запуска, подключенного выходами к соответствующим управляющим входам ключа и амплитудно-импул ьсного преобразователя. Блок-схема устройства представле на на чертеже. Она содержит объект управления 1, исполнительный орган 2, усилительпреобразователь 3, формирователь сиг нала ошибки 4, дифференциатор 5, сум матор 6, триггер 7, коммутатор 8, одновибратор 9, измеритель рассогласования 10,дополнительный сумматор 11, блок реверса 12, блок запуска 13 блок усиления, преобразования и коррекции 14, хлюч 15, амплитудно-импул сный преобразователь 16, задающее воздействие X -t выходной сигнал сумматора 6, сигнал ошибки, , сигнал ф на выходе коммутатора 8. Рассмотрим функции, выполняемые отдельными структурными элементами устройства. Фop fl poвaтeль сигнала ошибки 4 совместно с дифференциатором 5 и сумматором 6 управляет работой триггера 7. Усилитель-преобразователь 3 усиливает сигнал ошибки и подает на исполштельный орган 2, который изме няет состояние объекта управления 1. Исполнительный орган 2 имеет характеристику типа насыщение. В состав усилителя-преобразователя 3 функционально входят измеритель рассогласования 10 и блок усиления преобразования и коррекции 14, характеристики которого выбираются в зависимости от характеристик исполнительного органа 2 и объекта управления 1, исходя из требований к дина мике регулирования. В простейшем слу чае, когда коэффициент передачи блока усиления, преобразования и коррекции 14 равен единице, усилительпреобразователь 3 и формирователь сигнала ошибки 4 становятся эквивалентными функциональныьи блоками, следовательно, их функции могут быть 5 совмещены, и в предлагаемом устройстве указанные функциональные блоки могут быть заменеге а одним функциональным блоком. Блок запуска i3 по переднему 4фонту ступенчатого задающего воздействия запускает амплитудно-импульсный преобразователь 16, а также выдает импульс, открываю1вд1й ключ 15. Выходной сигнал ключа 15 пропорционален по амплитуде сигналу опибки. Амплитудноимпульсный преобразователь 16 формирует импульс, длительность которо-. го линейно связана с амплитудой скачка задающего воздействия. Одновибратор 9 по заднему фронту импульса с выхода амплитудно-импульсного преобразователя 16 изменяет состояние триггера 7. В первоначальном состоянии триггер 7 обнулен. Блок реверса 12 формирует сигнал на втором входе исполнительного органа 2 с учетом знака сигнала ошибки. Устройство работает спедуиядам образом. На вход устройства, т.е. на первые входы усилителя-преобразователя 3 и формирователя сигнала ошибки 4 подается ступенчатое задающее воздействие 3На вторые входы указанных блоков подается сигнал обратной связи с выхода объекта управления I. В измерителе рассогласования 10 усилителя-преобразователя 3 задающее воздействие сравнивается с сигналом обратной связи и формируется сигнал ошибки, который затем, в случае необходимости, усиливается и преобразуется в соответствии с выбранным законом регулирования и блока усиления, преобразования и коррекции 14 и который затем подается на первый вход исполнительного органа 2. Кроме того, в формирователе сигнала ошибки 4 задающее воздействие сравнивается с сигналом обратной связи и формируется сигнал ошибки , который подается на сигнальный вход ключа 15. ., По переднему фронту скачка задающего воздействия блок запуска 13 открывает ключ 15 и запускает амплитудномпульсный преобразователь 16. Ампли-. тудно-импульсный преобразователь 16 формирует импульс отрицательной полярности, длительность которого пропорциональна амплитуде сигнала на выходе ключа 15. Импульс с выхода амплитудно-импул ного преобразователя 16 поступает че рез сумматор I1, на первый вход кото рого поступает нулевой сип-ал с триг гера 7, на сигнальный вход блока реверса 12, который формирует сигнал полярность которого формируется в соответствии с полярностью сигнала ошибки , , который подается на управляющий вход блока реверса 12 с выхода формирователя сигнала сквибки 4. Сигнал д) с выхода блока реверса 12 поступает на второй вход исполнительного органа 2. Управляющее воздействие на выходе исполнительного органа 2 формируется как сумма сигна лов на его входах. По заднему фронту импульса с выхо да амплитудно-импульсного преобразователя 16 одновибратор 9 устанавлива триггер. 7 в состояние Г. Выходной сигнал триггера 7 положительной полярности поступает на-первый вход сумматора 11, на второй вход которого поступает нулевой сигнал с выхода амплитудно-импульсного преобразовате ля 16. На выходе сумматора 11 в этом случае формируется сигнал положитель ной полярности, который затем поступает на сигнальный вход блока реверс 12. В результате чего полярность управляющего воздействия на выходе исполнительного органа 2 меняется на противоположную. Блок запуска 13 пов торно включается только при следующем скачке задающего воздействия. момент, когда комбинация л Е сигнала ошибки и его производно .станет меньше заранее заданной величины, триггер.7 переключается в состояние о по сигналу с сумматора 6 В этом случае сигнал станет ра вен нулю. В дальнейшем управляющее воздействие на выходе исполнительного органа 2 будет линейно зависеть от сигнала ошибки, поступающего с выхода усили теля-преобразователя 3. Момент t смены знака управляющего воздействия будет определяться характеристикой амплитудно-импульсного преобразователя 16 и для объекта, описываемого выражением х +х (Р, будет линейно зависеть от величины задающего воздействия. При этом Ц-Ц + tr , где t - пос тоянное запаздывание объекта управлеполучается реше1шем снегемы уравнений ix kK+Xg. , X k -- -i. скачок задающего воздействия, х - задающее воздействие до скачка, k - козффициент передачи амп-. литудно-импульсного преобразователя. Из приведенных соотношений видно, что характеристика амплитудно-импульсного преобразователя 16 носит линейный характер. i Момент смены знака управляющего воздействия на выходе исполнительного органа 2 будет линейно зависить от скачказадающего воздействия. Учет запаздывания объекта управления 1 не изменяет линейности характеристики амплитудно-импульсного преобразователя 16. Однако, на фазовой плоскости изменением величины запаздывания и х можно добиться чтобы положение линии переключения незначительно отличалось от оптимального. Предложенное устройство обеспечивает переходные процессы, близкие к оптимальным по быстродействию. Это объясняется тем, что в закон управле131я вводится запаздывание объекта управления, которое учитывается в характеристике амплитудно-импульсного преобразователя 16. Введение запаздывага1Я в закон управления позволяет получить линию переключения, по положению незначительно отличающунюя. . от оптимальной. Использование предложенного устройства дня управления электроприво-. водами станков которых можно огшсать дифференциальным уравнением второго порядка без позиционного члена X 4 X « f, позволит в три раза увеличить их производительность за счет повышения быстродействия устройства на пять процентов сравнительно простыми aппapaтypны w ,редcтвa вl. Формула изобретения Устройство для автоматического правления ииepциoвIШ в объектами
при ограничении управляющего воздей ствня по авт.св. № 334551, отличающееся тем, что, с целью повышения быстродействия, в нем установлены блок запуска дополнительный сумматор, блок реверса и последовательно соединенные ключ, амплитудно-импульсный преобразователь и одновибратор, выход которого соединен со вторым входом триггера, подключенного выходом ко второму входу исполнительного органа через последовательно соединенные дополнительный сумматор и блок .реверса, второй вход дополнительного сумматора соединен с выходом амплитудноимпульсного преобразователя, управляющий вход блока реверса соединен с сигнальным входом ключа и выходом
формирЬвателя сигнала ошибки, первый вход которого соединен со входом блока запуска, подключенного выходами к соответствуюиим управляющим входам ключа и амплитудно-импульсного преобразователя..
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 334551, кл. G 05 В 13/02, 1971
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1979 |
|
SU830299A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Система управления измельчительным агрегатом | 1982 |
|
SU1101302A1 |
| Устройство для регулирования температуры | 1986 |
|
SU1403025A1 |
| Способ управления электродвигателем с вентильным преобразователем и устройство для его осуществления | 1990 |
|
SU1833956A1 |
| Устройство для программного управления | 1976 |
|
SU566241A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| Импульсный регулятор | 1982 |
|
SU1101787A1 |