1
Изобретение относится к области автоматического-регулирования и может быть исггользоваио при автоматизации производственных процессов.
Известны пропорциоиально-интегрально-дифференциальные (ПИД) регуляторы, содержащие трехпозиционный релейный блок, охваченный функциональной обратной связью, и интегратор в виде исполнительного механизма постоянной скорости (1J,
Недостатком таких регуляторовявляется их низкая точность, связанная с ограниченным диапазоном постоянной времени дифференцирования.
Повышение точности таких регуляторов может быть достигнуто за счет изменения сигнала обратной связи 2, 3J.
Наиболее близким- по технической сущности к .изобретению является пропорционально-интегрально-дифференциальный регулятор, содержащий первый сумматор, первый вход которого через дифференциатор и второй сумматор соединен с первым входом третьего сумматора, а выход - через релейный блок - с входом интегратора и вторым входом третьего сумматора, выход которого соединен со вторьтм вводом первого сумматора 4.
Недостатком известного регулятора является его низкая точность.
Целью изобретения является повышение точности регулятора.
Это достигается тем, что в предлагаемом регуляторе выход третьего сумматора со1единен со вторым входом второго сумматора.
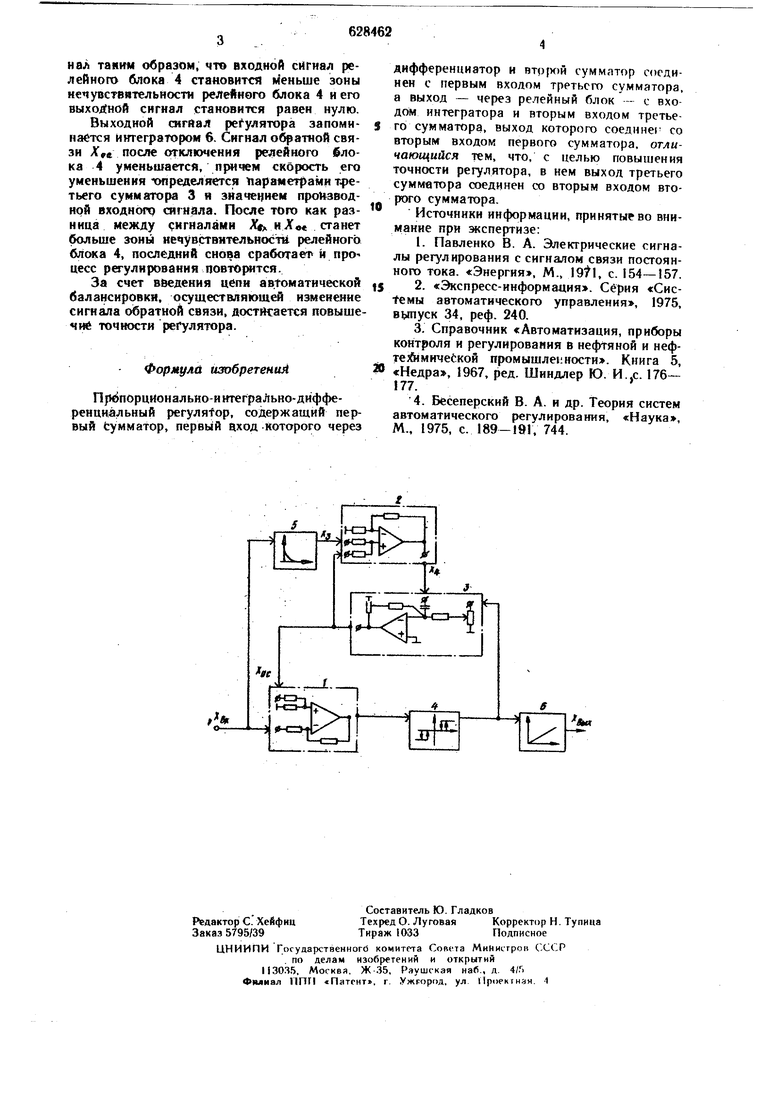
Функциональная схема описываемого регулятора представлена на чертеже, где f,2,3 первый, BTopqH и третий суммлторы, 4 - релейный, блок, 5 - дифференциатор, 6 - интегратор, Хе;,:--входной сигЕ{ал регулятора, А й/л-выходной сигнал регулятора, - «в-сигнал обратной связи регулятора.
Регулятор работает следующим образом.
Входной сигнал, пройдя через сумматор 1, поступает на вход релейного блока 4, который управляет интегратором 6. ВыходРЮЙ сигнал интегратора 6 является выходным сигналом регулятора. Одновремсн)о сигнал с выхода релейного блока 4 подается Е цепь отрицательной обратной связи. Сигнал .,« обратной связи компенсирует входной сигнал таким образом, что входной сигнал релейного блока 4 становится Меньше зоны нечувствительности релейного блока 4 н его выхо|(ной снгнал становнтся равен нулю.
Выходной сигйал регулятора запомнпаётся интегратором 6. Сигнал обратной связи Xfe. после отключения релейного блока 4 уменьшается, скорость его уменьшения определяется параметрами тц)етьего сумматора 3 я значением про14зводирй входнОгр сигнала. После того как разница между сигналами Л«х и Х«с станет больше зоны нечувствительности релейного (блока 4, последний снова сработает и процесс рв-улнрования ПОВТО1ЖТСЯ.
За счет в&едения цепи автоматической балансировки, осуществляющей измененне сигнала обратной связи, достйсается повыше4Jrt точности регулятора.
Формула изобретений
ПрёпорцИонально-интегрально-дифференцнальный регулятор, содержащий первый Сумматор, первы й аход -которого через
дифференциатор и втр{к)й сумматор соединен с первым входом третьего сумматора, а выход - через релейный блок - с входом интегратора н вторым входом третьего сумматора, выход которого соединен со вторым входом первого сумматора, отличающийся тем, что, с целью повышения точности регулятора, в нем выход третьего сумматора соединен со вторым входом второго сумматора.
Источники информации, принятые во внимание при жспертизе:
1.Павленко В. А. Электрические сигналы регулирования с сигналом связи посгоянного тока. «Энергия, М., 19tl, с. 154-157.
2.«Экспресс-информация. Серия «Системы автоматического управления, 1975, выпуск 34, реф. 240.
3.Справочник «Автоматизация, приборы контроля и регулирования в нефтяной и нефтеЙ1мичеСкой промышленности. Книга 5,
«Недра, 1967, ред. Шиндлер Ю. И..с. 176- 177.
4. Бесеперский В. А. и др. Теория систем автоматического регулирования, «Наука, М., 1975, с. 189-191, 744.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пропорционально-интегральнодифференциальный регулятор | 1977 |
|
SU696410A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120654C1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ | 1973 |
|
SU392457A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2622183C2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| Многоканальный регулятор | 1986 |
|
SU1388840A1 |
| Пропорционально-интегральныйРЕгуляТОР | 1979 |
|
SU809058A1 |
| Система управления | 1979 |
|
SU842722A1 |
| АДАПТИВНАЯ НЕЛИНЕЙНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1990 |
|
RU2027212C1 |
Аа
