(54) ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Импульсный регулятор | 1984 |
|
SU1238025A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| Импульсный регулятор | 1984 |
|
SU1251025A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1998 |
|
RU2120654C1 |
| Релейная система управления | 1980 |
|
SU962850A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Следящая система | 1981 |
|
SU962847A1 |
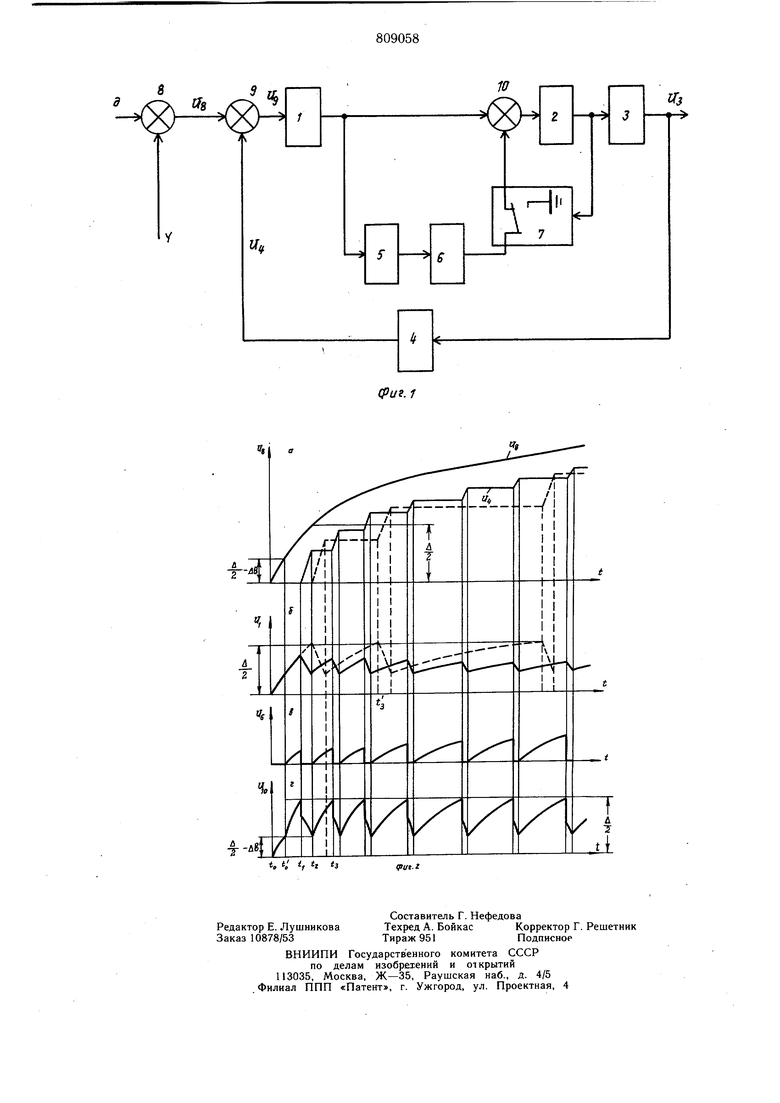
Изобретение относится к пропорционально-интегральным (ПИ) регуляторам с отключением интегральной составляющей и мо жет найти применение при автоматизации управления производственными процессами широкого типа. Известны ПИ-регуляторы, содержащие параллельно соединенные формирователи пропорциональной (П) и интегральной (И) составляющих закона регулирования, выходы которых через сумматор и преобразователь соединены со входом исполнительного механизма, причем в цепи формирования И-составляющей таких регуляторов устанавливается переключатель, который в зависимости от контролируемых сигналов (например, величины суммарного сигнала пропорциональной и интегральной составляющих закона регулирования) осуществляет отключение И-составляющей в процессе регулирования 1, 2, 3. Наиболее близким по технической сущности к предлагаемому является пропорционально-интегральный регулятор, содержащий последовательно соединенные измеритель рассогласования, первый сумматор, усилитель, второй сумматор, релейный блок и исполнительный механизм, выход которого через блок обратной связи соединен со вторым входом первого сумматора и последовательно соединенные интегратор и переключатель, управляющий вход которого соединен с выходом релейного блока, а выход со вторым входом первого сумматора, и последовательно соединенные интегратор и переключатель, управляющий вход которого соединен с выходом релейного блока, а выход со вторым входом второго сумматора 4. Недостатком известного регулятора является его недостаточная точность. Цель изобретения - повышение точности регулятора. Поставленная цель достигается тем, что в регуляторе установлено нелинейное корректирующее звено, вход которого соединен с выходом усилителя, а выход со входом интегратора. На фиг. 1 представлена блок-схема регулятора; на фиг. 2 - диаграммы выходных сигналов блоков регулятора. Регулятор содержит усилитель 1, релейный блок 2, исполнительный механизм 3, блок 4 обратной связи, нелинейное корректирующее звено 5, интегратор б, переключатель 7, измеритель сигнала рассогласования 8, первый и второй сумматоры 9 и 10. На фиг. 1 и 2 приняты следующие обозначения: Vi- сигнал на выходе i-oro функционального блока регулятора, Д, Ле соответственно величина зоны нечувствительности и зоны неоднозначности релейного блока 2; д - сигнал задания; у - регулируемая величина; пунктиром показана диаграмма работы регулятора без нелинейного корректирующего звена 5. Регулятор работает следующим образом. В момент времени to (фиг. 2а) начинается изменение регулируемой величины J. На сумматор 10 и на нелинейное корректирующее звено 5 (например, блок с зоной нечувствительности, осуществляющий ограничение нижнего уровня сигнала) усилителя 1 поступает сигнал U U3-Uy. От момента tg до t обратная связь не работает, так как исполнительный механизм 3 не включен. Нелинейное корректирующее звено 5 пропускает на вход интегратора 6 сигнал,. превь щающий заданный уровень (в рассматриваемом случае этот сигнал больще --Л- - Дв, где - половина зоны нечувствительности релейного блока 2, Дв - зона неоднозначности этого блока. В момент to (фиг. 2а) на интегратор 6 поступает сигнал с нелинейного корректирующего звена 2, и он начинает вырабатывать сигнал Ue Кб (в данном случае АС U: - (в), что и показано на временной диаграмме (фиг. 2в). На сумматор 10 поступают.сигналы U К ЛХи Uв Kвjдcdt (фиг. 2в). Когда сигнал C/IP + достигает величины -f- (фиг. 2г), происходит срабатывание релейного блока 2 и в момент t, исполнительный механизм 3 перемещает регулирующий орган. Одновременно включается блок 4 обратной связи (фиг. 2а). В этот же момент t (фиг. 2в) релейный блок 2, с по.мощью переключателя 7 отключает интегратор 6 от усилителя 1 и гасит выходной сигнал интегратора 6 (т.е. шунтирует выходной конденсатор интегратора на землю) . При уменьщении сигнала на входе релейного блока 2, ниже величины , в момент t, исполнительный механизм 3 останавливается, блок обратной связи от: ключается, а переключатель 7 подключает интегратор 6 на вход сумматора 10. Далее процесс повторяется. Нелинейное корректирующее звено 5 пред-, назначено для регулировки интенсивности работы интегратора 6, а также для того, чтобы при очень медленно -изменяющемся в.ходном сигнале U g сумма U/Q, K-fAx-f 4-K JAcdt не достигла бы величины (т.е. не включился бы исполнительный механизм 8 в тот момент, когда Kt Л0), так как в этом случае может наблюдаться звонковый эффект релейного блока 2. Как видно из фиг. 2, введение нелинейного корректирующего звена 5 позволяет значительно повысить интенсивность работы регулятора (без увеличения частоты включений исполнительного механизма 8 по сравнению с номинальной), и, тем самым, увеличить точность регулятора на . Формула изобретения Пропорционально-интегральный регулятор, содержащий последовательно соединенные измеритель рассогласования, первый сумматор, усилитель, второй сумматор, релейный блок и исполнительный механизм, выход которого через блок обратной связи соединен со вторым входом первого сумматора, и последовательно соединенные интегратор и переключатель, управляющий вход которого соединен с выходом релейного блока, а выход - со вторым входом второго сумматора, отличающийся тем, что, с целью повышения точности регулятора, в нем установлено нелинейное корректирующее звено, вход которого соединен с выходом усилителя, а выход - со входом интегратора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 521551, кл. G 05 В 13/02, 02.07.74. 2.Авторское свидетельство СССР JSfo 484496, кл. G 05 В 13/02, 18.11.68. 3.Патент США № 3938017, кл. 318-610, опублик. 10.02.76. 4.Емельянов С. В. Система автоматического управления с переменной структурой. М., «Наука, 1967, с. 39, 303-326, (прототип). - i
