В 1936 году автором была предложена система управления копировально-фрезерным станком (авторское свидетельство № 52363), обладающая по cpaiBHeHHTO с известной американской системой «Келлер рядОМ производственных и эксплоатационных цреимущеста.
В течение последующих лет эта система подвергалась непрерывному исследованию и. усовершенствованию и в настоящее время применяется на серийных копировальнофрезерных станках. Длительный опыт работы с этой системой показал, что для дальнейщего повыщения производительности копи.рсвалъньих станков необходимо pe3j кое увеличение рабочих скоростей подачи. Для того чтобы добиться точной и устойЧивОй работы станка на высоких скоростях подачи, превышающих В 1,5-2 раза скорости станков тила «Келлер, оказалось необходи-мым ввести- в схему управления станко(м ряд существенных принципиальных изменений. В основном эти изменения касаются конструкции копировальной головки и принципа её действия.
Предметом настоящего изобретения является устройство для автоматического управления копировальным металло-режущим стариком с использованием копировальной головки, снабжённой контакта1ми для управления механизмами станка с поМощью тиратронов И т. п.
Особенность предлагаемого устройства заключается в том, что указанные контакты копировальной головки выполнены вибрирующ-иэди под действием двух электромагнитов, подключённых к якорям двигателей подачи, с целью повышения точности и устойчивости работы при высоких подачах.
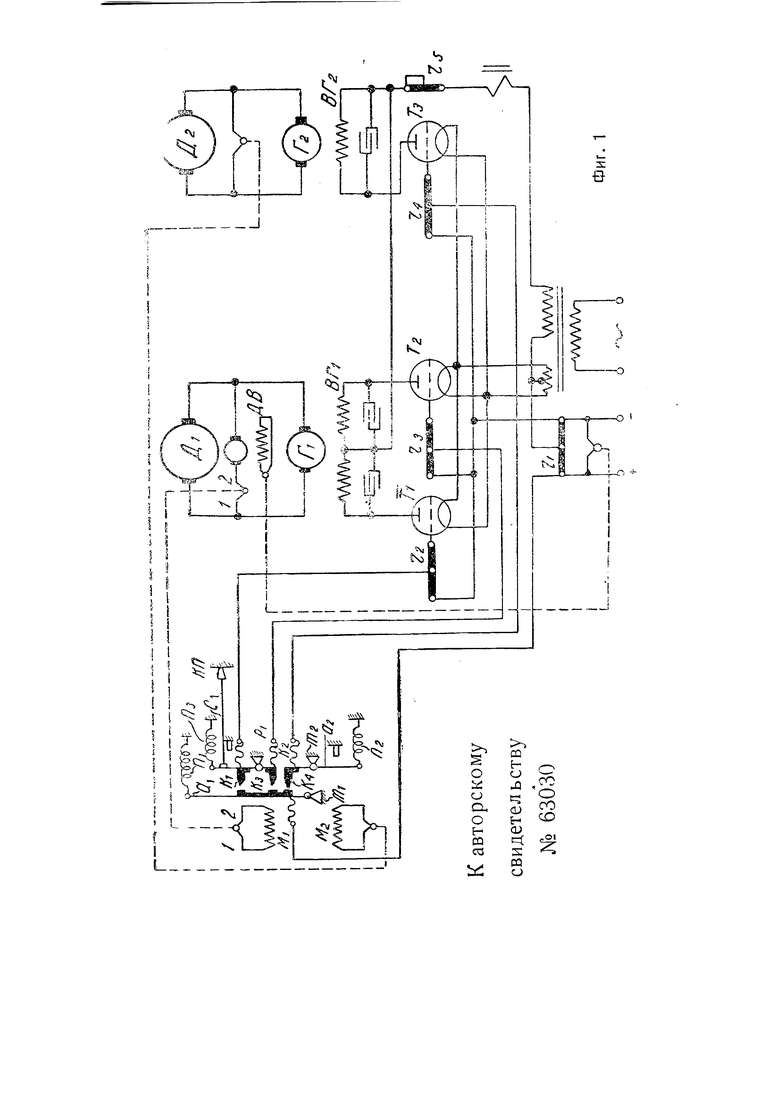
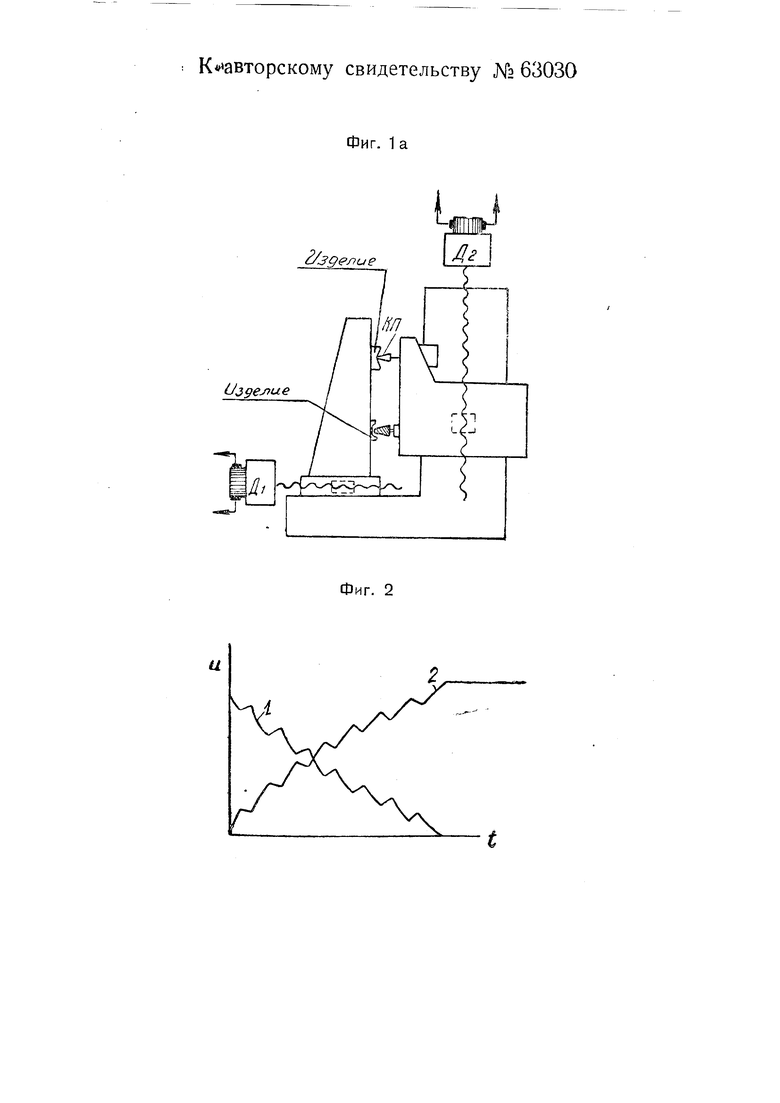
На чертеже фиг. 1 и 1а изображают схему Предлагаемого устройства, фиг. 2-5 поясняют цействие его.
Ниже приводится описание конструкции HOBoii копировальной головки и схемы её включения в той части, в которой она отличается от ранее предложенной и описанно) cxeмыi (списание к авторскому свидетельству Л 52363).
На фиг. приведён один из возможных вариантов применения копировальнои головки новой конструкции при .питании двигателей подачи по системе Леонарда. Основной частью новой копировальной головки являются электромагниты Ml и Мг, питаемые от налряжения на щётках двигателей подачи Дх и Д2. При паявлении тока в обмотках электромагнитав последние притягивают Я)корьюи ail, а2, которые могут ка1чаться около неподвижных опор mi, m2. Притяжению якорьков препятствуют пружины ni и Пг. Магнитные системы электромагнитов устроены таким образом, что .перемещение якорьков относительно электрОМагнитав пропорционально напряжению на обмотках последних, а, следовательно, напряжению на Щётках двигателей подачи. Если пренебречь падением напряжения в обмотках якорей двигателей подачи, то можно считать, что перемещение якорьков пропорционально скорости соответствующей подами. Каждый якорёк несёт на себе нзолироваиные от корпуса контакты. Связь отдельных контактов с якорьками ясна из фиг. 1 чертежа. Кроме контактов, связанных с якорьками, головка имеет ещё контакты Ki и К2, укреплённые па качающемся рычаге Pi. Последний отклоняется ири oceBOMi перемещении стержня Ci, на втором конце которого крепится копировальный палец КП, перемещающийся но модели.
PaccMOTpHiM работу данной головки. Допустим, что Bi начальный момент кояировальный палец КП не достаёт до модели и происходит П}родольная вперёд по направлению к последней. При этом якорёк ai будет притянут адагнитогм Ml, а контакты К2 - Кз зашкнуты. Замыкание контактов влечёт за собой подачу положительного потенциала на сетку тиратрона Т2 в цепи возбуждения BFi генератора Ei. Генератор Fi возбуждается и подаёт питание на двигатель Дь Вторая составляющая подачи, обслуживаемая двигателем Д2, будет отсутствовать, так как тиратрон Тз остаётся занертым благодаря разрыву ;КОНтактОВ Кз - KI- Допустим, что
копирова)льный палец медлекно приближается к участку модели, поверхность которого перпендикулярна ООН стерЖНЯ Сь Начиная с мамента соприкосновения пальца КП с моделью, рычаг Pi начинает отклоняться влево, преодолевая натяжение пружины пз. В результате перемещения pbraaira Pi разрыва1отся контакты К2 - Кз, тиратрон TS тухнет и начинается уменьщение напряжения генератора Fi. Спадание на пряжения генератора Fi вызывает уменьщение тягового усилия электромагнита Mi.
Вследствие этого якорёк ai отклоняется вправо под действием пружины П1 и снова замыкает контакты К2 - Кз. Продолжающееся движение рььчага Pi влево и.уве тичение напряжения генератора Fi, вызва)нное замыканием контактов К2 - Кз, вызывают повторный разрыв контактов К2 - Кз. Затем-контакты К2-Кз снова замыкаются, но уже при меньщем напряжении генератора FI. Таким образом изменение напряжения генератора Fi, после саприкосновения копировального пальца с моделью, происхОДит по кривой 1 (фиг. 2).
Раюсм оприм теперь процесс изменения напряжения генератора F2. Отклонение якорька ai вызывает замыкание контактов Кз-К4, зажигание тиратрона Тз и возрастание напряжения генератора F2. Возрастание напряжения генератора F2 вызывает разрыв контактов Кз-К4 вследствие дритяжения якорька электромагнитом М2, а затем следует повторное замыкание этих контактов. Так как якорёк ai непрерывно отклоняется вправо, то повторные ра1зм1ыкания контактов Кз- К будут происходить каждый раз при большем напряжении. Результирующее изменение напряжения генератора F2, после солрикосновекш копировального пальца с моделью представлено кривой 2 (фиг. 2).
При среднем положении рычага PI контакты К2 - Кз окончательно разомкнутся, а контакты Кз - К4 замкнутся.
Так как кривые изменения числа
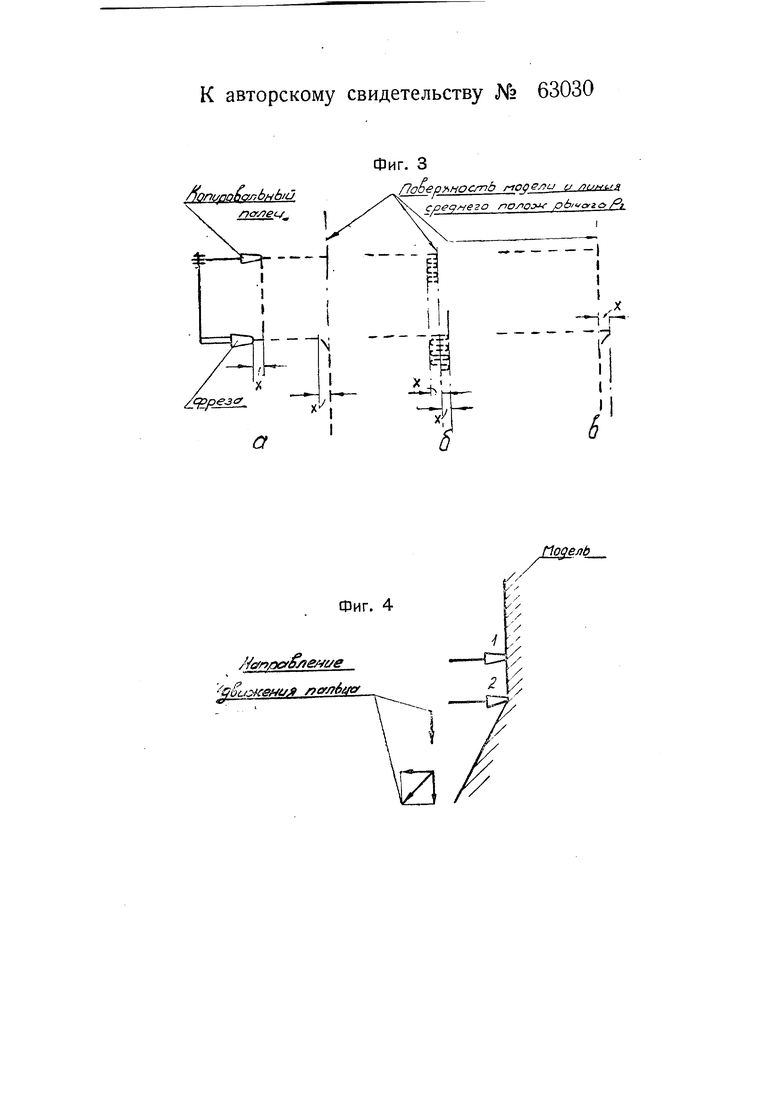
оборотов двигателей подачи будутещё более сглажены, то можно считать, что при медленном1 сОПрикосновении копировального пальца с моделью продольная подача; по направлению к модели будет плавно переходить в другую составляющую (например, в вертикальную). Пути, проходимые при этом концом копировального пальца и концом фрезы, представлены на фиг. За, на кото-рой буквой X обозначена величина хода копировального пальца от момента сопрНкосногвения с моделью до среднего положения рычага Р).
Перейдём к рассмотрению процесса соприкосновения ко пировального пальца с моделью при движении его с большей скоростью. В это1М случае путь, проходимый всей системой при торможении, оказывается больше величины X, и рычаг Pi отклоняется влево за среднее положение. При этом за:мыкаются контакты Ki-Кз, зажигается тиратрон Ti, меняется полярность напряжения генератора Fi и направление вращения двигателя Дь
Так как всякая механическая система имеет некоторый мёртвый ход, то разгон двигателя Д1 iB обратном направлении в начале будет происходить вхолостую, при неподвижно-м стержне Ci.
Если за время выбора мёртвого хода двигатель Д1 развернётся до установившегося числа оборотов, то вслед за тем1 копировальный палец оторвётся от модели, .рычаг Pi резко отклонится вправо и saMiкнутся контакты К2-Кз, включающие подачу вперёд (к (модели). Пути, проходимые при концом копировального пальца и концом фрезы, представлены на фиг. 36.
Из фкг. 36 ясно, что рассмотренный процесс приводит к появлению незатухающих колебаний. Для устранения этого явления, делающего нормальную ряботу станка, невозможной, неабходимо применять какие-либо противоколебательные устройства. В предлагаемой схеме в качестве подобного устройства применена маленькая машина постоянного тока ДБ (фиг. 1). Обмотка возбуждения этой машины включена на постоянное напряжение, а якорь - последовательно с обматкой электромагнита Mi.
При наличии противоколебательного устройства процесс соприкосновения копировального пальца с моделью происходит следующим образом. Вначале, когда копировальный палец приближается к модели, машина ДВ работает в качестве двигателя. При этом напряжение на обмотках электромагнита Mi равно разности напряжения генератора и напряжения на щётках мащины ДВ. Копировальный палец, быстро подходит к модели и, упираясь в неё, отклоняет рычаг Pi влево так же, как это было В предыдущем случае. Копта1кты Ki-Ка замыкаются и полярность генератора Fi изменяется. Так как вспомогательная машина ДВ продолжает по инерции вращаться в прежнем направлении, то оказывается, что Напрял евие на обмотке электромагнита делается равным сумме напряжений генератора Fi и мащины ДВ. Благодаря этол1у разрыв контактов Ki - Кз происходит при значительно меньших напряжениях генератора FI и, следовательно, процесс разгона двигателя Д1 в обратном направлении будет замедлен. ВелЧчина замедления зависит от соотношения напряжений генератора Fi и машины ДВ, а также от величины махового момента вращающихся частей мащины ДВ. Маховой момент машины ДВ может быть увеличен путём насадки М1аховика на её вал. Регулируя противоколебательное устройство, можно добиться того, чтобы процесс соприкосновения копировального пальца с моделью имел вид, представленный на фиг. Зв.
Рассмотрим теперь, каким образом происходит движение по поверхности Модели, наклонённой под некоторым углом к оси копировального пальца. Пусть в исходный момент палец движется вниз по поверхности, перпендикулярной к его оси, занимая положение 1 (фиг. 4). Начиная с точки 2, давление на
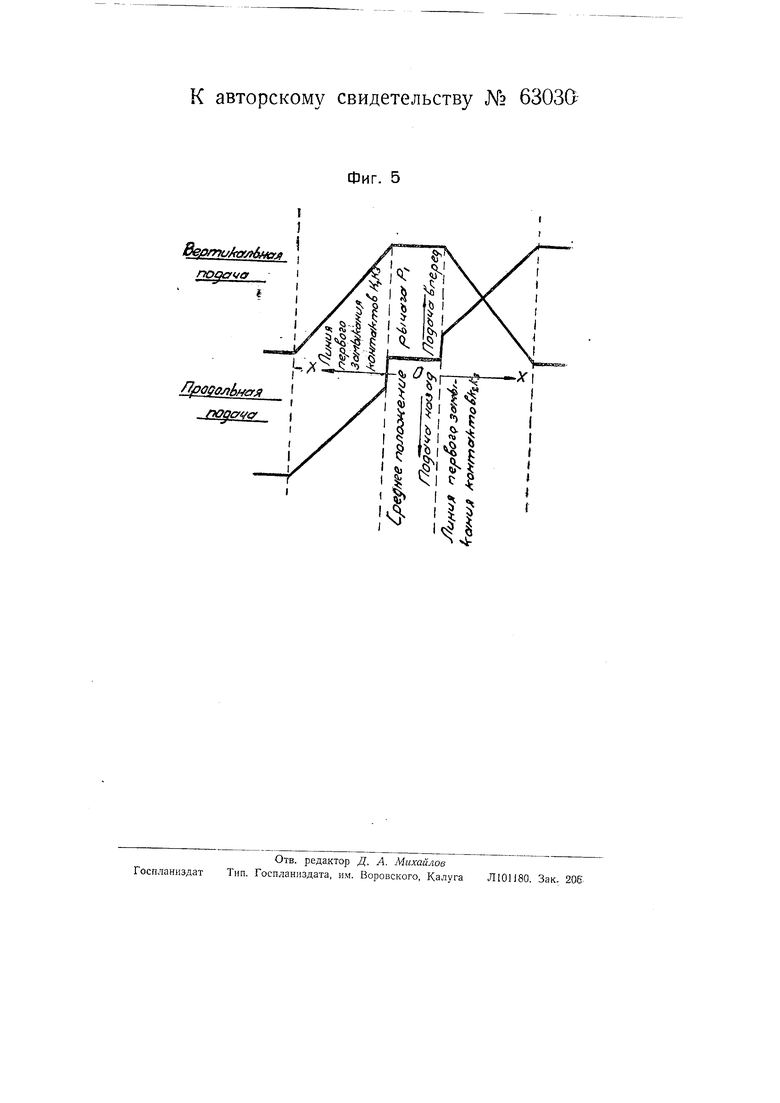
копировальный палец начинает увеличиваться и замыкаются контакты Ki-KS; однов ремеино происходит разлгыкаиие контактов Кз-К4. В результате этого зам едляется движение вниз и появляется движение назад. Рычаг Pi отклоняется влево под действием копировального пальца до тех пор, пока скорости д(вижен«1Й БЛИЗ и назад не приобретут установившихся значений, €оответств.уюш;их профилю поверхности модели в данном месте. При этом напряжения генераторов подач будут колебаться около каких-то средних значений, вследствие неггрерывной вибрации якорьков ai и 32. Очевидно, что каждому наклону прОфиля Модели будет соответствовать ошределённое соотношение скоростей обеих составляющих подач, определённое положение рычага Pi и вибрирующих якорьков. При движении пальца по криволинейно му профилю положение рычага Pi и составляющие скорости подачи будут непрерывно меняться.
На фиг. 5 представлена зависимость между отклонеииями рычага PI от средиего положения и скоростями подачи, поясняющая вышеизложенное.
Таким образом рассмотренная схема, сохраняя простоту и надёжность работы простейшей схемы двухпозиционного регулирования, позволяет .получить устойчивое и плавное регулирование скорости двигателей подачи.
Предварительные лабораторные испытания схемы дали бла гоприятные результаты и она положена в основу проектирования электрооборудован.ия иовых копировальнофрезернЫХ станков.
Предмет изобретения
Устройство для автоматического управления копировальным металлорежущим стаиком с использованием копировальной головки, снабжённой контактами для управления механизмами стайка с помощью тиратронов и т. п., о т л и ч а ю Щ; е е с я тем, что указанные контакты копировальной головки вьшолнеиы вибрирующи(ми под действием двух электромагнитов, подключённых к якорям двигателей подачи, с целью повышения точности и устойчивости работы при высоких подачах.
Фиг. 1а
Фиг. 2
I
Фиг, 3
/lobepif i-iocrnb /-fOO -f u .1я среднего поло рЬ/и1угс /- г
4;:
/
4
Фиг. 5
