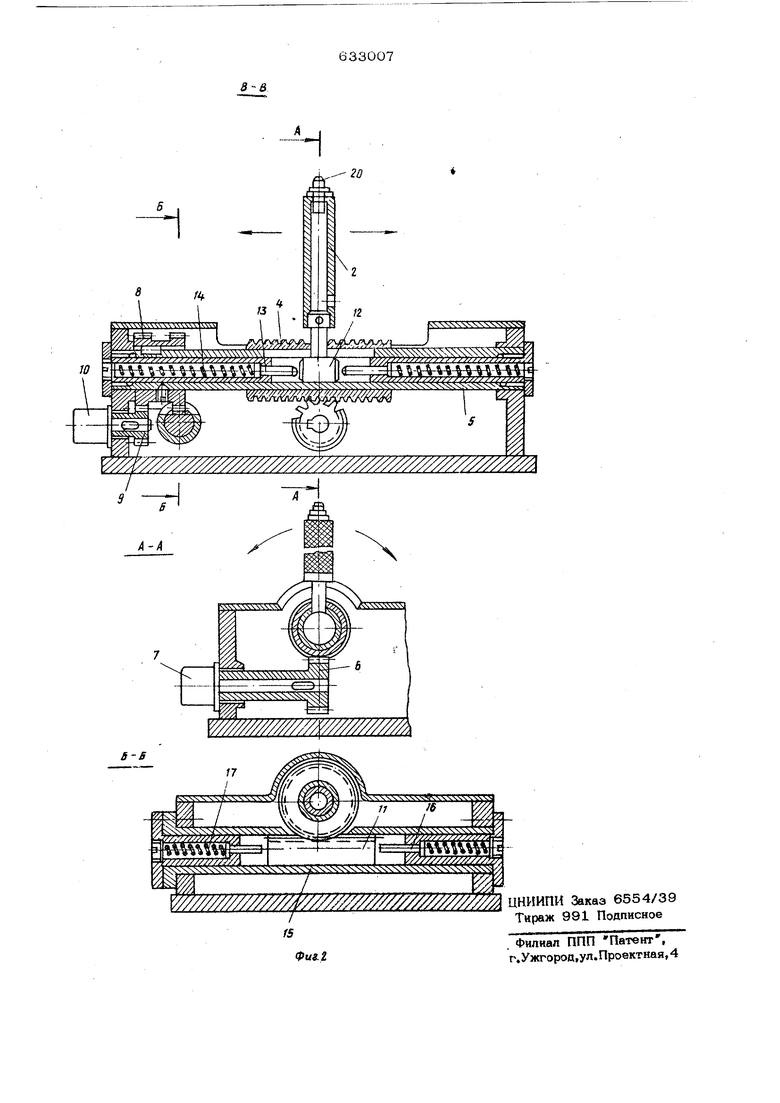
И&обретение относится к области автоматики и предназначено для использования в системах программного управления технологическими процессами с применением промышленных роботов. Известное устройство для задания прог рамм ij требует записи большого числа точек, лежащих на непрерывной траектории движения, при необходимости повторения этой последней, и, при прерывистом движении робота в процессе программиро- ванвя с остановкой в каждой точке, -у оператора отсутствует возможность контроля качества (например, при нанесении покрытий), что сужает область применения уст- ройства. Наиболее близким к данному изобретейшо техническим решением является пере- кгаочатель, описанный в 2, содержащий залаюшую рукоятку, хвостовик которой раоположен в полости дюгандрической напрев- ляющей, и первый координатный преобразЬватель, например потенциометр, который, при наличии одной задающей рукоятки, ocyiшествляет лишь однокоординатный ввод иэ формации, что также cyataeT область еп применения. Основным отличием описываемого пе- клюгштеля являетсято, что в нем на щшиндрнческой направляющей кондентри по установлена зубчатая рейка, кин|емати чески связанная с валом первого коордв натного преобразователя, и второй координатный преобразователь, кинематически связанный с цил1Шдрической направляющей,. Дополнительным отличием данного устрой ства является то, что в нем установлены две пары подпружиненных упоров и кинематически связанная с вторым координатным преобразователем дополнительная зуб чатая рейка, причем одна пара подпру湫 ненных упоров установлена в полости дв лмндрической направляющей по обе сторо« вы хвостовика задающей рукоятки, а дру гая пара - на корпусе переключателя по обе стороны и соосно с дополнительной зубчатой рейкой, Зто позволяет расшщзить область юфн мененяя переключателя. На фиг. 1 показана конструктивная схема переключателя; на фиг, 2 - разрезы по А-А, &-Б и EUB. Пульт pyHiioro управления 1 содержит два устройства для задания программ с задающими рукоятками 2 и 3, Рукоятка установлена на зубчатой рейке 4 следующим образом: хвостовик рукоятки 2 входит в отверстие в рейке 4 и проходит через продольный паз, предусмотренный в цилиндрической направляющей (валу) 5, на которой подвижно установлена зубчатая рейка 4, Рейка входит в зацепление с шестерней 6, закрепленной на оси первого координатного преобразователя (по- тейциометра). 7. На направляющей 5 закреплен блок шестерен 8, один венец которого входит в зацепление с шестерней 9,установле 1ной на оси второго координатного преобразователя (потенциометра) 10,и второй венец гюцешшется с дополнительной зубчатой рейкой 11, На хвостовике рукоятки 2 имеется ползущка 12, подвижно установленная внутри направлян юшей 5, В ползушку 12с двух сторон упираются утшры 13, на которые воздействуют пружины 14, Рейка 11 установле на в нолой направляющей 15 и в ее торцы с двух сторон упираются упоры 16, на которые воздействуют пружш1Ы 17, Та ким образом, рукоотка 2 кинематически связана с осями потенциометров 7 и 10, может перемещаться вдоль вала 5 и поворачиваться вокруг его оси, и пружш1ы 14 и 17 постоянно стремятся удерживат ее в нейтральном (нулевом) положении, Точно таким же образом рукоятка 3 установлена на такой же рейке круглого се чения и кинематически связана с осями потенциометров 18 и 19, В верхней части рукояток 2 и 3 установлены кнопки подачи технолошческих команд 2О и 21, На внещней стороне пульта установле на панель 22, на которой смонтированы тумблеры управления вспомогательными движениями 23, 24, 25, тумблер записи программы 26, переключатели выбора ско ростей для движений, выполненных с постоянной скоростью в процессе программ рования, 27, 28,, Переключатель работает следующим образом: при необходимости задания программ методом обучения оператор берет по рукоятке 2 и 3 в каждую руку Каждой руко- яткой управляется два основных движения т, е, движен1Ш, определяющие заданную траекторию и заданное положение технолс гического оборудования, например распыительного пистолета, относительно поверхости изделия. Если таких движений более четырех, то для облегчения работы оператора некоторые из этих движений включаются предварительно с помощью, переключателей выбора скоростей 27 и 28 и осуществляются в процессе программирования с постоянной предварительно выбранной скоростью. Обычно в качестве таких движений выбираются прямолинейные перемещения, например перемещение вдоль крупногабаритного изделия. При перемещении оператором рукоятки 2 вперед или назад перемещается рейка 4, которая поворачивает щестерню 6 и валик потенциометра 7. При этом сжимается одна из пружин 14, Одновременно с продольным перемещением оператор может отклонять рукоятку 2 вправо или влево, вращая с помощью блока щестерен 8 и щестерни 9 валик потенциометра 10, При этом в зависимости от направления вращения сжимается соответствующая пружина 17, С помощью рукоятки 3 таким же образом приводяггся во вращение валики потенциометров 18 и 19, При повороте валика потенциометра задается скорость движ&ния по соответствующему направлению, зависящая от угла поворота валика и направления движения в зависимости от направления поворота, валика потенциометра. Напряжения с потенциометров 7, 10, 18, 19, определяющие скорости движения- по каждому направлению, а также все сигналы от кнопок и тумблеров управления поступают на вход системы программного управления, где они преобразуются в сиг налЫ) управляющие исполнительными приводами, и одновременно фиксируются в запоминающем устройстве системы. Если оператор отпускает рукоятки, то они под действием пружин 14 и 17 возвращаются в исходное положение и поворачивают валики потенциометров в положение, соответствующее нулевой скорости по каждой из . четырех координат. Вспомогательные движения, которые обычно осуществляются от упора до упора, включаются и выключаются с помощью тумблеров на панели 22, Г1ри программировании сложных процессов оператор отрабатывает процесс с помощью пульта ручного управления, не включая тумблера записи программы,т,е, не фиксируя управляющие сигналы в памяти системы управления. После приобретения соответствующих навыков оператор производит запись программы, включив
тумблер записи. Этим обеспечивается залшг.ъ наиболее качественного процесса, формула изобретения
1.Переключатель, содержащий задающую рукоятку, хвостовик которой располо- жен в полости цилиндрической направляющей, и первый координатный пр бразова тель, например потенциометр, отличающийся тем, что, с целью рас ширения области применения переключателя, в нем на цилиндрической направляющей концентрично установлена зубчатая цилиндрическая рейка, кинематически связанная о валом первого координатного преобразователя, и второй координатный преобразователь, кинематически связанный
с цилиндрической направляющей,
2.Переключатель по п, 1, о т л и ч аю щ и и с я тем, что в нем установле-
, ны две пары подпружиненных упоров и ки-: нематически связанные с вторым координатным преобразователем дополнительную зубчатую рейку, причем одна пара подпружиненных упоров установлена в полости цилиндрической направляющей по обе стороны хвостовика задающей рукоятки, а другая пара - на корпусе перекл«6чателя по обе стороны и соосно с дополнительной зубчатой рейкой.
Источники информации, принятые во внимание при экспертизе:
1,Авторское свидетельство СССР
№ 387800, кл. В 23 К 9/10, 21, O6.7t.
2.Автомобиль Москвич-412 под ред, проф. А. А. Андронова, Машиностроение, М., 1973, с. 2О2-211.


| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Станок для раскладки проводов в жгуты | 1984 |
|
SU1275553A1 |
| ГРЯДОДЕЛАТЕЛЬНЫЙ АГРЕГАТ И.Г.МУХИНА | 1998 |
|
RU2144750C1 |
| Устройство для газопламенной закалки кулачков | 1986 |
|
SU1407966A1 |
| Устройство управления и регулирования гидродвигателями | 1976 |
|
SU767408A1 |
| Регистрирующее устройство | 1978 |
|
SU744233A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2007 |
|
RU2354603C1 |
| Устройство управления манипулятором | 1985 |
|
SU1355475A1 |
| Сканирующее устройство | 1988 |
|
SU1702299A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ СТУДИЙ ТЕЛЕЦЕНТРОВ И ТЕАТРАЛЬНЫХ СЦЕН | 1965 |
|
SU174684A1 |