Изобретение относится к роботостроению, в частности к устройствам управления манипуляторами с плавным регулированием перемещения, где работа оператора требует совмещения движений двух приводов сбалансированного манипулятора.
Цель изобретения - расширение диапазона режимов управления с помощью плоско- контактной связи задающего механизма с чувствительными элементами.
На чертеже представлена кинематическая схема предлагаемого устройства.
Устройство управления манипулятором содержит корпус 1, чувствительные элементы 2-5 и задающий координатный механизм, состоящий из полого вала 6, тяги 7, вала 8, рукоятки 9, пружин 10 и 11, круго- вой рейки 12, шестерни 13 и валика 14, жестко связанного с рукояткой 9. Последняя выполнена полой и установлена на валу 6 с возможностью поворота вокруг своей оси, а также вокруг оси вала 6. Контактные планки 15 и 16 закреплены на валу 6 задающего механизма и размещены вдоль и симметрично его оси. Подпружиненные пружинами 17 и 18 пальца 19 и 20 размещены в цилиндрических направляющих 21 и 22, закрепленных в корпусе 1 в плоскости оси вала 6, с возможностью взаимодействия их подпятников 23 и 24 с контактными планками 15 и 16. Чувствительные элементы 2 и 3 соединены с координатным механизмом посредством тяги 7, расположенной в направляющей 25 и жестко соединенной с валом 8. Последний расположен вдоль оси полого вала 6 и жестко соединен с круговой рейкой 12.
Чувствительные элементы 2 и 3 выполнены в виде пневмопреобразователей клапанного типа, а чувствительные элементы 4 и 5 - в виде пневмопреобразователей типа камер переменного объема с мембранным разделителем.
Устройство управления манипулятором работает следующим образом.
Поворачивая рукоятку 9 вокруг своей оси, шестерня 13 через валик 14 поворачивается и перемещает круговую рейку 12 с валом 8, сжимая при этом пружину 10(11). Вместе с валом 8 по направляющей 25 перемещается тяга 7, воздействуя при этом на чувствительный элемент 2(3), на выходе которого формируется аналоговый сигнал, пропорциональный углу поворота рукоятки 9 вокруг своей оси. Отпустив рукоятку 8, она возвращается в исходное состояние при помощи пружины 10(11).
Редактор М. Петроза Заказ 5465/17
Составитель Е. Ермолаев
Техред И. ВересКорректор М- Шароши
Тираж 952Подписное
ВНИИПИ Государственного ко.митета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0
0
5
5
При отклонении рукоятки 9, например вверх, т.е. при повороте ее вокруг оси полого вала 6, вместе с рукояткой 9 поворачивается валик 14 с шестерней 13, которая, скользя по круговой рейке 12, остается с ней в зацеплении. Полый вал 6 поворачивается и планка 15, воздействуя на подпятник 23, перемещает палец 19. Планка 16 в это время отклоняется от подпятника 24 в противоположную сторону, а опорой для него служит наружная цилиндрическая поверхность вала 6.
Таким образом, палец 20 остается на месте, а палец 19, перемещаясь сжимает пружину 17 и воздействует на чувствительный элемент 4, на выходе которого формируется аналоговый сигнал, величина которого зависит от изменения объема камеры пневмопреобразователя, т.е. от смещения пальца 19 и изменения эффективной площади мембранного разделителя. Закон изменения смещения пальца 19 определяется конструктивными параметрами плоскоконтактной связи задающего механизма и зависит от угла отклонения рукоятки 9 от нейтрального положения.
При помощи пружины 17 рукоятка 9 возвращается в исходное состояние.
При отклонении рукоятки 9 вниз планка 16 контактирует с подпятником 24 и перемещает палец 20, воздействуя на чувствительный элемент 5.
Предлагаемое устройство расширяет диапазон режимов управления манипулятором. Формула изобретения
1.Устройство управления манипулятором, содержащее корпус, задающий координатный механизм с рукояткой, выход- HEjie тяга и вал которого кинематически связаны с чувствительными элементами, отличающееся тем, что, с целью расширения диапазона режимов управления, оно снабжено подпружиненными пальцами с подпятниками и контактными планками, закреп0 ленными на валу задающего механизма и размеи-1енными вдоль и симметрично его оси, а подпружиненные пальцы размещены в корпусе в плоскости оси вала задающего механизма с возможностью взаимодействия их подпятников с контактными планками.
2.Устройство по п. 1 отличающееся тем, что чувствительные элементы выполнены в виде пневмопреобразователей клапанного типа, подвижные элементы которых связаны с тягой, и типа камер переменного объема, мембранные разделители которых связаны с подпружиненными пальцами.
0
5
5
0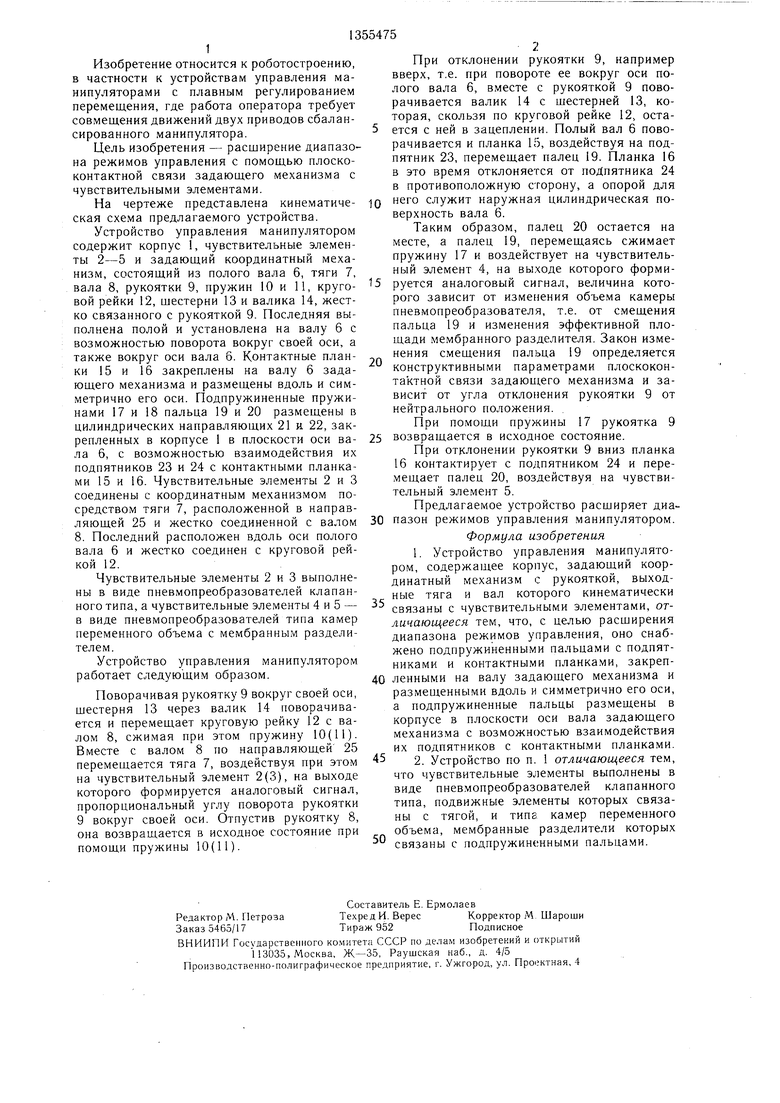
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Консольно-поворотный кран | 1985 |
|
SU1403549A1 |
| Захват манипулятора | 1989 |
|
SU1821357A1 |
| Командоаппарат | 1984 |
|
SU1188798A1 |
| Рубильник-предохранитель | 1972 |
|
SU476616A1 |
| Устройство для сборки плоских пружинных контактов в гнезда колодки соединителя | 1983 |
|
SU1112457A1 |
| Ламельный основонаблюдатель к ткацким станкам | 1959 |
|
SU127200A1 |
| Контактное устройство | 1989 |
|
SU1762427A1 |
Изобретение относится к роботостроению, в частности к устройствам управления манипуляторами с плавным регулированием скорости перемещения, и может применяться для управления двумя приводами сбалансированных манипуляторов. Цель изобретения - расширение диапазона режимов управления манипулятора. Устройство содержит корпус 1, задаюш,ий координатный механизм с рукояткой управления 9 и чувствительные элементы 2, 3, 4, 5. Чувствительные элементы 4 и 5 в виде пневмо- преобразователей типа камер переменного объема связаны с задаюш,им координатным механизмом через подпружиненные пальцы 19, 20 с подпятниками 23, 24 и контактные планки 15, 16, которые закреплены на валу 6 задаюшего механизма и размещены вдоль и симметрично его оси. Подпружиненные пальцы 19, 20 размещены в корпусе 1 в плоскости оси вала 6 с возможностью взаимодействия их подпятников 23, 24 с контактными планками 15, 16. Чувствительные элементы 2, 3 в виде пневмопреоб- разователей клапанного типа связаны с задающим координатным механизмом через тягу 7. 1 з.п. ф-лы, 1 ил. (Л оо ел СЛ СЛ
| Рукоятка управления манипулятором | 1981 |
|
SU996039A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
