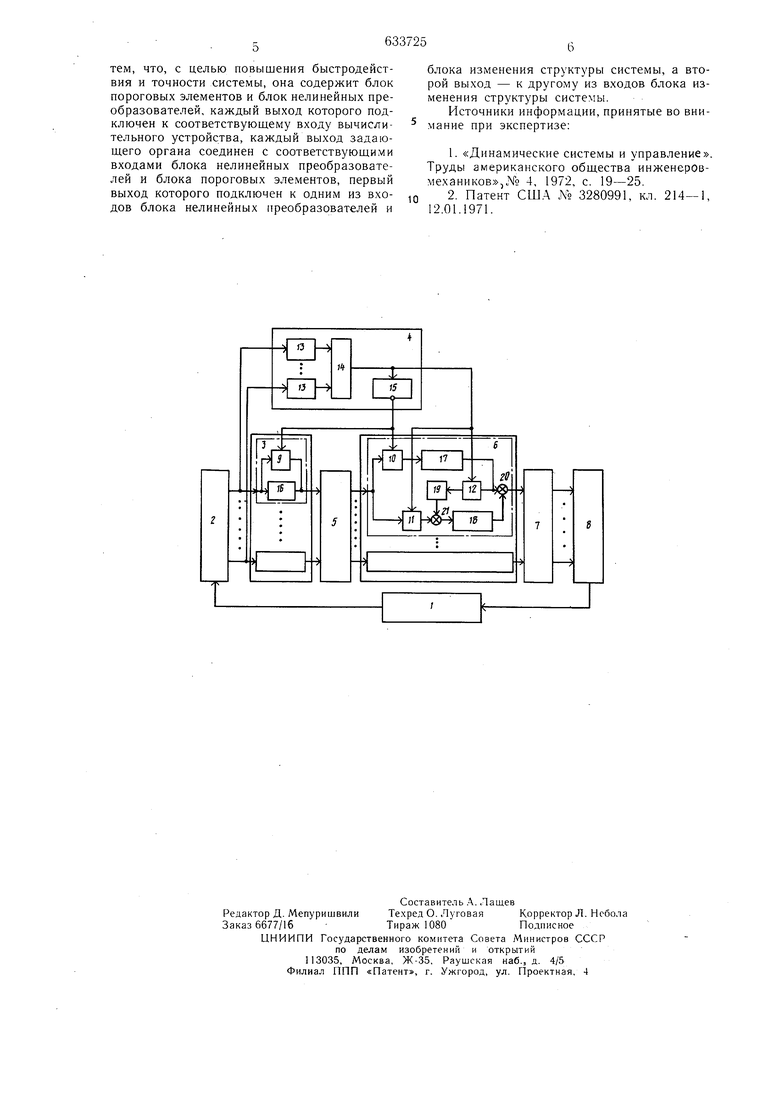
блок 7 силовых следящих приводов; исполнительный механизм 8; коммутирующие ключи 9-12; реле 13 с гестерезисом; логический элемент 14 ИЛИ; логический элемент 15 НЕ; зона нечувствительности 16; апериодическое звено 17; интегратор 18; блок 19 постоянного коэффициента усиления а ; сумматоры 20, 21. Система управления дистанционным манипулятором работает следующим образом. Человек-оператор 1 формирует совокупность командных сигналов Xi ( i - 1, 2, 3, 4, 5,6), которые подаются в блок пороговых элементов 4 и блок нелинейных преобразователей 3. Блок нелинейных преобразователей 3предназначен для управления коммутирующими ключами 9. Блок пороговых элементов 4состоит из реле с гистерезисом 13, логического элемента ИЛИ 14 и логического элемента НЕ 15. Принцип работы, блока пороговых элементов 4 заключается в следующем. В начальный момент, когда амплитуда командных сигналов (х,) (i 1,2, ...6) не превыщает порога срабатывания реле, т.е. (xj)X; ключи 9 и 10 замкнуты, а ключи 11 и 12 разомкнуты. Это соответствует позиционному режиму работы устройства. Если любой из командных сигналов превыщает уровень срабатывания блока пороговых элементов 4 (Х|) Х,то размыкаются ключи 10 и 9 и замыкаются ключи 11 и 12. Система переключается на скоростной режим работы. Обратный переход с режима управления скоростью на-позиционный режим управления осуществляется только при условии (X;) Xj В этом случае с точностью до X; зона позиционного управления всегда располагается центрально относительно текущего положенин охвата. Нелинейные преобразователи блока 3 предназначены для обеспечения нулевого сигнала на входах вычислительного устройства 5в момент перехода с позиционного на скоростной режим работы. Блок нелинейных преобразователей 3 включает коммутирующие ключи 9 и зону нечувствительности, равную уровню срабатывания соответствующего реле блока пороговых элементов 4 Х/Блок нелинейных преобразователей 3 работает еле дующим образом. При позиционном режиме работы ключ 9 замкнут и командный сигнал Xj непосредственно подается на входы вычислительного устройства 5. При размыкании ключа 9 (режим управления скоростью) на входы вычислительного устройства 5 командный сигнал Xj- подается через зону нечувствительности 16. Таким образом, в момент перехода на скоростной режим входные сигналы вычислительного устройства 5 равны нулю, это исключает переходной процесс в момент переключения. Вычислительное устройство 5 преобрг.зует командные сигналы X в сигналы Sj аждои степени подвижности исполнительного механизма 8: Sj J-4©j} где - индекс звена исполнительного механизма;J{6j} -обратная матрица преобразования;0J - угловые перемещения звеньев исполнительного механизма; Х - выходной сигнал задающего органа манипулятора; Sj - выходной сигнал вычислительного устройства. В пределах малых величин сигналов задающего органа манипулятора, обеспечивающих зону позиционного управления, в вычислительном устройстве 5 используется один и тот же алгоритм преобразования {Oj}, что и для скоростного режима управления. Блок изменения структуры системы 6 предназначен для преобразования сигналов Sj в управляющие сигналы каждого привода 0J (J 1 6). Они включают апериодические звенья 17, интеграторы 18, коммутирующие ключи 10, 11, 12 и сумматоры 20 и 21. Блок изменения структуры системы 6 работает следующим образом. При позиционном режиме ключи 10 замкнуты, а ключи 11 и 12 разомкнуты. Сигналы Sj с некоторой постоянной Cj преобразуются в сигналы управления QJ. При скоростном режиме управления ключ 10 размыкается, а ключи 11 и 12 замыкаются. Сигналы Sj интегрируются и через сумматор 20 подаются на входы приводов. В момент перехода на скоростной режим работы информация о величине углового положения, которое было установлено в результате позиционного управления в предыдущий период времени, переписывается на интегратор через цепь, состоящую из ключа 12, блока 19 постоянного коэффициента усиления dj и сумматора 21. Блок 7 преобразует управляющие сигналы 6j непосредственно в перемещение звеньев исполнительного механизма 8, который воспроизводит движения, задаваемые человеком-оператором. При реализации данного изобретения оказалось возможным снизить утомляемость оператора и повысить точность быстродействия позиционирования манипулятора примерно на 20%, причем предельная точность позиционирования определяется точностью установки рукоятки в требуемое положение. Формула изобретения Система управления дистанционным манипулятором, содержащая задающий орган и последовательно соединенные вычислительное устройство, блок изменения структуры системы, блок силовых следящих приводов и исполнительный механизм, отличающаяся тем, что, с целью повышения быстродействия и точности системы, она содержит блок пороговых элементов и блок нелинейных преобразователей, каждый выход которого подключен к соответствующему входу вычислительного устройства, каждый выход задающего органа соединен с соответствующими входами блока нелинейных преобразователей и блока пороговых элементов, первый выход которого подключен к одним из входов блока нелинейных преобразователей и блока изменения структуры системы, а второй выход - к другому из входов блока изменения структуры системы. Источники информации, принятые во внимание при экспертизе: 1. «Динамические системы и управление. Труды американского общества инженеровмехаников,JVb 4, 1972, с. 19-25. 2. Патент США № 3280991, кл. 214-1, 12.01.1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для позиционно-скоростного управления манипулятором | 1981 |
|
SU991366A1 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| Релейная система управления | 1980 |
|
SU962850A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Копирующий манипулятор | 1983 |
|
SU1093542A2 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для управления манипулятором | 1980 |
|
SU903807A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Релейный регулятор | 1989 |
|
SU1695263A1 |