:О
00
ел
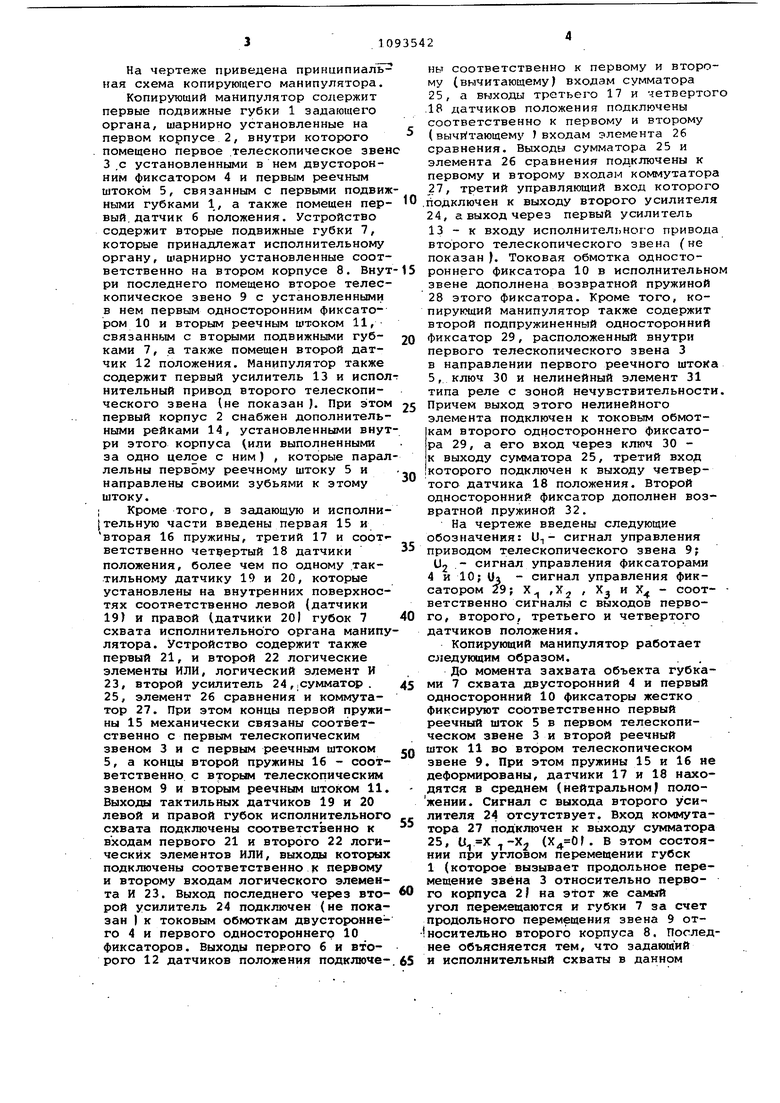
4 rs Изобретение относится к робототехнике и может быть использовано в копирующих дистанционно управляемых манипуляторах. По основному авт.св. № 946918 известен копируквдий манипулятор, содержащий первые подвижные губки схвата задающего органа, шарнирно установленные на первом корпусе, внутри которого помещено первое телескопическое звено с установленными в нем двусторонним фиксатором, например электромагнитным и первым реечным штоком, связанным с первыми подвижными губками, а также первый датчик положения, вторые подвижные губки схвата исполнительного органа шарнирно установленные на втором кЪрпусе, внутри которого помещено втоjpoe телескопическое звено с установлен ными в нем односторонним фиксатором и вторым реечным штоком, связанным с вторыми подвижными губками, второй датчик-положения, первый усилитель и исполнительный привод второго теле скопического звена, причем первый корпус снабжен дополнительными рейка ми, установленными внутри этого корпуса, параллельными первому реечному штоку и направленными своими зубьям к этому штоку, дополнительные первую и вторую пружины, третий и четвертый датчики положений, а также тактильны датчики, которые установлены на вну ренней поверхности губок схвата исполнительного органа, первый и вто рой логические элементы ИЛИ, логичес кий элемент И, второй усилитель, сумматор и элемент сравнения, причем концы первой пружины механически связаны соответственно с первым теле скопическим звеном и с первым реечным штоком, а концы второй пружины соответственно с вторым телескопическим звеном и с вторым реечным штоком, выходы тактильных датчиков левой и правой губок ,схвата исполнительного органа подключены соответственно к входам первого и второго логических элементов ИЛИ, выходы которых подключены соответственно к входам логического элемента И, а выход последнего через второй усилитель подключен к токовым обмоткам первого и второго фиксаторов 13. Недостатком известного манипулятора является то, что он не предназ начен для работы с легко деформируемыми предметами без разрушения. Целью изобретения является расширение функциональных возможностей манипулятора. Цель достигается тем, что копирующий манипулятор, содержащий первые губки схвата задающего органа, шарнирно установленные на первом корпусе, внутри которого помещено первое телескопическое звено с установленными в нем двусторонним фиксатором и первым реечным штоком, связанным с первыми подвижными губками, а также первый датчик положения, вторые подвижные губки схвата исполнительного органа, шарнирно установленные на втором корпусе, внутри которого помещено второе телескопическое звено с установленными в нем односторонним фиксатором и вторь1м реечным штоком, связанным с вторыми подвижными губками, второй датчик положения, первый усилитель и исполнительный привод второго телескопического эвена, причем первый корпус снабжен дополнительными рейками, установленными внутри этого корпуса,, параллельными первому реечному штоку и направленными своими зубьями к этому штоку, дополнительные первую и вторую пружины, третий и четвертый датчики положений, а также тактильные датчики, которые установлены на внутренней поверхности губок схвата исполнительного органа, первый и второй логические элементы ИЛИ, логический элемент И, второй усилитель, сумматор и элемент сравнения, причем концы первой пружины механически связаны соответственно с первым телескопическим звеном и с первым реечным штоком, а концы второй пружины - соответственно с вторым телескопическим звеном и с вторым реечным штоком, выходы тактильных датчиков левой и правой губок схвата исполнительного органа подключены соответственно к входам первого и второго логических элемен:тов ИЛИ, выходы которых подключены соот1ветственно к первому и второму входам логического элемента И, а выход ho следнего через второй усилитель подключен к токовым обмоткам первого и второго фиксаторов, снабжен коммутатором, ключом, дополнительным вторым односторонним фиксатором, установленным в первом телескопическом эвене в направлении первого реечного штока, и нелинейным элементом, причем выход последнего подключен к обмоткам второго фиксатора, а его вход через ключ - к выходу сумматора, ,третий вход которого подключен к iвыходу четвертого датчика положения, выходы первого и второго датчиков положения подключены соответственно к первому и второму входам сумматора, выходы третьего и четвертого датчиков положения - к первому и второму входам элемента сравнения, а выходы сумматора и элемента сравнения к первому и второму входам коммутатора, третий управляющий вход которого подключен к выходу второго усилителя, а выход через первый усилитель - к входу исполнительного привода второго телескопического эвена. На чертеже приведена принципиаль пая схема копирующего манипулятора. Копирующий манипулятор содержит первые подвижные губки 1 задающего органа, шарнирно установленные на первом корпусе 2, внутри которого . помещено первое .телескопическое эве 3 ,с установленными в нем двусторонним фиксатором 4 и первым рюечным штоком 5, связанным с первыми подвиж ными губками 1, а также помещен пер вый, датчик 6 положения. Устройство содержит вторые подвижные губки 7, которые принадлежат исполнительному органу, шарнирно установленные соот ветственно на втором корпусе 8. Внут ри последнего помещено второе телескопическое звено 9 с установленными в нем первым односторонним фиксатором 10 и вторым реечным штоком 11, связанным с втогими подвижными губками 7, а также помещен второй датчик 12 положения. Манипулятор также содержит первый усилитель 13 и испол нительный привод второго телескопического звена (не показан ). При этом первый корпус 2 снабжен дополнительными рейками 14, установленными внут ри этого корпуса (или выполненными за одно целое с ним) , которые парал лельны первому реечному штоку 5 и направлены своими зубьями к этому штоку. Кроме того, в задающую и исполниjтельную части введены первая 15 и вторая 16 пружины, третий 17 и соответственно четвертый 18 датчики положения, более чем по одному тактильному датчику 19 и 20, которые установлены на внутренних поверхностях соответственно левой {датчики 19) и правой (датчики 20I губок 7 схвата исполнительного органа манипу лятора. Устройство содержит также первый 21, и второй 22 логические элементы ИЛИ, логический элемент И 23, второй усилитель 24 , .сумматор . 25, элемент 26 сравнения и коммутатор 27. При этом концы первой пружины 15 механически связаны соответственно с первым телескопическим звеном 3 и с первым реечным штоком 5, а концы второй пружины 16 - соответственно с вторым телескопическим звеном 9 и вторым реечным штокотл 11. Выходы тактильных датчиков 19 и 20 левой и правой губок исполнительного схвата подключены соответственно к входам первого 21 и второго 22 логических элементов ИЛИ, выходы которых подключены соответственно к первому и второму входам логического элемента И 23. Выход последнего через второй усилитель 24 подключен (не показан I к токовым обмоткам двустороннего 4 и первого одностороннего 10 фиксаторов. Выходы первого 6 и второго 12 датчиков положения подключень соответственно к первому и второму (вычитающему) входам сумматора 25, а выходы третьего 17 и четвертого ,18 датчиков положения подключены соответственно к первому и второму (вычр тающему ) входам элемента 26 сравнения. Выходы сумматора 25 и элемента 26 сравнения подключены к первому и второму входам коммутатора 27, третий управляющий вход которого .подключен к выходу второго усилителя 24,а выход через первый усилитель 13 - к входу исполнительного привода второго телескопического звенп (не показан ). Токовая обмотка одностороннего фиксатора 10 в исполнительном звене дополнена возвратной пружиной 28 этого фиксатора. Кроме того, копирук ций манипулятор также содержит второй подпружиненный односторонний фиксатор 29, расположенный внутри первого телескопического звена 3 в направлении первого реечного штока 5, ключ 30 и нелинейный элемент 31 типа реле с зоной нечувствительности. Причем выход этого нелинейного элемента подключен к токовым обмоткам второго одностороннего фиксатора 29, а его вход через ключ 30 к выходу сумматора 25, третий вход которого подключен к выходу четвертого датчика 18 положения. Второй односторонний фиксатор дополнен возвратной пружиной 32. На чертеже введены следующие обозначения: сигнал управления приводом телескопического звена 9; U2 .- сигнал управления фиксаторами 4 и 10; Ui - сигнал управления фиксатором 29; Х ,Х2 , Х и Х - соот- ветственно сигналы с выходов первого, второго, третьего и четвертого датчиков положения. Копирующий манипулятор работает следующим образом. До момента захвата объекта губками 7 схвата двусторонний 4 и первый односторонний 10 фиксаторы жестко фиксируют соответственно первый реечный шток 5 в первом телескопическом звене 3 и второй реечный шток 11 во втором телескопическом звене 9. При этом пружины 15 и 16 не деформированы, датчики 17 и 18 находятся в среднем (нейтральном| положении. Сигнсш с выхода второго Усилителя 24 отсутствует. Вход коммутатора 27 подключен к выходу сумматора 25,Ц Х т-Xj ( этом состоянии при угловом перемещении губок 1 (которое вызывает продольное перемещение звена 3 относительно первого корпуса 2I на этот же самый угол перемещаются и губки 7 за счет продольного перемещения звена 9 относительно второго корпуса 8. Последнее объясняется тем, что задающий и исполнительный схваты в данном случае работают в следящем режиме, так как исполнительный привод второ го телескопического эвена отрабатывает ошибку (разность двух сигналов . X -Х2 ), формирующуюся на выходе первого сумматора 25. При касании обеими губками 7 исполнительного схвата схватываемого предмета, т.е. при срабатывании хотя бы по одному тактильному д тчи|ку 19 и 20 левой и правой групп, на вход второго усилителя 24 поступит сигнал, который, усилившись, переключит фиксатор 4 в другое положение (произойдет сцепление фиксатора 4 с дополнительными рейками 14/, . выведет односторонний фиксатор 10 из зацепления с вторым реечным штоком 11 и обеспечит переключение входа коммутатора 27 к выходу второго сумматора 25. В резуль.тате реечные штоки 5 и 11 получат возможность перемещаться соответственно в первом 3 и втором 9 телескопических звеньях а -Хд . После касания предмета губками 7 величина сигнала Х останется неизменной и дальнейшее сжатие губок 1 происходит с усилием, пропор циональным величине деформации пружины 15, т.е. пропорционально величине линейного перемещения штока 5 относительно звена 3 (звено 3 неподвижно относительно корпуса 2) . Величину этого линейного перемещения измеряет третий датчик 17, выходной аигнал которого X, сравнивается с выходным сигналом четвертого датчика положения Х4 . Возникающая на выходе элемента 26 сравнения .ошибка отрабатывается исполнительным пр иводом второго телескопического звена 9 за счет перемещения этого .относительно корпуса 8.При несжимаемом перемещение звена 9 произойдет в том же направлении и на ту же величину, что и перемещение штока 5 относительно звена 3 (шток 11 неподвижен относительно корпуса 8). После отключения фиксатора 10 у штойа 11 появляется возможность продольного перемещения относительно звена 9, то при перемещении вверх звена 9 и неподвижных губок 7 про- изойдет деформация (растяжение пру |жины 16 с усилием, пропорциональным |усилию сжатия пружины 15. В-результ те схватываемый предмет в исполни тельном схвате сжат с усилием, точно соответствующим усилию, развиваемому в задающем схвате. При этом Xj и Х равны между собо и равны приращению Xj , возникающему после захвата и сжатия объекта с некоторым усилием. Если же схватываемый предмет под действием развиваемого усилия поддается деформаций, т.е. губки 7 несколько сжимаются по сравнению с исходным состоянием при касании объекта, то для сохранений величины сжатия предмета неизменной величина приращения Х должна быть больше величины Х и Х . Поскольку в данном случае на вход первого усилителя 13 поступает сигнал с элемента 26 сравнения, то перемещение звена 9 происходит до тех пор, пока величины Xj и Х4 не сравняются, а именно они определяют соответствующее удлинение и сжатие пружин 16 и 17 независимо от текущего углового положения губок 1 и 7. В результате усилие сжатия объекта при Хд Хд точно определяется усилием, прикладываем к задающему схвату, независимо от формы объекта. После разжатия предмета через .некоторое время, необходимое для приведения пружин 15 и 16, а также датчиков 17 и 18 в нейтральное положение (это время задается линией задержки до или после второго усилителя 24) , происходит переключение фиксаторов 4 и 10 в положение на :шток, в те же зубья реек, что и до |взятйя предмета, а коммутатор 27 ПОДКЛЮЧИТСЯ к выходу сумматора 25 ( f. В результате полностью восстановится однотипность (синхрон- ность I кинематических параметров между задающей и исполнительной сторонами схвата. После этого губки 1 и 7 сжимаются и разжимаются в следящем режиме до тех пор, пока не произойдет касание датчиков 19 и 20 исполнительного схвата с новым предметом. При работе с несжимаекими объекталш после их касания схватом величина приращения сигнала Х. , т.е. величина Х Х , равна величине сигнала К- . Ъ резульjrate на выходе сумматора 25 нулевой сигнал (Х 2 -Х,|+ Хф 0. Если объект под действием приложенного усилия начинает сжиматься, то шток 11 перемещается вверх относительно неподвижного корпуса 8 и в результате величина (Xj Xj,) становится О, а на выходе сумматора 25 соответст венно Х|-|-Х -Х2 0. Если величина сигнала (Х| +Ху-Хд) превышает зону нечувствительности нелинейного элемента 31, которая определяется допустимой упругой деформацией объекта, то на выходе нелинейного элемента 31 появляется сигнал, который включает второй односторонний фиксатор 29. Врезультате первый реечный шток 5 жестко фиксируется в первом телескопическом звене 3. Таким образом, дальнейшее сжатие губок 1 прекращается, а усилие на губках 7 исполни


| название | год | авторы | номер документа |
|---|---|---|---|
| Копирующий манипулятор | 1980 |
|
SU946918A1 |
| Устройство для управления схватом манипулятора | 1980 |
|
SU949628A1 |
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Схват манипулятора | 1978 |
|
SU703323A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Устройство управления усилием схвата манипулятора | 1985 |
|
SU1266733A1 |
| Устройство для управления схватом манипулятора | 1989 |
|
SU1754439A1 |
| Устройство для управления схватом манипулятора | 1978 |
|
SU785842A1 |
| Устройство для управления схватом робота | 1981 |
|
SU1115014A1 |
КОПИРУЮЩИЙ МАНИПУЛЯТОР ПО авт.св. 946918, отличаю-щ и и с я тем, что, с целью расширения функциональных возможностей, он снабжен коммутатором, ключом, дополнительным вторым односторонним фиксатором, установленным в первом телескопическом звене в направлении первого реечного штока, и нелинейным элементом, причем выход последнего подключен к обмоткам второго фиксатора, а его вход через ключ - к выходу сумматора, третий вход которого подключен к выходу четвертого датчика положения, выходы первого и второго датчиков положения подключены соответственно к первому и второму входам сумматора, выходы третьего и четвертого датчиков положения- к первому и второму входам элемента сравнения, а выходы сумматора и элемента сравнения - к первому и второму входам коммутатора, третий управляющий вход которого подключен к выходу второго усилителя, а выход j через первый усилитель - к входу исполнительного привода второго телескопического звена.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
