Изобретение относится к робототехнике и может быть использовано при создании дистанционных манипуляторов.
Цель изобретения - повышение точности устройства за счет исключения влияния постоянных времени апериодических блоков.
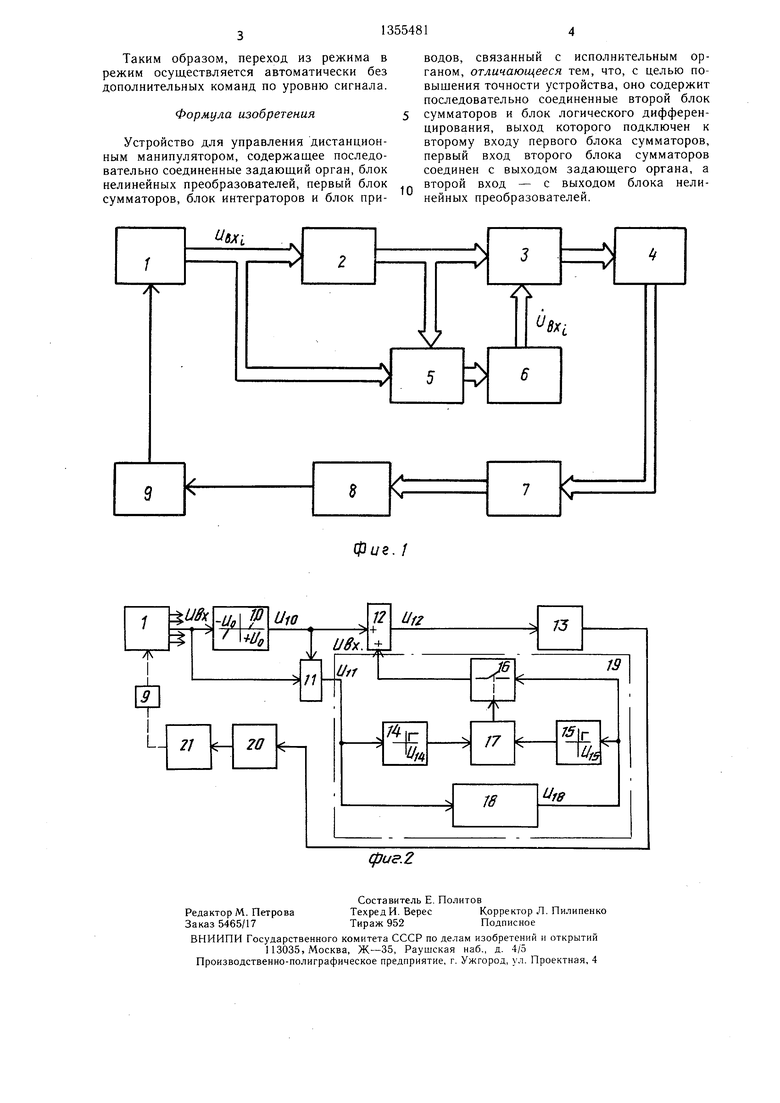
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - функциональная схема одной регулируемой координаты.
Схема устройства на фиг. 1 содержит задающий орган 1, блок 2 нелинейных преобразователей, первый блок 3 сумматора, блок 4 интеграторов, второй блок 5 сумматоров, блок 6 дифференцирования, блок 7 приводов, исполнительный орган 8 и оператор 9.
Схема на фиг. 2 содержит нелинейный преобразователь (блок) 10, первый и второй сумматоры 11 и 12 соответственно, интегратор 13, первый и второй пороговые элементы 14 и 15 соответственно, ключ 16, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 17, дифференциатор 18, элемент 19 логического дифференцирования, привод 20, сустав 21 исполнительного органа и выходные сигналы соответствующих блоков.
Устройство работает следующим образом.
Устройство может работать в двух режимах: псевдопозиционном, представляющем собой комбинацию двух режимов - позиционного и останов, и скоростном. Режим работы определяется величиной сигнала UBX,-, а в псевдопозиционном режиме еще и знаком сигнала Овх ,-, задаваемого оператором 9 с помощью рукоятки задающего органа 1. Переход с одного режима на другой производится автоматически индивидуально для каждого сустава исполнительного органа 8. В псевдопозиционном режиме сигналы UBX ; с задающей рукоятки (в этом режиме величины сигналов Uj,, находятся в пределах соответствующей зоны нечувствительности ±Uo блока 2 нелинейных преобразователей) подаются через второй блок 5 сумматоров в блок 6 логического диффе- р енцирования. Если знаки сигналов UBX,- и йвх; в блоке 6 совпадают, то сигналы Овх ,- подаются через блок 4 интеграторов на блок 7 приводов, которые вызывают перемещение суставов исполнительного органа 8 на углы, пропорциональные величине отклонения задающего органа 1, Если знаки Овх , в блоке 6 противоположны знакам UBX ,, то на выходах блока 6 сигналы равны нулю, а в блок 7 приводов поступают сигналы с блока 4 интеграторов, записанные там на последний момент времени, т.е. суставы исполнительного органа 8 находятся в неподвижном положении с координатами, соответствующими сигналам с блока 4.
В скоростном режиме сигналы UBX , с задающего органа 1 (в этом режиме величины сигналов UBX ; находятся за пределами зоны нечувствительности i Uo) подаются через первый блок 3 сумматоров на блок 4 интеграторов, а с его выхода пропорциональные скоростному перемещению суставов исполнительного органа 8 подаются в
блок 7.
Более подробно работа устройства поясняется функциональной схемой управления одним суставом исполнительного органа 8 {фиг. 2).
Оператор 9, воздействует (отклоняет, например, вправо) на задающий орган, сигнал UBX, пропорциональный этому воздействию, подается на блок 10 и на первый вход сум.матора 12.
Если Uo, то устройство рабо5 тает в псевдопозиционном режиме
UM U.,O, где и 10 О, таким образом, Uii UBX.
Сигнал Uii подается на вход порогового элемента 14 и на вход дифференциа0 тора 18, Блок 14 срабатывает и выдает на первый вход элемента 17 сигнал, равный логической единице. С блока 18 продифференцированный сигнал Uii подается на вход элемента 15 и на информационный вход
5 ключа 16. Блок 15 срабатывает, так как знак сигнала Uig совпадает со знаком сигнала Uii (оператор не менял направление воздействия на задающий орган 1) и на втором входе элемента 17 появляется сигнал, равный логической единице. Таким образом,
0 на выходе элемента 17 появляется сигнал, равный логической единице, ключ 16 срабатывает и сигнал Ui8 Овх через ключ 16 подается на второй вх()д сумматора 11
Ul2 UlO+ Овх
Сигнал интегрируется в блоке 13 и пода- 5 ется на привод 20, который перемещает сустав 21 на угол, пропорциональный величине отклонения задающего органа 1. Это позиционный режим управления.
Если оператор 9 поменял отклонение органа 1, то сигнал Uis становится другого знака, следовательно, на втором входе элемента 17 появляется сигнал логического нуля, ключ 16 разомкнется. На интеграторе 13 запоминается последний на данный момент времени сигнал Овх, сустав 21 ис- 5 полнительного органа остается в неподвижном состоянии до тех пор, пока орган не возвратится в нулевое (начальное) положение и оператором 9 не произведет ее отклонение снова вправо или влево. Это режим останова.
0 В скоростном режиме , сигнал Ui2 Uio+ й„,
где 0 О, так как Uii UBX-Uio ; Uii 0; так как UBX Uio.
Сигнал и 12 интегрируется в блоке 13. 5 Таким образом, сигнал Овх от воздействия оператора 9 на задающий орган 1 пропорционален скорости перемещения сустава 21 исполнительного органа.
0
Таким образом, переход из режима в режим осуществляется автоматически без дополнительных команд по уровню сигнала.
Формула изобретения
Устройство для управления дистанционным манипулятором, содержащее последовательно соединенные задающий орган, блок нелинейных преобразователей, первый блок сумматоров, блок интеграторов и блок приСоставитель Е. Политое
Редактор М. ПетроваТехред И. ВересКорректор Л. Пилипенко
Заказ 5465/17Тираж 952Подписное
ВНИИПИ Государственного комитета СССР по де.1ам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
водов, связанный с исполнительным органом, отличающееся тем, что, с целью по- выщения точности устройства, оно содержит последовательно соединенные второй блок сумматоров и блок логического дифференцирования, выход которого подключен к второму входу первого блока сумматоров, первый вход второго блока сумматоров соединен с выходом задающего органа, а второй вход - с выходом блока нелинейных преобразователей.
Фие. 1
фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| Систма управления дистанционным манипулятором | 1976 |
|
SU633725A1 |
| Устройство для управления дистанционным манипулятором | 1984 |
|
SU1168895A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ РОБОТА | 2002 |
|
RU2230349C2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650428A2 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| Задающее устройство системы управления электроприводом | 1986 |
|
SU1381674A1 |
| Многоканальный регулятор | 1989 |
|
SU1608629A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1565679A1 |
Изобретение относится к робототехнике и может быть использовано при создании дистанционных манипуляторов. Целью изобретения является повышение точности за счет исключения влияния постоянных времени апериодических блоков. Для этого в устройство, содержащее последовательно соединенные задающий орган, блоки нелинейных преобразователей, сумматоров, интеграторов, а также блок приводов, связанный с исполнительным органом, дополнительно введены последовательно соединенные второй блок сумматоров и блок логического дифференцирования, выход которого соединен с первым блоком сумматоров, а входы второго блока сумматоров связаны с выходами задающего органа и блока не- лиейных преобразователей. 2 ил. оо ел ел N 00
| Систма управления дистанционным манипулятором | 1976 |
|
SU633725A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
