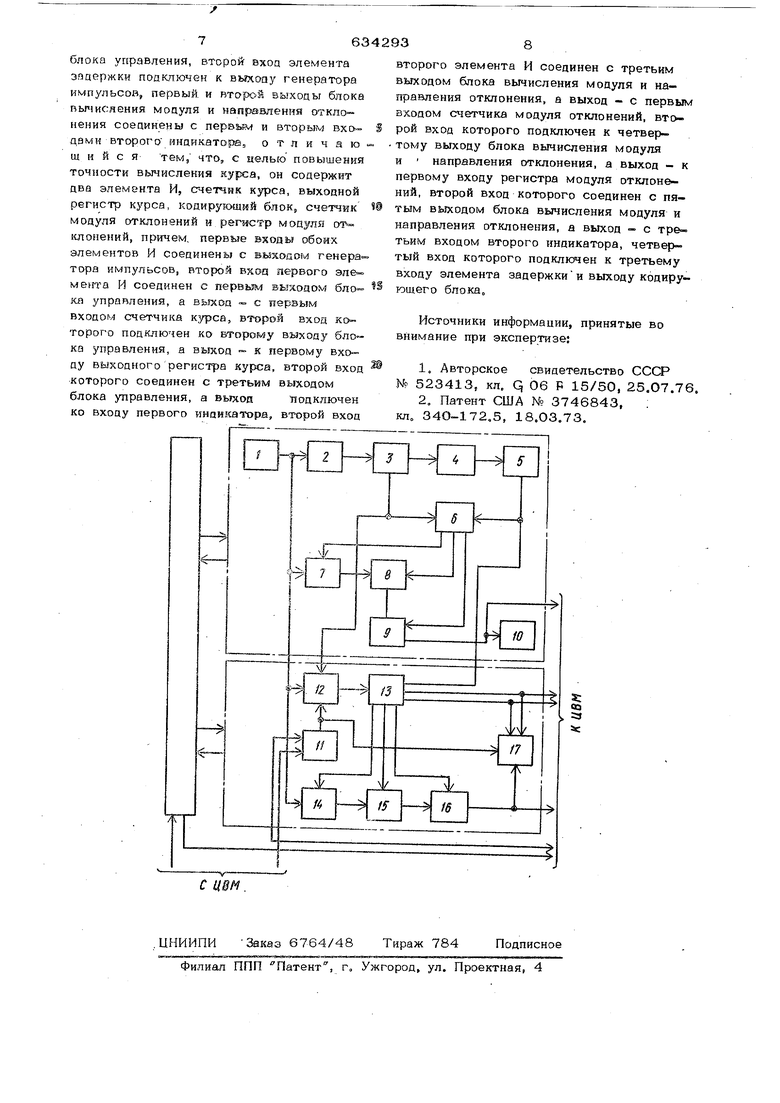
Предлагаемое изобретение относится к области цифровой автоматики и контрол но-измерительной техники и может найти применение в суцовых автоматизированны системах контроля и управления. Известен магнитный компас с дистанционным цифровым отсчетом показаний fi Указанное устройство содержит кодовый диод, который вращается в соответс-р вии с положением компаса и позволяет осуществлять электрооптический съем показаний, вырабатывая электрические выходные сигналы, соответствующие положению компаса, логическая схема обрабатывает полученную в коде Грея информацию и вырабатывает последовательные цифровые импульсы, которые передаются на дистанционные приемные пункты и отображают компасный курс. Указанное устройство позволяет отобразить в цифровом виде показания магнит ного компаса. Наиболее близким по технической сущности к предложенному устройству является ретрансляционное считывающее устройство для гирокомпаса Г21 , содержащее первый индикатор и генератор импульсов, выход которого через делитель соединен с входом первого формирователя, выход которого через датчик реального курса и второй формирователь Соединен с первым входом блока управления и первым входом блока вычисления модуля и направления отклонения, второй вход которого подключен к выходу элемента задержки, первый вход которого соединен со вторым выходом первого формирователя и вторым входом блока управления, второй вход элемента задержки подключен к выходу генератора импульсов, первый н второй выходы блока вычисления модуля и направления отклонения соединены с первым и вторым входами второго индикатора. Известное устройство имеет значительные математические погрешности, не позволяет вычислять и индицировать разность между заданным и реальным курсом к определять направление отклонения курса от заданного. Кроме того, в устройстве не предусмотрен режим контроля всего устройства с частотой контроля, задаваемой с ЦВМ или от внутреннего устройства управления. Цель изобретения - повышение точности вычисления курса путем устранения возможности появления систематической ошибки при вычислении реального курса, получение вычисленного значения модуля и направления отклонения реального курса от заданного и введения предварительного режима контроля устройства. Поставленная цель постигается тем, что в известное устройство введены два элемента И, счетчик курса, выходной регистр курса, кодирующий блок, счетчик модуля отклонений и-регистр модуля отклонений, причем первые входы обоих элементов И соединены с выходом генера тора импульсов, второй вход первого элемента И соединен с первым выходом блока управления, а выход - с первым входом счетчика курса, второй вход которого подключен ко второму выходу блока упра ления, а выход - к первому входу въ ходного регистра курса, второй вход которого соединен с третьим выходом блокя управления, а выход подключен ко вхо ду первого индикатора, второй вход второго элемента И соединен с третьим выходом блока вычисления модуля и направления отклонения, а выход - с первы входом счетчика модуля отклонений, второй вход которого подключен к четвертому выходу блока вычисления модуля и направления отклонения, а выход - к первому входу регистра модуля отклоникий, второй вхоа которого соединен с пятым выходом блока вьнисления модуля и направления отклонения, а выход с третьим дходом второго индикатора, четвертый вход которого подключен к третьему входу элемента задержки и выходу кодирующего блока. На чертеже представлена структурная схема предлагаемого судового цифрового курсоуказателя. В состав его входят; блок вычисления курса, состоящий из кварцевого генератора импульсов 1, яе лителя 2, первого формирователя 3, да-рчика реального курса 4, второго формиро вателя 5, блока управления 6, первого элемента И 7, счетчика курса 8, выходного ре гистра курса 9, первого индикатора 10, ко дирующего блока 11, элемента задержки 1 63 34 лока определения направления и модуля отлонения 13, второго элемента И 14, счетика модуля отклонения 15, регистра модуя отклонения 16, второго индикатора 17. Работа устройства протекает следующим образом. Генератор импульсов 1 генерирует импульсы с выхода делителя 2 сигнал с периодом рабочей частоты датчика курса 4 поступает на формирователь 3, который-, состоит из формирователя коротких импульсов по переднему фронту меандра и фильтра низкой частоты с усилителем и эмиттерным повторителем. Синусоидальный сигнал (опорный сигнал) поступает на датчик курса 4, механически связанный с гирокомпасом или магнитным компасом. На выходе датчика 7 получаем измеряемый синусоидальный сигнал, фаза которого сдвинута по отношению к опорному на величину, пропорциональную реальному курсу судна. Этот сигнал поступает на формирователь 5, на выходе которого получаем короткие импульсы, сформированные по нулям синусоиды. Опорный и измеряемый сигналы поступают на первый и второй входы блока управления 6, в котором сдвиг фаз преобразуется во временной интервал, пропорциональный модулю реального курса, который подается с выхода на первый эле1 ент И 7, где заполняется импульсами Генератора 1. Пачка импульсов, количество которых пропорционально модулю заданного курса, с выхода первого элемента 7 поступает на вход счетчика курса 8, предварительно сброшенного импульсом со второго выхода блока управления 6. Информация из счетчика курса 8 переписывается в выходной регистр курса 9 в моменты поступления импульсов разрешения на занесение с третьего выхода блока управления 6. В устройстве индикации двоично-десятичный код реального курса, поступающий из выходного регистра курса 9, преобразуется дешифратором в семисегментный код цифрового индикатора, на котором загорается .значение реального курса в градусах, включая индикатор шестых долей градуса, Параллельно сформированный измеряемый сигнал с выходного согласующего и формирующего устройства 8 поступает на первый вход блока определения направления и модуля отклонения 13, Заданный курс либо набирается вручную на кодирующем устройстве 11 и код поS6дается на внешний выход к ЦВМ, либо вычисляется в ЦВМ, и подается на вход кодирующего устройства, в состав кото рого входят элементы ИЛИ, с выхода которых код заданного курса поступает на второй индикатор 17 и на вход элемента задержки 12. Элемент задержки , 12 :преобразуетг код заданного курса в периодический сигнал, сдвинутый по отно шению к опорному сигналу, поступающе- му с выхода первого формирователя 3, на временной интервал, численно равный заданному курсу. Элемент задержки 12 состоит из суммирующего счетчика и схемы сравнения кодов, на один из входов которого подается код заданного кур са, на другие - код содержимого счетчика, С приходом опорного импульса счетчик сбрасьгоается в исходное состояние. На счетный вход счетчика поступают им- пульсы с кварцевого генератора импульсов. При равенстве кода в счетчике и ко да заданного курса на выходе схемы сравнения кодов появляется импульс. Таким образом, на выходе элемента задержки 12 получаем последовательност импульсов с периодом, равным опорному, но задержанную относительно него на вре менной интервал, пропорциональный модулю заданного курса. В результате на первый вход блока определения направления и модуля отклонения 13 подаются импульсы с формирователя 5, сдвинутые относительно опорного на временной и тервал, пропорциональный модулю реального курса, а на второй вход - импульсы задержанные относительно опорного на временной интервал, пропорциональный модулю заданного курса. В блок определения направления и мо дуля от)слонения 16 входит устройство выделения временного интервала, пропорционального модулю отклонения реального курса от заданного, определитель направления отклонения, формирователь импульсов сброса, счетчика, модуля откло нения и формирователь импульсов разрешения на занесение в регистр модуля отклонения 16, Временной интервал с по мощью второго элемента И 14 заполняется импульсами кварцевого генератора 1 и пачка импульсов с его выхода поступает на счетный вход, предварительно сброшенного счетчика модуля отклонения 15. С его выхода код, соответствующий измеренному значению модуля отклонения записьшается в моменты поступления импульса разрешения на занесение в регист 3 модуля отклонения 16, с выхода которого информация поступает на блок индикации 17, который состоит из дешифратора двоично-десятичного кода в семисегмент ный код цифрового табло для высвечивания заданного курса и индикатора отклонения. В зависимости от направления отклонения реального курса от заданного на четвертх м или пятом выходе блока определения направления и модуля отклонения 13 появляется сигнал, управляюш ий зажиганием индикатора отклонения, выполненного на дискретно-аналоговой шкале для высвечивания модуля и направления отклонения, причем, нулевому отклонению соответствует свечение в центре шкалы, а отклонение влево или вправо - увеличение численного значения, начиная от середины влево или вправо, с соответствующей направлению цветовой подсветкой, Предусмотрена возможность регулировки интенсивности свечения индикаторов в индикаторах 10 и 17. В предлагаемом судовом цифровом курсоуказатела возможно измерение с заданной точностью реального курса, занесение в выходной регистр с заданной частотой информации о курсе, кроме того, указанное устройство позволяет с заданной точностью вычислять и индицировать разность между заданным и реальным курсом и определять и индицировать направление отклонения курса от заданного, в устройстве предусмотрен режим авто- матического контроля с частотой опроса задаваемой от ЦВМ. Судовой цифровой курсоуказатель позволяет получить технико-экономический эффект за счет повышения точности вы- числения курса корабля. Формула изобретения Судовой цифровой курсоуказатель содержащий первый индикатор и генератор импульсов, выход которого через а&литель соединен, со входом первого формирователя, первый выход которого через датчик реального курса и второй формирователь соединен с первым входом блока управления и первым входом блока вычисления модуля и направления отклонения, второй вход которого подключен к выходу элемента задержки, первый вход которого соединен со вторым выходом первого формирователя и вторым входом 763 блока управления, второй вхоц элемента задержки поак.пючен к выхоау генератора импульсов, первый, и второй выходы блока вычисления модуля и направления отклонения соединены с первь5м и вторым входами второго индикаторе отличаю щийся тем, что, с целью повышения точности вычисления курса, он содержит два элемента И, счетчик курса, выходной регистр курса, кодирующий блок, счетчик модуля отклонений и регистр модуля (шонений, причем, первые входы обоих элементов И соединены с выходом генера- тора импульсов, второй вхоа первого эле« MBtnS И соединен с первым выходом бло- ка управления, а выход - с первым входом счетчика курса, второй вход которого подключен ко второму выхоау бло ка управления, а выход - к первому входу выходного регистра курса, второй вход которого соединен с третьим выходом блока управления, а выход подключен ко входу первого индикатора, второй вход 3 второго элемента И соединен с третьим выходом блока вычисления модуля и направления отклонения, а выход - с первым входом счетчика модуля отклонений, второй вход которого подключен к четвертому выходу блока вычисления модуля и направления отклонения, а выход - к первому входу регистра модуля отклонений, второй вход которого соединен с пятым выходом блока вычисления модуля и направления отклонения, а выход - с третьим входом второго индикатора, четвертый вход которого подключен к третьему входу элемента задержкии выходу кодирующего блока, Источники информации, принятые во внимание при экспертизе; 1.Авторское свидетельство СССР № 523413, кл. q 06 Р 15/50, 25.07.76. 2,Патент США № 3746843, : кл, 34О-172.5, 18.03.73.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления местоположения транспортного средства | 1988 |
|
SU1589292A1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1992 |
|
RU2039935C1 |
| Цифровой компас | 1980 |
|
SU900113A1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| Судовой цифровой аксиометр | 1979 |
|
SU977279A2 |
| Цифровой компас | 1988 |
|
SU1515050A1 |
| Устройство для контроля и регистрации параметров процесса высева | 1988 |
|
SU1737476A1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СТРЕЛКА НА СТЕНДЕ | 1993 |
|
RU2074372C1 |
sc
CQ 3 SS
