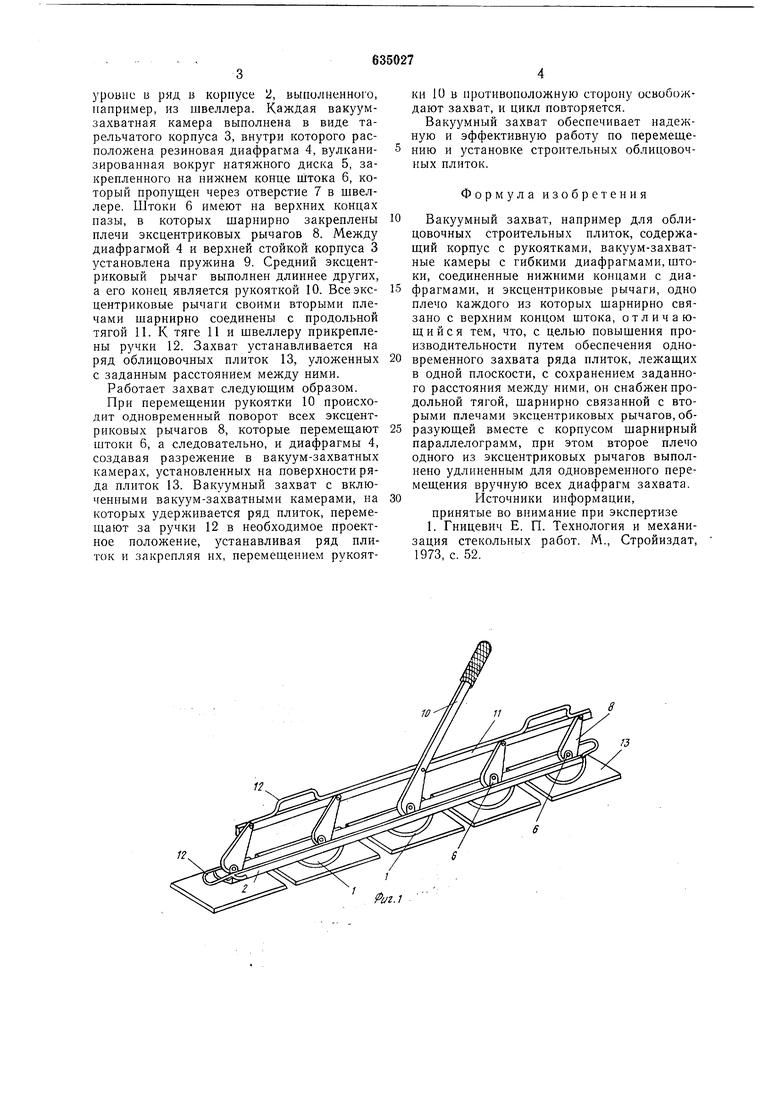
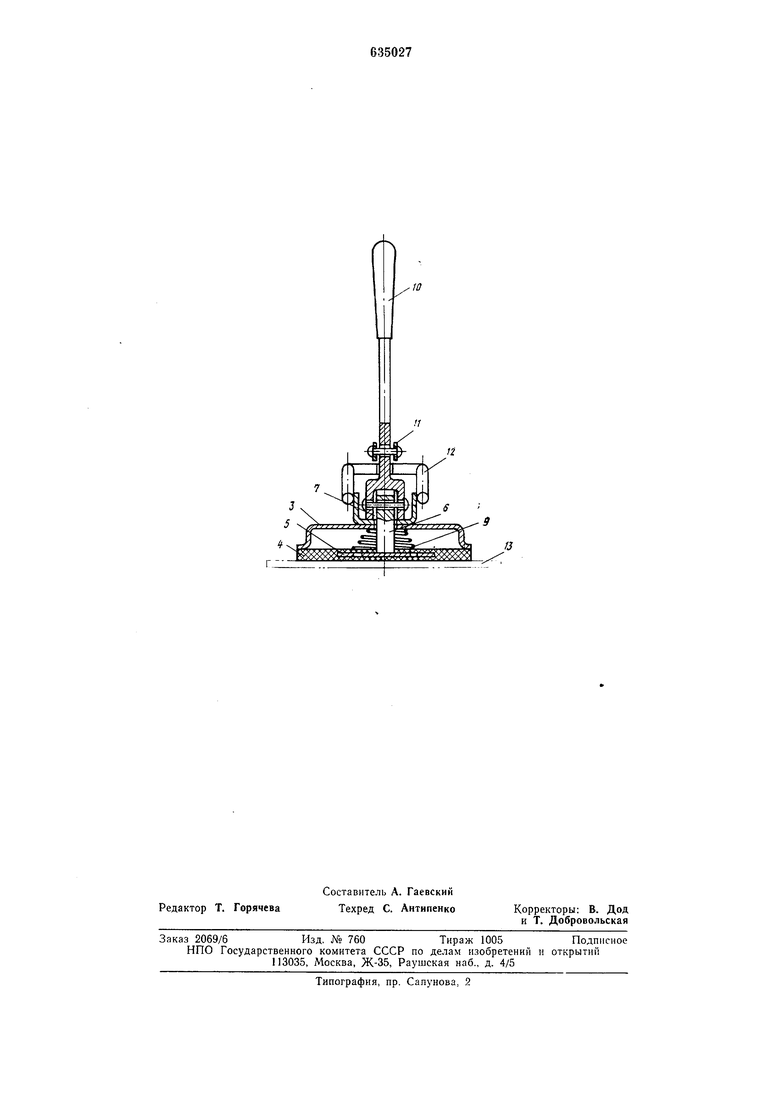
уровне в ряд в корпусе 2, выполненного, например, из швеллера. Каждая вакуумзахватная камера выполнена в внде тарельчатого корпуса 3, внутри которого располол ена резиновая диафрагма 4, вулканизированная вокруг иатял ного диска 5, закрепленного на нижнем конце потока 6, который пропущен через отверстие 7 в швеллере. Штоки 6 имеют на верхних концах пазы, в которых шарнирно закреплены плечи эксцентриковых рычагов 8. Между диафрагмой 4 и верхней стойкой корпуса 3 установлена пружина 9. Средний эксцентриковый рычаг выполнен длиннее других, а его конец является рукояткой 10. Все эксцентриковые рычаги своими вторыми плечами шарнирно соединены с продольной тягой 11. К тяге 11 и швеллеру прикреплены ручки 12. Захват устанавливается на ряд облицовочных плиток 13, уложенных с заданным расстоянием между ними.
Работает захват следующим образом.
При перемещении рукоятки 10 происходит одновременный поворот всех эксцентриковых рычагов 8, которые перемещают штоки 6, а следовательно, и диафрагмы 4, создавая разрежение в вакуум-захватных камерах, установленных на поверхности ряда плиток 13. Вакуумный захват с включенными вакуум-захватными камерами, на которых удерживается ряд плиток, перемешают за ручки 12 в необходимое проектное положение, устанавливая ряд плиток и закрепляя их, перемепд,ением рукоятки Ш в противоположную сторону освобождают захват, и цикл повторяется.
Вакуумный захват обеспечивает надежную и эффективную работу по перемещению и установке строительных облицовочных плиток.
Формула изобретения
Вакуумный захват, например для облицовочных строительных плиток, содержащий корпус с рукоятками, вакуум-захватные камеры с гибкими диафрагмами, штоки, соединенные нижними концами с диафрагмами, и эксцентриковые рычаги, одно плечо каждого из которых шарнирно связано с верхним концом штока, отличающийся тем, что, с целью повышения производительности путем обеспечения одновременного захвата ряда плиток, лежащих в одной плоскости, с сохранением заданного расстояния между ними, он снабжен продольной тягой, шарнирно связанной с вторыми плечами эксцентриковых рычагов, образующей вместе с корпусом шарнирный параллелограмм, при этом второе плечо одного из эксцентриковых рычагов выполнено удлиненным для одновременного перемещения вручную всех диафрагм захвата.
РГсточники информации,
принятые во внимание при экспертизе 1. Гницевич Е. П. Технология и механизация стекольных работ. М., Стройиздат, 1973, с. 52.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захват | 1978 |
|
SU779243A1 |
| Вакуумная грузозахватная траверса | 1979 |
|
SU903275A1 |
| Устройство для набора и укладки облицовочных плиток в подвижный матричный конвейер | 1982 |
|
SU1036553A1 |
| Захватное устройство для облицовочных плит | 1976 |
|
SU600068A1 |
| Автоматическое вакуумное захватное устройство | 1976 |
|
SU616219A1 |
| УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЖЕЛЕЗОБЕТОННЫХИЗДЕЛИЙ | 1972 |
|
SU435936A1 |
| Устройство для облицовки поверхностей | 1978 |
|
SU727806A1 |
| Устройство для растаривания емкостей | 1982 |
|
SU1115973A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОЧНОСТИ СЦЕПЛЕНИЯ ОБЛИЦОВОЧНОГО ПОКРЫТИЯ СТРОИТЕЛЬНОЙ КОНСТРУКЦИИ | 2006 |
|
RU2335765C1 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1993 |
|
RU2041087C1 |
12
}2
игл
to
