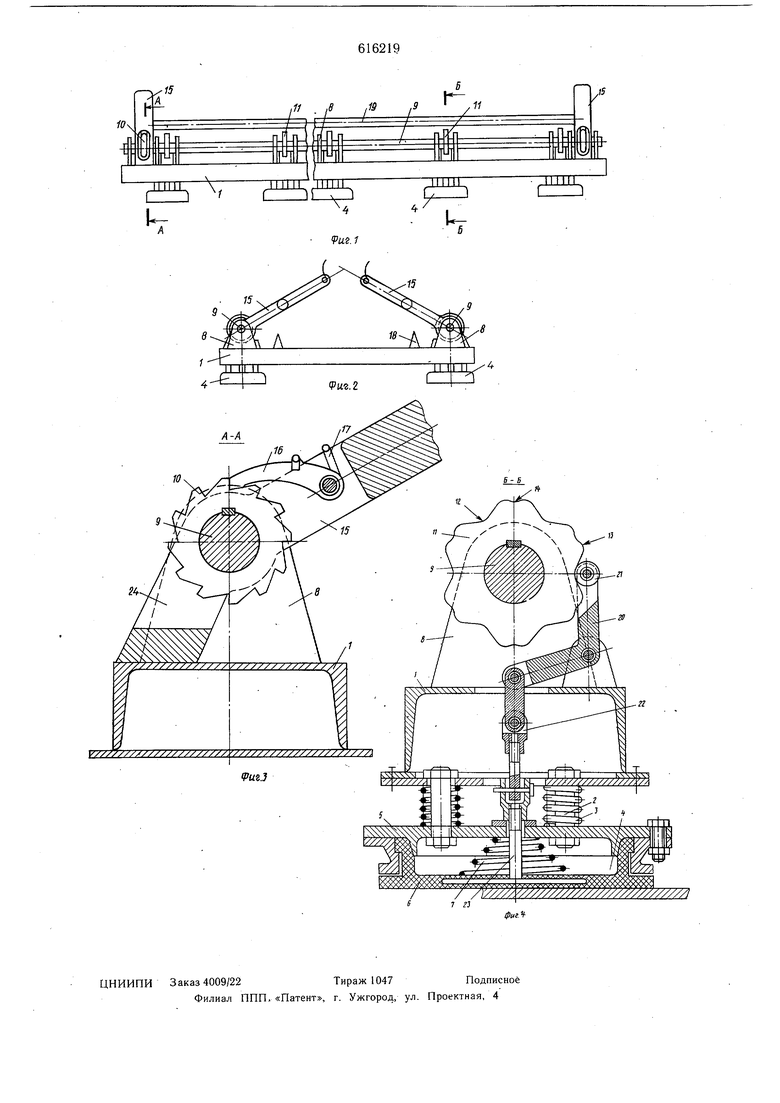
лированным кулачком, храповым колесом и шарнирно закрепленным кронштейном, который в верхней своей части соединен с крюком крана, а в нижней посредством собачки - с храповым колесом, причем кронштейн снаб жен упором, взаимодействующим с корпусом, а на корпусе устройства шарнирно установлен двуплечий угловой рычаг, одно плечо которого взаимодействует с профилированным кулачком, а другое посредством тяги соединено со штоком вакуумной камеры. На фиг. 1 изображено предлагаемое устройство, вид спереди; на фиг. 2 - то же, вид сбоку; фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 1. На корпусе 1 посредством осей 2, подвижно закреплены через пружины 3 вакуумные захваты 4 в виде камер, состоящие из основания 5, армированной резиновой диафрагмы 6 и пружины 7. На корпусе 1 в опорах 8 расположены валы 9, на которых жестко закреплены храповые колеса 10 и профилированные кулачки 11, имеющие ряд равномерно чередующихся впадин 12 и зубообразных выступов 13, на верщинах которых размещены более мелкие фиксирующие впадины 14. При этом сумма мелких впадин 14 и больших впадин 12 равна числу зубьев храпового колеса 10. На валах 9 шарнирно установлены кронштейны 15, которые снабжены в нижней своей части храповыми собачками 16 с пружинами 17. Корпус 1 устройства оборудован ограничителями хода 18 кронштейнов 15, которые попарно соединены стержнями 19, и на нем также шарнирно установлены двуплечие угловые рычаги 20, посредством роликов 21 связанные с кулачками 11. Двуплечие рычаги 20 соединены тягой 22 и штоком 23 с диафрагмами 6 захватов. Кронштейны 15 выполнены с упорами 24, взаимодействующими с корпусом 1 и.охватывающими храповые колеса 10. Устройство работает следующим образом. При опускании корпуса 1 устройства вакуумные захваты 4 накладываются на изделие, а кронштейны 15 под собственным весом продолжают поворачиваться до соприкосновения с ограничителями хода 18, при этом храповые собачки 16 сначала скользят по тыльной стороне одного из зубьев храповых колес 10, а затем западают в их впадины. При подъеме устройства через кронштейны 15 последние поворачиваются на в-еличину зазора между упорами 24 и корпусом 1 устройства. В это время каждая храповая собачка 16, расположенная во впадине храпового колеса 10, поворачивает его на один зуб, что приводит во вращение вал 9 и соответственно, профилированный кулачок 11. Кулачок И, поворачиваясь, последовательно воздействует на ролики 21, устанавливаемые во впадинах 14 выступов 13, двуплечий угловой рычаг 20, тягу 22, шток 23 и деформируют диафрагму 6 захвата 4, создавая в ней вакуум. После доставки изделия к месту проведения последующих операций его вместе с устройством опускают на опору, при этом кронштейны 15 вновь поворачиваются на валах 9 до соприкосновения с ограничителями хода 18, а каждая храповая собачка 16 западает во впадину следующего зуба храпового колеса 10. При последующем подъеме кронштейнов 15 храповое колесо поворачивается на один зуб и устанавливает ролик 21 рычага 20 во впадинах 12 профилированного кулачка 11, вследствие чего освобождается пружина 7, которая возвращает диафрагму 6 в исходное положение, ликвидируя вакуум под ней. Так как механизм перемещения щтоков обеспечивает также фиксацию щтоков в рабочем и нерабочем положениях, достигается упрощение конструкции, а также уменьшение количества деталей автоматического вакуумного захвата. Формула изобретения Автоматическое вакуумное захватное устройство, содержащее навешиваемый на крюк крана корпус с вакуумными захватами, выполненными в виде камер с перемещающимися внутри них подпружиненными штоками, на которых закреплены диафрагмы, механизм перемещения штоков и фиксаторы штоков в рабочем и нерабочем положениях, отличающееся тем, что, с целью упрощения конструкции, механизм перемещения каждого щтока выполнен в виде установленного на корпусе поворотного вала с жестко закрепленными на нем профилированным кулачком, храповым колесом и щарнирно закрепленным кронштейном, который в верхней своей части соединен с крюком крана, а в нижней посредством собачки - с храповым колесом, причем кронштейн снабжен упором, взаимодействующим с корпусом, а на корпусе устройства щарнирно установлен двуплечий угловой рычаг, одно плечо которого взаимодействует с профилированным кулачком, а другое посредством тяги соединено со щтоком вакуумной камеры. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 171529, М. Кл.2 В 66 С 1/02, 1965. 2.Патент США № 2776857, кл. 294-64, 1964.
15
// . ,в ,19
/0s
Б /
11
44
V
«Риг. f
7™
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |
| Храповой механизм | 1981 |
|
SU1033800A1 |
| Устройство для транспортирования живой рыбы вертолетом | 1986 |
|
SU1358871A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444429C1 |
| ПИШУЩАЯ МАШИНКА | 1971 |
|
SU322874A1 |
| Устройство для штабелирования деталей с отверстиями | 1986 |
|
SU1459780A2 |
| Храповой аварийный останов | 1980 |
|
SU941754A1 |
| ПЕЧАТНО-ОТМЕТОЧНАЯ МАШИНА | 1968 |
|
SU210186A1 |