1
Изобретение относится к сельскохозяйственному оборудовангоо, а именно к устpoйcтвa t для стряхивания плодов.
Известны устройства для стряхивания плодов, включающие инерционный tx)p с подвижным и неподвихсным упорами захвата штамба, механизмы привода и зажима вибратора lj| .
Недостатком таки.к устройств явяяетЬя то, что производимое оператором ручное изменение режимов работы вибратора и усилия зажима штамба, в зависи юсти .от его диаметра, снижает эффективность уборки и приводит к повреждениям деревьев.
Известно также устройство для стря хивания плодов, включающее инерционный вибратор с подвижным и неподвижным упорами захвата штамба, механизмы привода и зажима вибратора и схему управления причем последняя выполнена в виде профилированного кулачка, жестко закрепленного на подвижном упоре захвата, а механизм привода снабжен регулятором
Частоты с рычагом, кинематичс-ски связанньш с 7сулачком и вибратором {2} .
Недостатком этого устройства являет- ся то, что автоматическая установка оптимального (в. зависимости от диаметра штамба встряхиваемого дерева) , но стационарного по частоте работы вибратора не дает полного встряхивания плодов. Кроме того, оператор вручную изменяет усилия зажима вибратором дерева в зависимости от его диаметра, что отрицательно I сказьпвается на эффективности уборки и приводит к дополнительным повреждениям деревьев.
Цель изобретения - повьшгеяие эффек5тивности работы и уменьшения повреждения деревьев.
Это достигается тем, что механизм привода вибратора имеет управляемый дроссель-регулятор; установленный перед
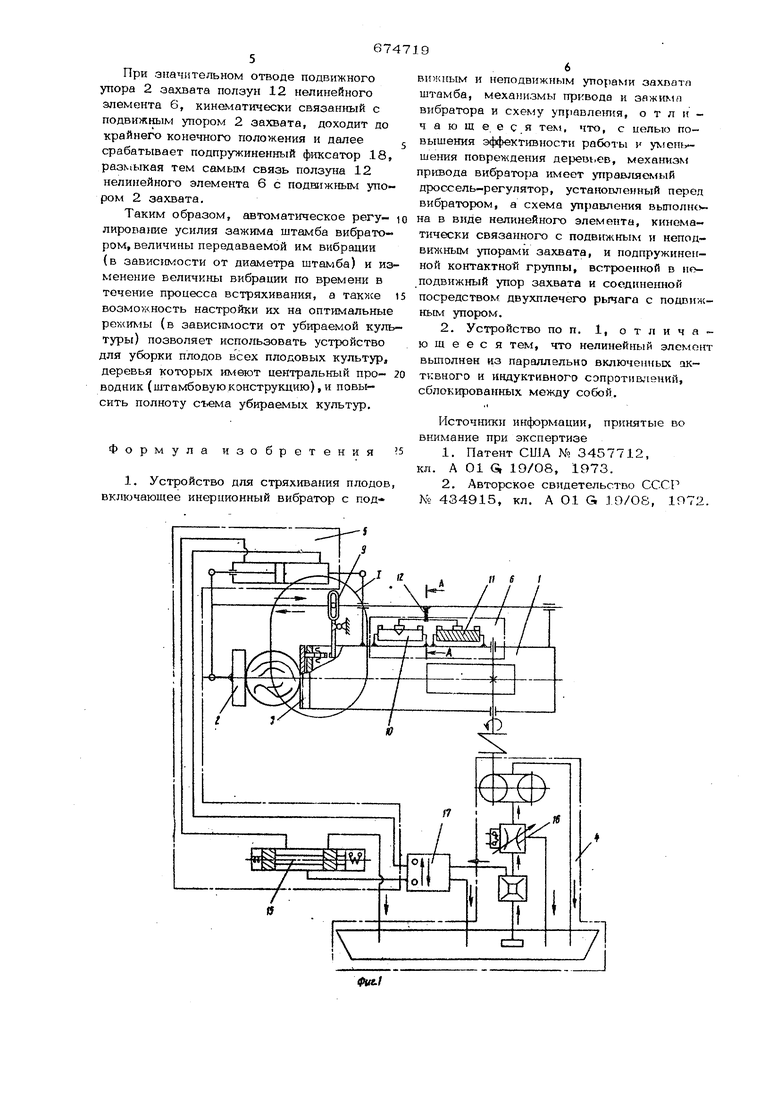
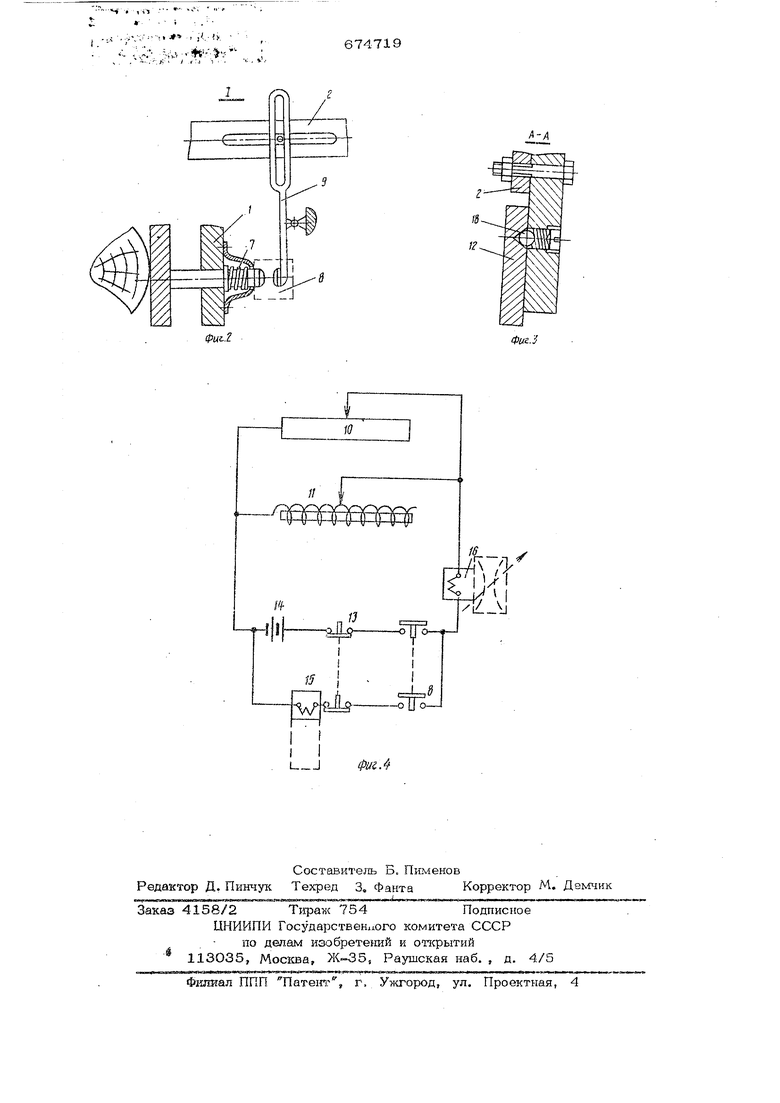
0 вибратором, а схема управления выполнена в виде нелинейного электента, кинематически связанного с подвижньгм и не 1ОДВИЖНЫМ упорами захвата, и подпружи.,,;9 rraKTHofl группы, встроенной в неподвижный упор захвата и соединенной пЬсредством двухплечего рычага с подвиж ным упором. Кроме того, нелинейный элемент вы, попнен из параллельно-включенных активного и индуктивного сопротивлений, сблокированных между собой. На фиг. 1 дана принципиальная схема устройства; на фиг. 2 - узел 1 на фиг 1; на фиг. 3 - разрез А-А на фиг, 1; на фиг. 4 - схема управления мехаьшзма ми привода и зажима вибратора. Устройство состоит из инерционного вибратора 1 с подвижным 2 и неподвижным 3 упорами захвата, механизмов привода 4 и зажима 5 вибратора со сх€;мой их управления. Последняя выполнена из нелинейного элемента 6, кинематически связанного с подвижным 2 и неподви кным 3 упорами захвата, и подпружиненной возвратной пружиной:7 контактной группы 8, встроенной в неподвижный упор 3 зах вата и соединенной посредством двухплечего рычага 9 с подвижным упором 2. Нел инейный э;1емент 6 выполнен из па- раллельно подключенных активного 1О и индуктивного 11 сопротивлений, сблокированных меяшу собой и через ползун 12 соединенных с подвижным упором 2 захвата. Схема управления посредством контакта 13 подключена к источнику тока 14 В механизме зажима вибратора уста- новлен золотник 15 с электромагнитным управлением, а в механизме привода 4 вибратора перед ним установлен управляемый дроссель-регулятор 16, Гидрораспре-,. делитель 17 установлен на Чракторе, а фиксатор 18 - на ползуне 12. Предлагаемое устройство работает сле дующим образом. Предварительно производится настройка работы устройства на данную убираему конкретную культуру. OnepaWp эКШёрйментально устанавливает ползун 12 нелинейного элемента 6 и точку соединения двухплечего рычага 9 на подвижном упоре 2 захвата, определяющие оптимальные - , Г,- .,,.,. - Лгr aч:тч:; fti 7t 5 :-.,---.л;. .., усилия зажима и вибрации соответственно убираи ому сорту и диаметру штамба. подводится к с откры ШКГ ёХШтой iib с ЩрШое Шшйш% неподвижным упором 3. Вклй йетЧзй тракторны гидрораспределитепь 17, и масли поступает в полость гидроцилиндра мещцкзма зажима 5 вибратора, проходя через элект рический золотник 15, из другой полости. гидроцилиндра масло идет на слив чересэ тракторный гидрораспределитель 17. Подвижный упор захвата 2, переметдаясь через зажимаемый штамб воздействует на подпружиненную контактную группу 8, встроенную в неподвижный упор 3 вибратора и, сжимая возвратную пружину 7, замыкает электрическую схему управления вибратором 1. , В зависимости от диаметра зажимаемого щтамЬа автоматически устанавливают межконтактное расстояние контактной группы 8, огтрёделяющее уси лие зажима щтамба, и положение ползуш 12 нетинейнрто элемента б, кинематически связанного с подвижным упором 2 захвата и определяющее режим работы рйбратора 1. При замыкании контактной группы 8 к источнику тока 14 подключаются катутпки управления золотником 15 и дроссель-регулятором 16. При подключении катушки управления золотником 15 к источнику тока 14 плунжер его перемещается и пе- рекрьюает каналы, соединяющие тракторный гидрораспределитель 17 с нагнетающей полостью гидроцилиндра механизма зажима .5 вибратора, т, е. блокируют его в заданном положении. Масло при этом из тракторного гидрораспределителя 17 поступает через золотник 15 на слив в масляный бак. Пропускйая способность дросселя-регулятора 16, подключенного к источнику тока 14, определяется величиной проходящего тока через его катушку управления. Последняя .в свою очередь определяется положением ползуна 12 нелинейного элемента 6, автоматически устанавливаемого в зависимости от диаметра зажимаемого щтамба, и меняется по времени {по закону, определяемому этим полржением) ,В результате этого величина передаваемой штамбу дерева вибрации будет переменной по времени и меняется по тому же закону. . После окончания процесса встряхивания оператор натяжением кнопки сблокированных нормально-закрытых контактов 13 обесточивает катушки управления золотни-. coм. 1.5 и дросселем-регулятором 16. В результате этого дроссель-регулятор 16 будет пропускать через себя все iwacло на слив, ггрекреацая вибрацию. Переводя рукоятку тракторного гидрораспределиеля 17 в требуемое положение, оператор произвойит отвод подвижного упора 2 захвата от щтамба дерева, и под дейстбием возвратной пружины 7 происходит размыкание контактной-группы 8. При значительном отводе подвижного упора 2 захвата ползун 12 нелинейного элемента 6, кинематически связанный с подвижным упором 2 захвата, доходит до крайнего конечного положения и далее срабатывает подпружиненный фиксатор 18, разк1ыкая тем самым связь ползуна 12 нелинейного элемента 6 с подвижным упо« ром 2 захвата. Таким образом, автоматическое регулирование усилия зажима штамба вибрато ром, величины передаваемой им вибрации (в зависимости от диаметра штамба) и из менение величины вибрации по времени в течение процесса встряхивания, а также возможность настройки их на оптимальные (в зависимости от убираемой кул туры) позволяет использовать устройство для уборки плодов вСех плодовых культур, деревья которых имеют центральный про водник (штамбовуюконструкцию), и повысить полноту С1.ема убираемых культур. Формула изобретения 1. Устройство для стряхивания плодов включающее инерционный вибратор с под вижным и неподвижным упорами захвата штамба, механизмы привода и зажимп вибратора и схему управления, отличающее с.я тем, что, с целью повышения эффективности работы и уменьшения повреждения aepeBtieB, механизм привода вибратора имеет управляектый дроссель-регулятор, устано1 ленный перед вибратором, а схема управления выполне на в виде нелинейного элемента, кинема- тически связанного с подви инык{ и неподвижным упорами захвата, и подпружиненной контактно группы, встроенной в неподвижный упор захвата и соединенной посредством двухплечего рычага с поовижным упором. 2. Устройство по п. 1, отличающее с я тем, что нелинейный элемент вьшолнен и.з параллельно включенных активного и индуктивного сопротивлений, сблокированных между собой. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3457712, кл. А 01 G, 19/08, 1973. 2.Авторское свидетельство СССР № 434915, кл. А О1 G J9/OS, 1972.
(. .-:S -.Vi-;- и.- .- ,
,s, 4vi.- t:-l ;
.,; , ---.лл;; ,,-;j . ..
674719

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стряхивания плодов | 1980 |
|
SU873954A2 |
| Устройство для стряхивания плодов | 1981 |
|
SU990126A1 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
| Турельный стряхиватель плодов с деревьев | 1981 |
|
SU959676A2 |
| Захватное устройство для стряхивания плодов | 1983 |
|
SU1170988A1 |
| Устройство для уборки плодов | 1977 |
|
SU635919A1 |
| Стряхиватель плодов | 1980 |
|
SU886814A1 |
| Стряхиватель плодов | 1978 |
|
SU731922A2 |
| Устройство для стряхивания плодов | 1980 |
|
SU880327A2 |
| Инерционный стряхиватель | 1984 |
|
SU1346070A2 |
/1 I Lt
