(54) ТУРЕЛЬНЫЙ СТРЯХИВАТЕЛЬ ПЛОДОВ С ДЕРЕВЬЕВ
1
Изобретение относится к сельскохозяйственному машиностроению, в частности к плодоуборочным машинам инерционного типа.
По основному авт. св. № 273569 известен турельный стряхиватель плодов с деревьев, включающий стрелу, оборудованную подвижным и неподвижным упорами захвата штамба дерева или его ветвей и инерционным вибратором, причем на стреле закреплена емкость, выполненная в виде ю кольцевых цилиндрических баков, охватывающих стрелу и заполняемых жидкостью. Для заполнения емкости жидкостью имеются резервуар и компрессор, нагнетательной магистралью соединенные между собой. Кроме того, в цилиндрических баках вставлены порщни, разделяющие баки на две полости 1.
Недостатком известного стряхнвателя является то, что он не создает, наиболее рациональных условий стряхивания плодов 20 с деревьев и ветвей различной толщины, поскольку масса стряхивателя в процессе стряхивания является постоянной величиной и не находится в наиболее рациональных соотношениях с массой встряхиваемого объекта (дерева или ветви) в каждом конкретном случае. Это в конечном итоге снижает эффективность стряхивания плодов.
Целью изобретения является повышение эффективности съема плодов путем автоматического регулирования массы стряхивателя в зависимости от диаметра штамба дерева или ветви.
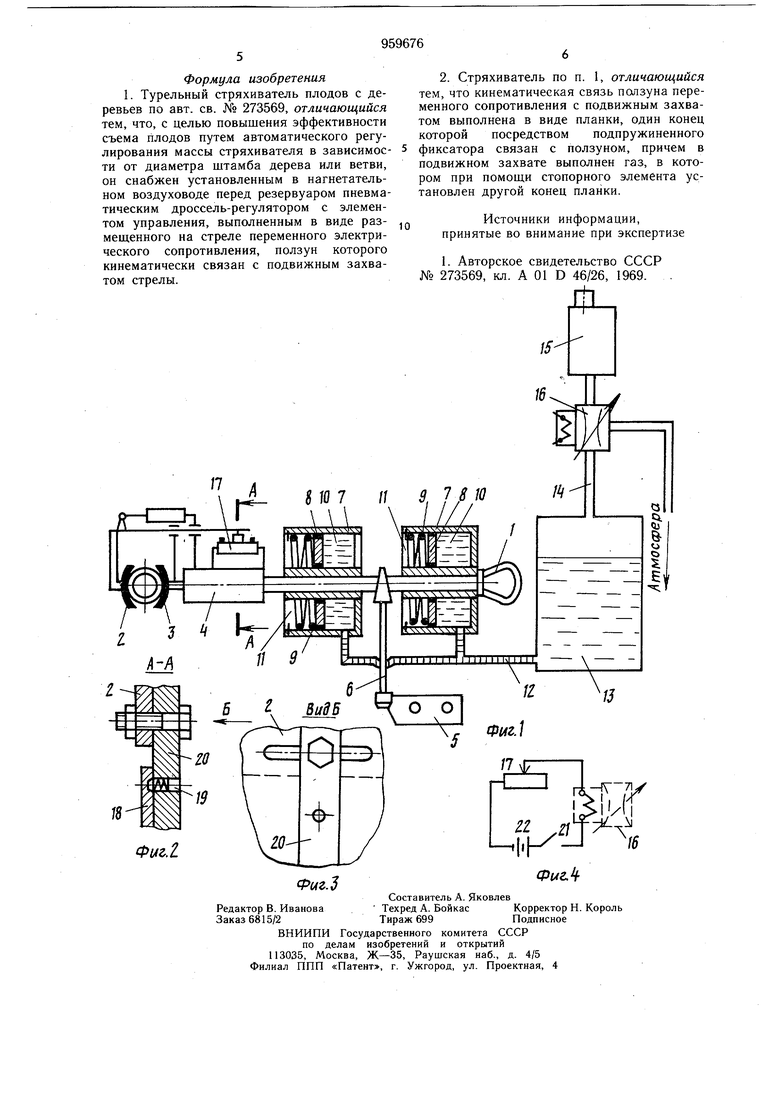
Указанная цель достигается тем, что турельный стряхиватель плодов с деревьев снабжен установленным в нагнетательном воздуховоде перед резервуаром пневматнческим дроссель-регулятором с элементом управления, выполненным в виде размещенного на стреле переменного сопротивления, ползун которого кинематически связан с подвижным захватом стрелы.
Причем кинематическая связь ползуна переменного сопротивления с подвижным захватом выполнена в виде планки, один конец которой посредством подпружиненного фиксатора связан с ползуном, причем в подвижном захвате выполнен паз, в котором посредством стопорного элемента установлен другой конец планки. 3 На фиг. i изображена принципиальная схема турельного стряхивателя плодов с деревьев; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - электрическая схема управления работой пневматическим дроссельрегулятором. Турельный стряхиватель плодов с деревьев включает стрелу 1, оборудованную подвижным 2 и.неподвижным 3 упорами захвата штамба дерева или его ветвей и инер-,о ционным вибратором 4, и монтируется на враш,ающемся в горизонтальной плоскости кронштейне 5 при помоши вертикальной оси 6, которая расположена в центре тяжести стряхивателя. Такая компоновка стряхивателя обеспечивает ему все степени свободы, необходимые во время работы. На стреле соосно и симметрично закреплены кольцевые цилиндрические баки 7, внутри которых имеются подвижные поршни 8, подпружиненные пружиной 9 и разделяю- о щие баки на две полости 10 и И, первая из которых трубопроводом 12 соединена с резервуаром 13, заполненным тяжеловесной жидкостью. Резервуар 13 соединен нагнетательной магистралью 14 с компрессором 15. Регулировка подачи воздуха осуществляется с помощью управляемого дроссель-регулятора 16, схема управления которого выполнена в виде переменного электрического элемента, например активного сопротивления 17, кинематически свя-зо занного с подвижным 2 и неподвижным 3 упорами захвата. Ползун 18 переменного сопротивления 17 с помощью подпружиненного фиксатора 19 и промежуточной планки 20 соединен с подвижным упором 2 захвата. Причем точка соединения промежу-35 точной планки 20 с подвижным упором 2. захвата имеет возможность устанавливаться и фиксироваться вдоль направляющего паза подвижного упора. Схема управления посредством контакта 21 подключена к источнику 22 тока. Турельный стряхиватель. плодов с деревьев работает следующим образом. Предварительно производится настройка устройства на данную убираемую конкретную культуру. Оператор экспериментальноi5 устанавливает точку соединения ползуна 18 с подвижным упором 2 захвата в такое положение, при котором создаются оптимальные условия (т. е. масса стряхивателя будет оптимальной) встряхивания плодовJQ соответственно убираемому сорту и диаметру штамба дерева (или скелетной ветви). Далее оператор подводит стрелу с захватом к шта.мбу дерева или его скелетной ветви. При этом электромагнит пневматического дроссель-регулятора 16 обсточен55 и воздух из компрессора 15 через дроссельрегулятор 16 уходит в атмосферу. Подпру95966 4 жиненные поршни 8 вытесняют жидкость из полостей 10 по трубопроводу 12 в резервуар 13. Далее оператор с помощью перемещения подвижного упора 2 производит зажим объекта встряхивания. Одновремен-ко с. этим он нажимает на контакт 21, подключая тем самым электромагнит дроссель-регулятора 16 и переменное сопротивление 17 к источнику 22 тока. В зависимости от диаметра штамба дерева или скелетной ветви автоматически устанавливается положение ползуна 18 сопротивления 17, которое определяет величину тока, проходяшего через электромагнит дроссельрегулятора 16 при подключении его к источнику 22 тока. Поскольку пропускная способность дроссель-регулятора зависит от величины проходящего через его катущку тока, то естественно, что положение ползуна 18 сопротивления 17 и будет определять эту пропускную способность. В зависимости от пропускной способности дроссель-регулятора 16 будет происходить заполнение соответствующего объема полостей 10 тяжеловесной жидкостью из резервуара 13, которое в конечном итоге определяет массу турельного стряхивателя в процессе встряхивания плодов, а значит и условия протекания самого процесса. Таким образом, масса турельного стряхивателя будет все время автоматически определяться диаметром штамба дерева или его скелетной ветви. После заполнения полостей 10 жидкостью оператор включает вибратор 4, в результате чего происходит встряхивание плодов. После встряхивания плодов останавливают вибратор, контактом 21 обесточивают электромагнит дрос-сельрегулятора 16, в результате чего жидкость из полостей 10 подвижными подпружиненными поршнями 8 вытесняется в резервуар 13, и производят отвод подвижного упора 2 захвата. При значительном отводе подвижного упора 2 захвата ползун 18 переменного сопротивления 17, кинематически связанный с подвижным упором 2 захвата, доходит до крайнего конечного положения и далее срабатывает подпружипенный фиксатор 19, размыкая тем самым связь ползуна 18 переменного сопротивления 17 с подвижным упором 2 захвата. Использование изобретения позволит производить автоматическое регулирование массы стряхивателя в зависимости от диаметpa щтамба дерева или его скелетной ветви, создать наиболее рациональные условия протекания процесса встряхивания плодов на каждом конкретном плодовом дереве, что в конечном итоге повысит эффективность встряхивания плодов (т. е. увеличивается полнота съема плодов, повышается производительность работы и снижается энергоемкость процесса встряхивания).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стряхивания плодов | 1977 |
|
SU674719A1 |
| СТРЯХИВАТЕЛЬ ПЛОДОВ | 1993 |
|
RU2081550C1 |
| Устройство для стряхивания плодов | 1980 |
|
SU873954A2 |
| Устройство для стряхивания плодов | 1981 |
|
SU990126A1 |
| Устройство для стряхивания плодов | 1980 |
|
SU880327A2 |
| Устройство для стряхивания плодов | 1990 |
|
SU1750475A1 |
| Стряхиватель плодоуборочнойМАшиНы | 1978 |
|
SU818542A1 |
| Стряхиватель плодов | 1978 |
|
SU731922A2 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
| Способ стряхивания плодов с деревьев | 1980 |
|
SU934977A1 |
