(54) УСТРОЙСТВО ДЛЯ СТРЯХИВАНИЯ ПЛОДОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стряхивания плодов | 1980 |
|
SU873954A2 |
| Устройство для стряхивания плодов | 1977 |
|
SU674719A1 |
| Устройство для стряхивания плодов | 1987 |
|
SU1419578A1 |
| Турельный стряхиватель плодов с деревьев | 1981 |
|
SU959676A2 |
| Устройство для встряхивания деревьев | 1978 |
|
SU709030A2 |
| Стряхиватель плодов | 1980 |
|
SU886814A1 |
| Стряхиватель плодов | 1978 |
|
SU731922A2 |
| Инерционный встряхиватель | 1990 |
|
SU1722291A1 |
| Устройство для стряхивания плодов | 1980 |
|
SU880327A2 |
| СТРЯХИВАТЕЛЬ ПЛОДОВ | 1993 |
|
RU2081550C1 |

.1
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для стряхивания плодов.
Известно устройство для стряхивания плодов, включающее инерционный вибратор с подвижным и неподвижным упорами захвата штамба, механизм привода и зажима вибратора и схему управления, причем последняя выполнена в виде профильного кулачка, жестко закрепленного на подвижном упоре захвата, механизм привода снабжен регулятором частоты с рычагом, кинематически связанным с кулачком и вкбратором 1.
Недостатком этого устройства является то, что автоматическая установка оптимального, но стационарного по частоте режима работы вибратора не дает полного стряхивания плодов.
Наиболее близким к изобретению по технической суш,ности является устройство для стряхивания плодов, содержащее раму, вибратор с подвижным и неподвижным упорами захвата, механизмами привода и зажима и схемой управления, выполненной в виде нелинейного элемента и контактов, один из
которых подпружинен и встроен в неподвижный упор захвата (2.
Однако известное устройство для стря- хивания плодов не обеспечивает фиксиро-. вания оптимального усилия зажима штамба
5 в зависимости от его диаметра в процессе встряхивания деревьев, так как гтодпружиненный контакт имеет подвижность в сторону сжатия пружин, что приводит к появлению зазора междуштамбом и неподвижным
,0 упором захвата и, в конечном итоге, отрицательно сказЪ1вается на эффективности ра: боты и повреждаемости деревьев.
Цель изобретения- повышение эффективности работы и уменьшение повреждения деревьев.
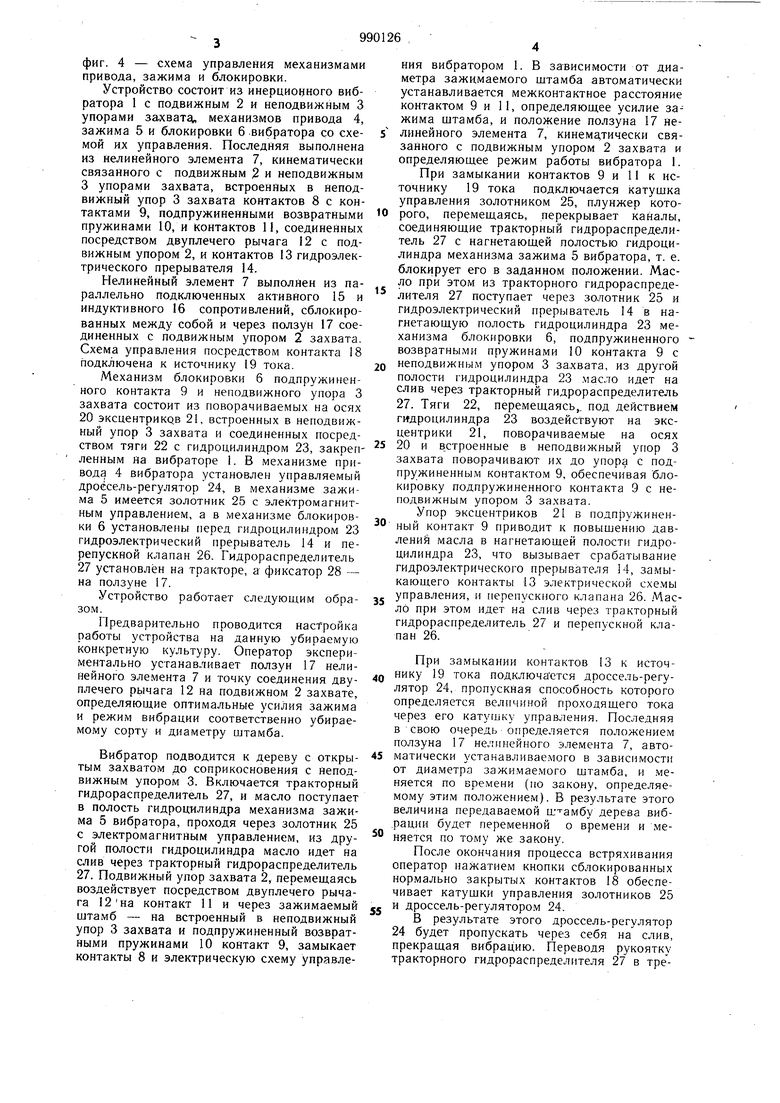
Данная цель достигается тем, что вибратор снабжен механизмом блокирования подпружиненного контакта, имеющим установленные на неподвижном упоре посредством осей эксцентрики и смонтиррв.анный
20 на раме гидроцилйндр с гидроэлектрическим прерывателем, причем гидроцилиндр посредством тяг связан с эксцентриками. На фиг. I дана принципиальная схема устройства; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез А-lA на фиг. 1; на фиг. 4 - схема управления механизмами привода, зажима и блокировки. Устройство состоит из инерционного вибратора 1 с подвижным 2 и Неподвижным 3 упорами захвата механизмов привода 4, зажима 5 и блокировки 6 вибратора со схемой их управления. Последняя выполнена из Нелинейного элемента 7, кинематически связанного с подвижным 2 и неподвижным 3 упорами захвата, встроенных в неподвижный упор 3 захвата контактов 8 с контактами 9, подпружиненными возвратными пружинами 10, и контактов 11, соединенных посредством двуплечего рычага 12 с подвижным упором 2, и контактов 13 гидроэлектрического прерывателя 14. Нелинейный элемент 7 выполнен из параллельно подключенных активного 15 и индуктивного 16 сопротивлений, сблокированных между собой и через ползун 17 соединенных с подвижным упором 2 захвата. Схема управления посредством контакта 18 подключена к источнику 19 тока. Механизм блокировки б подпружиненного контакта 9 и неподвижного упора 3 захвата состоит из поворачиваемых на осях 20 эксцентрикав 21, встроенных в неподвижный упор 3 захвата и соединенных посредством тяги 22 с гидроцилиндром 23, закрепленным На вибраторе 1. В механизме привода 4 вибратора установлен управляемый дроссель-регулятор 24, в механизме зажима 5 имеется золотник 25 с элеКтромагнитным управлением, а в механизме блокировки 6 установлены перед гидроцилиндром 23 гидроэлектрический прерыватель 14 и перепускной клапан 26. Гидрораспределитель 27 установлен на тракторе, а фиксатор 28 - на ползуне 17. Устройство работает следующим образом. Предварительно проводится настройка работы устройства на данную убираемую конкретную культуру. Оператор экспериментально устанавливает ползун 17 нелинейного элемента 7 и точку соединения двуплечего рычага 12 на подвижном 2 захвате, определяющие оптимальные усилия зажима и режим вибрации соответственно убираемому сорту и диаметру штамба. Вибратор подводится к дереву с открытым захватом до соприкосновения с неподвижным упором 3. Включается тракторный гидрораспределитель 27, и масло поступает в полость гидроцилиндра механизма зажима 5 вибратора, проходя через золотник 25 с электромагнитным управлением, из другой полости гидроцилиндра масло идет на слив через тракторный гидрораспределитель 27. Подвижный упор захвата 2, перемещаясь воздействует посредством двуплечего рычага 12на контакт 11 и через зажимаемый штамб - на встроенный в неподвижный упор 3 захвата и подпружиненный возвратными пружинами 10 контакт 9, замыкает контакты 8 и электрическую схему управления вибратором 1. В зависимости от диаметра зажимаемого штамба автоматически устанавливается межконтактное расстояние контактом 9 и 11, определяющее усилие зажима штамба, и положение ползуна 17 нелинейного элемента 7, кинема,тически связанного с подвижным упором 2 захвата и определяющее режим работы вибратора 1. При замыкании контактов 9 и 11 к источнику 19 тока подключается катушка управления золотником 25, плунжер которого, перемещаясь, перекрывает каналы, соединяющие тракторный гидрораспределитель 27 с нагнетающей полостью гидроцилиндра механизма зажима 5 вибратора, т. е. блокирует его в заданном положении. Масло при этом из тракторного гидрораспределителя 27 поступает через золотник 25 и гидроэлектрический прерыватель 14 в нагнетающую полость гидроцилиндра 23 механизма блокировки 6, подпружиненного возвратными пружинами 10 контакта 9 с неподвижным упором 3 за.хвата, из другой полости гидроцилиндра 23 масло идет на слив через тракторный гидрораспределитель 27. Тяги 22, перемещаясь,, под действием гидроцилиндра 23 воздействуют на эксцентрики 21, поворачиваемые на осях 20 и выстроенные в неподвижный упор 3 захвата поворачивают их до упора с подпружиненным контактом 9, обеспечивая блокировку подпружиненного контакта 9 с неподвижным упором 3 захвата. Р эксцентриков 21 в подпружинен Ь1и контакт 9 приводит к повышению давления масла в нагнетающей полости гидроцилиндра 23, что вызывает срабатывание гидроэлектрического прерывателя 14, замыкающего контакты 13 электрической схе.мы управления, и перепускного клапана 26. Масло при этом идет на слив через тракторный гидрораспределитель 27 и перепускной клапан 26. При замыкании контактов 13 к источ У 9, ™ подключается дроссель-регу,„ лятор 24, пропускная способность которого определяется величиной проходящего тока через его катушку управления. Последняя в свою очередь определяется положением ползуна 17 нелинейного элемента 7, автоматически устанавливаемого в зависимости от диаметра зажимаемого штамба, и .меняется по времени (но закону, определяемому этим положением). В результате этого величина передаваемой дерева виб.рации будет переменной о времени и меняется по тому же закону. После окончания процесса встряхивания оператор нажатием кнопки сблокированных нормально закрытых контактов 18 обеспечивает катушки управления золотников 25 и дроссель-регулятором 24. В результате этого дроссель-регулятор 24 будет пропускать через себя на слив, прекращая вибрацию. Переводя рукоятку тракторного гидрораспределителя 27 в требуемое положение, оператор производит отврд подвижного упора 2 захвата от штамба дерева, поворачивает эксцентрики 21. в первоначальное исходное положение, и под действием возвратных пружин 10 происходит размыкание контактов 8.. При значительном отводе подвижного упора 2 захвата ползун 17 нелинейного элемента 7, кинематически связанный с подвижным упором 2 захвата, доходит до крайнего конечного положения, и далее срабатывает подпружиненный фиксатор 28, размыкая тем самым связь ползуна 17 нелинейного элемента 7 с подвижным упором 2 захвата. Автоматическое фиксирование оптимального усилия зажима штамба, в зависимости от его диаметра, в процессе встряхивания деревьев за счет блокировки подпружиненного контакта 9 с неподвижным упором 3 захвата позволит повысить полноту съема убираемых культур, за счет обеспечения автоматического фиксирования оптимального усилия зажима штамба в процессе встряхивания, а также сократить повреждаемость деревьев, подвергаемых механическому воздействию при механизированной уборке плодов.
16 1 7
/ / /.
.1 Формула изобретения Устройство для стряхивания плодов, содержащее раму, вибратор с подвижным и неподвижным упорами захвата, механизмом привода и зажима и схемой управления, выполненной в виде нелинейного элемента и контактов, один из которых подпружинен и встроен в неподвижный упор захвата. обличающееся тем, что, с целью повы1пения эффективности работы и уменьшения мовреждения деревьев, вибратор снабжен механизмом блокировки подпружиненного контакта, имеюшим установленные на неподвижном упоре посредством осей эксцентрики и смонтированный на раме гидроцилиндр с гидроэлектрическим прерывателем, причем гидроцилиндр посредством тяг связан с эксцентриками. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР Л 434915, кл. А 01 D 46/26, 1972. 2.Авторское свидетельство CCCI № 674719, кл.А 01 D 46/26, 1977
/1-/1
Фи&.З
