го закона, схваты манипуляторов движутся несогласованно, что приводит к ноявлению в нриводах обоих манинуляторон посторонних моментов сопротнвлснпя. В устройстве 5 эти моменты сравниваются с предел1 но доп стнмымн н, если их величина нрепынгает допустимый уровень, то с устройства 5 подается снгиал на переключатель 6, который переводит систему и в первую очередь программное устройство на режим компепсацни опасных моментов до допустнмого уровня. После ликвпдаппп опасных моментов система продолжает отработку псленаправлепных движепий до нового ноявления опасных моментов.
Формула изобретения
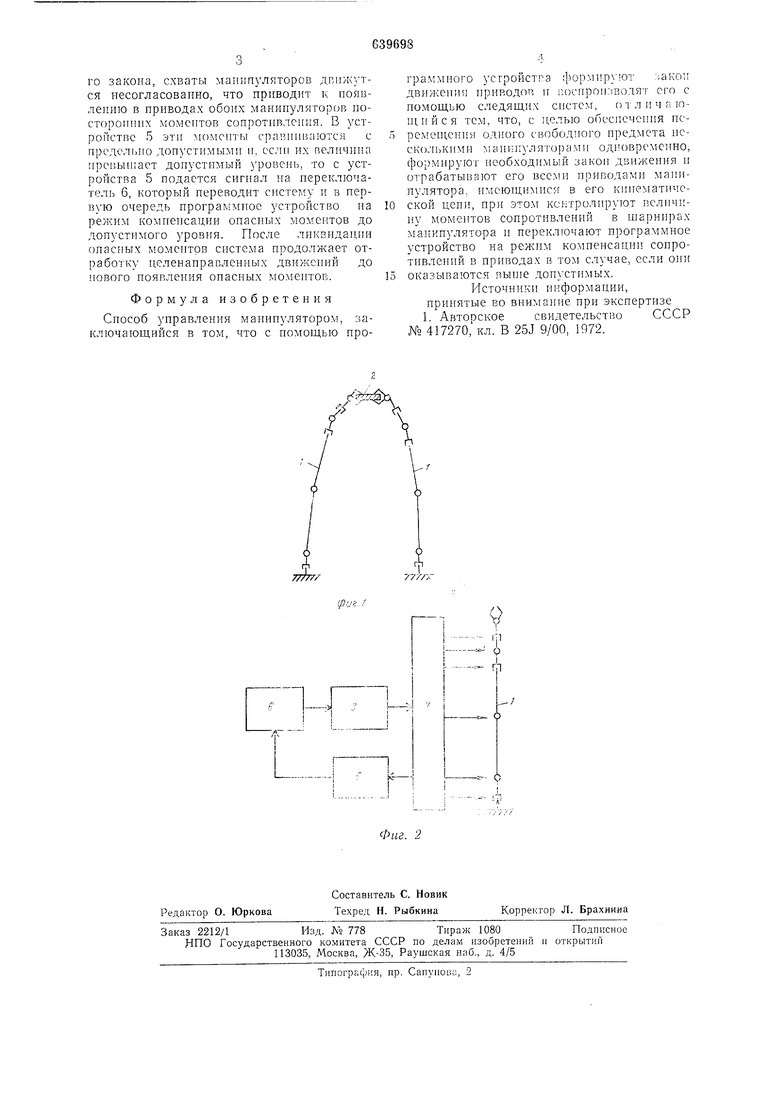
Способ управления манпнулятором, заключающийся в том, что с помощью программного усгройстпа |}юрмируют закон движения нрнводор. н поснронз.волят его с помощью следящих систем, отличаюни Йся тем, что, с целью обеспечения неремеи;ения одного свободного иредмета иееколькнмн манипуляторами од1К)временно, формируют необходимый закон движения и отрабатывают его всеми приводами манипулятора, имеющимися в его кинематической цепи, при этом контролируют 15еличииу моме)1тов сопротивлений в шарнирах манипулятора и переключают программное устройство на режим компенсапии сопротивлений в приводах в том случае, если они оказываются вьине донустнмых.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №417270, кл. В 25J 9/00, 1972.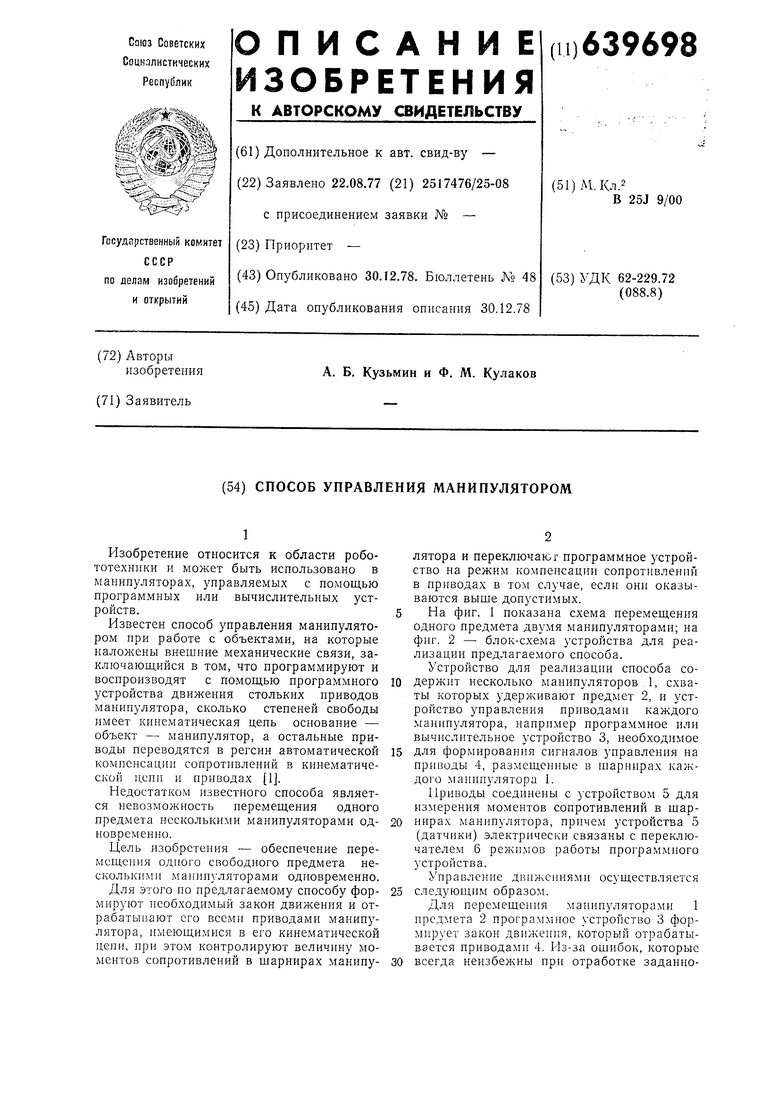
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления манипулятором и устройство для его осуществления | 1986 |
|
SU1318391A1 |
| Способ позиционно-силового управления автономным необитаемым подводным аппаратом с многостепенным манипулятором | 2023 |
|
RU2799176C1 |
| СПОСОБ ПОЗИЦИОННО-СИЛОВОГО УПРАВЛЕНИЯ АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ С МНОГОСТЕПЕННЫМ МАНИПУЛЯТОРОМ | 2023 |
|
RU2827123C2 |
| СПОСОБ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2022 |
|
RU2795317C1 |
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыММАНипуляТОРОМ | 1977 |
|
SU819794A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ МНОГОСТЕПЕННОГО МАНИПУЛЯТОРА | 2021 |
|
RU2771456C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННОГО ИСПОЛЬЗОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2446481C2 |
| ГЕОИНФОРМАЦИОННАЯ СИСТЕМА В ФОРМАТЕ 4D | 2017 |
|
RU2667793C1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РЕАБИЛИТАЦИОННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И ДИАГНОСТИКИ ПАЦИЕНТА С ЕГО ПОМОЩЬЮ | 2014 |
|
RU2564754C1 |
/
/
TT f777//(pui
/
Y
