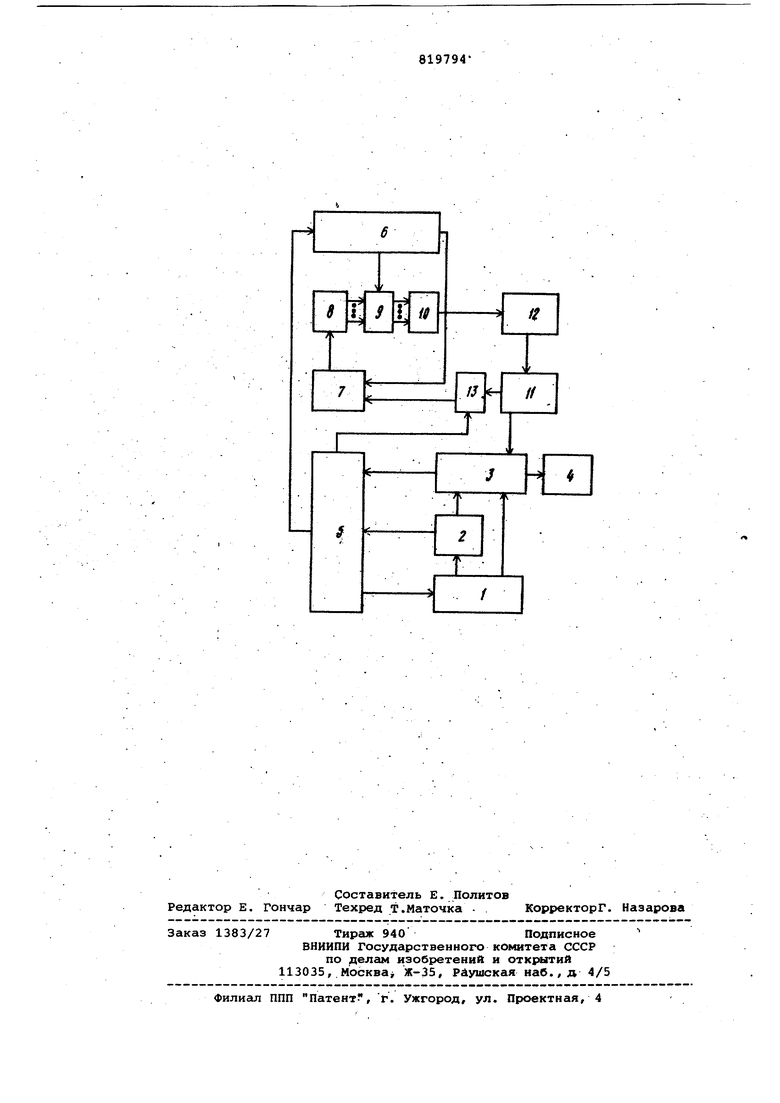
Изобретение относится к робототехнике и может быть использовано пр создании оптимальных по быстродейстВИЮ устройств управления многокоорди натными манипуляторами. Известно устройство для программного управления многокоординатным манипулятором, содержащее командные потенциометры, генератор синхроимпульсов, блок управления, распреде,литель .импульсов, коммутатор тл приводы манипулятора 1. Оно имеет низкое быстродействие. Наиболее близким техническим реш нием к изобретению является устройс во, содержсццее последовательно соединенные блок памяти,, первый дешифратор, линейный интерполятор и блок управления, второй вход которого по ключен к второму выходу первого дешифратора, а -первый выход - к входу блока памяти, второй выход которого через линейный интерпол.ятор подключен к входу шагового привода манипулятора 2. Недостатком известного устройств является низкое быстродействие управляемого манипулятора, т.е. большое время движения от одной точки траектории к другой. Целью изобретения является повышение быстродействия устройства. Достигается это тем, что устройство содержит последовательно соединенные первый счетчик,коммутатор, второй счетчик, блок элементов И, элемент ИЛИ блок коррекции, трет счетчик и второй дешифратор, выход которого подключен к второму входу коммутатора, а второй вход - к второму выходу блока управления, третий выход которого .соединен с входом перйого счетчика, второй выход которого подключен к соответствующему входу блока элементов И, а второй выход третьего счетчика соединен с третьим входом линейного интерполятора. На чертеже представлена функциональная схема устройства. Оно содержит блок памяти 1, первый дешифратор 2, линейный интерполятор 3, шаговый привод 4 манипулятора, елок управления 5, первый счетчик б, коммутатор. 7, второй счетчик 8, блок элементов И 9, элемент ИЛИ 10, третий счетчик 11, блок коррекции 12, второй дешифратор 13. Устройство работает следующим образом. При автоматическом воспроизведении программы информация,. описывающая переход охвата манипулятора из предадущей точки траектории в последующую, считывается по сигналам блока управления 5 из блока памяти 1 в линейный интерполятор 3. Первый дешифратор 2, анализируя признаки координат, считываемых из блока памяти 1 обеспечивает их правильную адресацию . по каналам линейного интерполятора 3 После считывания информации, полностью описывающей переход схвата от одной точки траектории к другой, пер вый дешифратор 2 формирует сигнал, по которому блок управления 5Прекра щает извлечение информации из блока, памяти 1. Повышение быстродействия манипулятора на шаговом приводе 4 обеспечивается формированием на входах при водов его степеней подвижности оптимального по критерию быстродействия сигнала управления. Этот сигнал управления имеет треугольный закон изм нения частоты и формируется следующим образом. После считывания всей информации, описывающей переход, с выхода блоке управления 5 на вход первого счетчика 6 .начинает поступать непрерывная последовательность импульсов. Сигнал переполнения первого счетчика 6 через коммутатор 7 поступает на вход второго счетчика 8, увеличивая на е;циницу находящееся в нем число. За счет сигналов, поступающих на входы блока элементов И 9 с импульсных выходов первого счетчика б и потенциальных выходов второго счетчика 8, и элемента ИЛИ 10 обеспечивается, линейное- увеличение частоты сиг нала управления на входе третьего счетчика 11, т.е. разгон шаговых дви .гателей перемещения координат манипулятора. Блок коррекции 12 служит для устранения неравномерности сигнала управления приводами манипулятора, -К которой критичен шаговый электропривод. Для формирования треугольного за. кона изменения частоты сигнала уп равления, обеспечивающего максималь ное быстродействие, второй дешифратор 13 дешифрирует число, равное половине максимально возможного в третьем счетчике 11, и переключает .коммутатор 7 в режим торможения, что обеспечивает убывание на 1 числа во втором счетчике 8 с каждьал циклом заполнения первого счетчика 6, т.е. лийейное уменьшение частоты сигнала управления приводом и торможение ша говых йриводов 4. В необходи мости может устанавливаться несколь ко градаций скорости. Для этого с выхода блока управления 5 на вход в рого дешифратора 13. поступает код .скорости, определяющий момент оконч . кия разгона и начала торможения. Та КИМ образом, наряду с треугольным законом изменения частоты могут форми-, роваться и трапецеидальные законы, повышающие гибкость управления скоростью. В линейном интерполяторе 3 за счет сигналов, поступающих с имрульсных выходов третьего счетчика 11, обеспечивается преобразование параллельного кода величины перемещения по соответствукйцим координатам в последовательный с одновременным началом и окончанием движения всех координат манипулятора независимо от величины их перемещения. Это обеспечивает прямолинейный характер траектории движения схвата, что позволяет увеличить скорость движения рабочего органа при тех же допустимых нагрузках на механизм манипулятора. Все это существенно сокращает время движения схвата от точки к точке, т.е. повышает быстродействие манипулятора. После окончания отработки информации, описывающей переход, по сигналу линейного интерполятора 3 блок управления 5 начинает новый цикл считывания информации и т.д. Таким образом, использование изобретения обеспечивает повышение быстродействия манипулятора, что в конечном счете ведет к повышению производительности систем автоматизации прои.зводственных процессов с использованием манипуляторов. Формула изобретения Устройство для программного управления многокоординатным манипулятором, содержащее последовательно соединенные блок памяти, первый дешифратор, линейный интерполятор и блок управления, второй вход которого подключен к второму выходу первого дешифратора, а первый выход - к входу блока памяти, второй выход которого через линейный интерполятор под- . ключен к входу шагового привода манипулятора , отличаю щееся тем, что, с целью повышения быстродействия устройства, оно содержит последовательно соединенные первый счетчик, коммутатор, второй счетчик, блок элементов И, элемент ИЛИ, блок коррекции, третий счетчик и второй дешифратор, выход которого подключен к второму входу коммутатора, а второй вход - к второму выходу блока управления, третий выход которого соединен с входом первого счетчика, второй выход которого подключен к соответствующему входу блока элементов И, а второй выход третьего счет чика соединен с третьим входом линейного интерполятора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 489629, кл. В 253 11/00, 1977. 2.Патент Франции 2236620, кл.В 25а 11/00,ОПУСЛИК..1976 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программногоупРАВлЕНия МНОгОКООРдиНАТНыММАНипуляТОРОМ | 1978 |
|
SU807215A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Система контурного программного управления манипулятором | 1977 |
|
SU620368A1 |
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| Устройство для программного управления | 1982 |
|
SU1108392A1 |
| Линейно-круговой интерполятор | 1979 |
|
SU847279A1 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Контурная система программного управления многокоординатным манипулятором | 1977 |
|
SU740491A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |