0
тг т
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1986 |
|
SU1320350A2 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Способ управления драглайном и устройство его осуществления | 1989 |
|
SU1707148A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ КОВША ОТНОСИТЕЛЬНО СТРЕЛЫ И БЛОКОВДРАГЛАЙНА | 1967 |
|
SU195077A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1320352A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1984 |
|
SU1232758A1 |
Изобретение относится к управлению э.тектроприводами одноковшовых экскаваторов-драглайнов. Пель - исключение опас ных динамических нагрузок для повышения срока службы подъемных канатов и уменьшения металлоемкости стреловой конструкции. Задают мин. значение нагрузки привода подъема (ПП), равное весу упряжи Gynp ковша- и распорной балки, которое обеспечивает поддержание «на весу распорной балки к упряжи ковша, если ковш находится под головными блоками. При этом измеряют расстояние Р от ковша до направ- ляюших блоков. В соответствии с измеренным расстоянием корректируют заданную мин. нагрузку привода Зимин ПП по ф-.че Sn мин Gynp при 1/1сТр (0,60,7) и Sll мин aXGynp при 1/Ьтр (0,6-0,7), где 1стр - длина стрелы; а (2-3) - коэфф., определяюш.ий верхний предел мин. допустимой нагрузки ПП; k (а-l) : (0,6-0,7)стр - коэф. пропорциональности. Скорректированную мин. нагрузку ПП сравнивают с текушей. При превышении ее уменьшают до нуля результируюший сигнал приводов поворота и тяги. Скорость ПП ограничивают значением (0,15-0,25) ее макс, значения. Устр-во для реализации способа содержит ПП 4, приводы поворота 9 и тяги 14, блоки 2, 7, 12 регулирования скоростей ПП и приводов поворота и тяги с командоаппаратами 1,5 и 10. Датчик 15 статического тока ПП связан с входами усилителя 16 с насышением и, релейного элемента (РЭ) 17. Датчик 18 расстояния через нелинейный элемент 19 подключен к вторы.м входам РЭ 17 и усилителя 16. На входе РЭ 17 сравниваются сигналы допустимой и текуилей нагрузки ПП, соотношение которых определяет наличие или отсутствие слабины подъемных канатов. С выхода РЭ 17 сигнал одновременно поступает на блок 2 и через ключи 6 и 11 на блоки 7 и 12 для устранения сигнала рассогласования. 2 с.п. ф-лы, 1 ил. (Л ГчЭ оо со 05
Изобретение относится к управлению главными электроприводами одноковшовых экскаваторов-драглайнов и предназначается для ограничения динамических нагрузок, дей ствующих на стреловую конструкцию и на электромеханическую систему привода подъема.
Цель изобретения - исключение опасных динамических нагрузок для повышения срока службы подъемных канатов и уменьшения металлоемкости стреловой рукции.
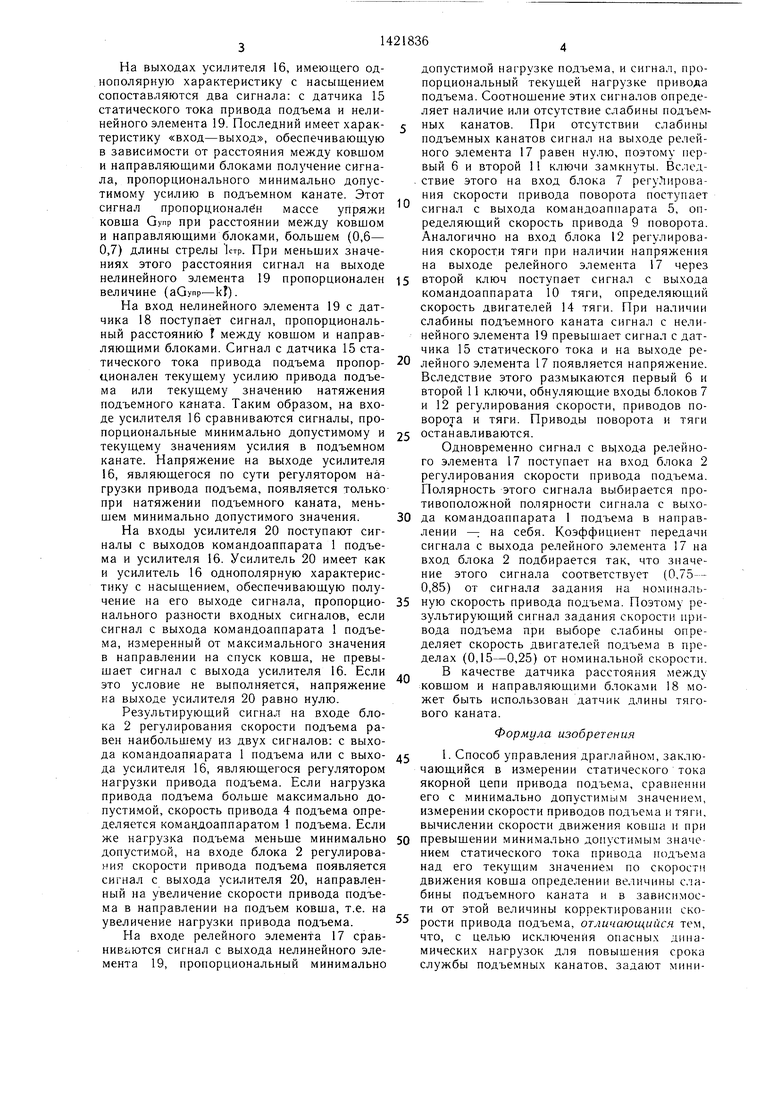
На чертеже изображена функциональная схема устройства, реализующего предлагаемый способ управления драглайном.
Устройство, реализующее способ управления драглайном, с главными электроприводами, выполненными по системе управляемый преобразователь с блоками регулирования скорости, управляемыми с помощью командоаппаратов, содержит командоаппа- рат 1 подъема, подключенный к блбку 2 регулирования скорости привода подъема, выходом связанной с преобразователем 3, питающим привод 4 подъема. Командоаппа- рат 5 поворота через первый ключ 6 подключен к входу блока 7 регулирования ско5 k
Gynp - масса упряжи ковща и распорной
балки;
F - расстояние от ковша до направляющих блоков; .
ШЙОТТТ - коэффициент пропорцио- нальности. Коррекция минимально допустимой нагрузки привода подъема в зависимости от расстояния между ковшом и направляющими конст- 10 блоками осуществляется из-за необходимости учесть влияние массы подъемных канатов и усилий, создаваемых образованными подъемными канатами цепных линий. Установлено, что влияние массь подъемных канатов и образованных ими цепных линий
5 оказывает незначительное влияние на требуемое значение минимально допустимой нагрузки подъема при бо,льшем (0,6- 0,7)FcTp. При расстоянии от ковша до направляющих блоков, меньшем (0,6-0,7)1стр,
2Q минимально допустимую нагрузку подъема для устранения возможности прослабления подъемного каната при движении ковша по забою необходимо увеличивать согласно приведенной зависимости. Коэффициент а, определяющий верхний предел минимально
рости привода, поворота, выход которого свя- 5 допустимой нагрузки подъема Злмкк, при зна- зан с преобразователем 8 поворота, питаю-чениях свыше трех вызывает ухудшение защим привод 9. Командоаппарат 10 через ВТО-глубления ковша, а при значениях мень30
рой ключ 11 подключен по входу блока 12 регулирования скорости тяги.
Блок 12 регулирования скорости тяги подсоединен к преобразова- елю 13 тяги, питающему привод 14 тяги. Датчик 15 статического тока привода подъема связан с входом усилителя 16 с насыщением и релейного элемента 17. Датчик 18 расстояния между ковщом и направляющими блоками .2 через нелинейный элемент 19 подключен к вторым входам релейного элемента 17 и усилителя 16, выход которого подключен к входу усилителя 20, другим входом соединенного с командоапп аратом 1 подъема.
ше двух приводит к прослаблению подъемных канатов.
Одновременно с коррекцией минимально допустимой нагрузки привода подъема определяют текущую нагрузку привода подъема и сопоставляют их между собой. При превышении минимально допустимой нагрузки подъема над ее текущим значением, что свидетельствует о наличии слабины подъемного каната, блокируют движение приводов поворота и тяги уменьшением до нуля результирующего задающего сигнала этих приводов, а скорости привода подъема ограничивают значением .(0,15-0,25) ее макси- 40 мального значения. Как показали исследования и тензометрирование стрелы эксква- тора, большее значение скорости подъема при выборе слабины каната приводит к значительным нагрузкам, меньшее значение скорости подъема отрицательно сказывается на производительности из-за большой длительности процесса выбора слабины подъемного каната, если она образовалась.
Способ осуществляют следующим образом.
Задают минимальное значение нагрузки привода подъема, равное Gynp,.которое обес- - печивает поддержание «на весу распорной балки и упряжи ковша, если ковш находится под головными блоками стреловой конструкции. При этом измеряют расстояние от ковша до направляющих блоков. В соотОдновременно с коррекцией минимально допустимой нагрузки привода подъема определяют текущую нагрузку привода подъема и сопоставляют их между собой. При превышении минимально допустимой нагрузки подъема над ее текущим значением, что свидетельствует о наличии слабины подъемного каната, блокируют движение приводов поворота и тяги уменьшением до нуля результирующего задающего сигнала этих приводов, а скорости привода подъема ограничивают значением .(0,15-0,25) ее макси- 40 мального значения. Как показали исследования и тензометрирование стрелы эксква- тора, большее значение скорости подъема при выборе слабины каната приводит к значительным нагрузкам, меньшее значение скорости подъема отрицательно сказывается на производительности из-за большой длительности процесса выбора слабины подъемного каната, если она образовалась.
Ограничение только скорости привода подъма не исключает возможности подхва45
ветствии с измеренным расстоянием коррек- гп та груженого ковша с большой скоростьк).
тируют заданную минимальную нагрузку привода 5„ии11 подъема согласно зависимости
5„мин Gynp при (0,6-0,7) и
S,,M..K а Gynp - kf при (0,6-0,7), где Рстр - длина стрелы; а (2-3)-коэффициент, определяющий верхний предел минимально допустимой нагрузки привода подъема;
при котором кинематическая энергия движущихся масс переходит в потенциальную энергию деформации канатов. Этим объясняется необходимость блокирования приводов поворота и тяги при наличии слаби- 55 ны подъемных канатов.
Устройство для реализации способа управления драглайном работает следующим образом.
k
гр бл ти то м ка
0
ше двух приводит к прослаблению подъемных канатов.
Одновременно с коррекцией минимально допустимой нагрузки привода подъема определяют текущую нагрузку привода подъема и сопоставляют их между собой. При превышении минимально допустимой нагрузки подъема над ее текущим значением, что свидетельствует о наличии слабины подъемного каната, блокируют движение приводов поворота и тяги уменьшением до нуля результирующего задающего сигнала этих приводов, а скорости привода подъема ограничивают значением .(0,15-0,25) ее макси- 0 мального значения. Как показали исследования и тензометрирование стрелы эксква- тора, большее значение скорости подъема при выборе слабины каната приводит к значительным нагрузкам, меньшее значение скорости подъема отрицательно сказывается на производительности из-за большой длительности процесса выбора слабины подъемного каната, если она образовалась.
Ограничение только скорости привода подъма не исключает возможности подхва5
при котором кинематическая энергия движущихся масс переходит в потенциальную энергию деформации канатов. Этим объясняется необходимость блокирования приводов поворота и тяги при наличии слаби- ны подъемных канатов.
Устройство для реализации способа управления драглайном работает следующим образом.
На выходах усилителя 16, имеющего од- нополярную характеристику с насыщением сопоставляются два сигнала: с датчика 15 статического тока привода подъема и нелинейного элемента 19. Последний имеет характеристику «вход-выход, обеспечивающую в зависимости от расстояния между ковшом и направляющими блоками получение сигнала, пропорционального минимально допустимому усилию в подъемном канате. Этот сигнал пропорционален массе упряжи ковша Gynp при расстоянии между ковшом и направляющими блоками, большем (0,6- 0,7) длины стрелы 1стр. При меньших значениях этого расстояния сигнал на выходе нелинейного элемента 19 пропорционален величине (aGynp-k).
На вход нелинейного элемента 19 с датчика 18 поступает сигнал, пропорциональный расстоянию Г между ковщом и направляющими блоками. Сигнал с датчика 15 статического тока привода подъема пропорционален текущему усилию привода подъема или текущему значению натяжения подъемного каната. Таким образом, на входе усилителя 16 сравниваются сигналы, пропорциональные минимально допустимому и текущему значениям усилия в подъемном канате. Напряжение на выходе усилителя 16, являющегося по сути регулятором нагрузки привода подъема, появляется только при натяжении подъемного каната, меньшем минимально допустимого значения.
На входы усилителя 20 поступают сигналы с выходов командоаппарата 1 подъема и усилителя 16. Усилитель 20 имеет как и усилитель 16 однополярную характеристику с насыщением, обеспечивающую получение на его выходе сигнала, пропорционального разности входных сигналов, если сигнал с выхода командоаппарата 1 подъема, измеренный от максимального значения в направлении на спуск ковща, не превы- щает сигнал с выхода усилителя 16. Если это условие не выполняется, напряжение на выходе усилителя 20 равно нулю.
Результирующий сигнал на входе блока 2 регулирования скорости подъема равен наибольшему из двух сигналов: с выхода командоапиарата 1 подъема или с выхо- да усилителя 16, являющегося регулятором нагрузки привода подъема. Если нагрузка привода подъема больще максимально допустимой, скорость привода 4 подъема определяется командоаппаратом 1 подъема. Если же нагрузка подъема меньще минимально допустимой, на входе блока 2 регулирования скорости привода подъема появляется сигнал с выхода усилителя 20, направленный на увеличение скорости привода подъема в направлении на подъем ковща, т.е. на увеличение нагрузки привода подъема.
На входе релейного элемента 17 сравниваются сигнал с выхода нелинейного элемента 19, пропорциональный минимально
0
5
5
з
допустимой нагрузке подъема, и сигнал, пропорциональный текущей нагрузке привода подъема. Соотношение этих сигналов определяет наличие или отсутствие слабины подъемных канатов. При отсутствии слабины подъемных канатов сигнал на выходе релейного элемента 17 равен нулю, поэтому первый 6 и второй 11 ключи замкнуты. Вс.пед- ствие этого на вход блока 7 регулирования скорости привода поворота поступает сигнал с выхода командоаппарата 5, определяющий скорость привода 9 поворота. Аналогично на вход блока 12 регулирования скорости тяги при наличии напряжения на выходе релейного элемента 17 через второй ключ поступает сигнал с выхода командоаппарата 10 тяги, определяющий скорость двигателей 14 тяги. При наличии слабины подъемного каната сигнал с нелинейного элемента 19 превышает сигнал с датчика 15 статического тока и на выходе ре0 лейного элемента 17 появляется напряжение. Вследствие этого размыкаются первый 6 и второй 11 ключи, обнуляющие входы блоков 7 и 12 регулирования скорости, приводов поворота и тяги. Приводы поворота и тяги останавливаются.
Одновременно сигнал с выхода релейного элемента 17 поступает на вход блока 2 регулирования скорости привода подъема. Полярность этого сигнала выбирается противоположной полярности сигнала с выхо0 да командоаппарата 1 подъема в направлении -, на себя. Коэффициент передачи сигнала с выхода релейного элемента 17 на вход блока 2 подбирается так, что значение этого сигнала соответствует (0.75- 0,85) от сигнала задания на номнналь5 ную скорость привода подъема. Поэтому результирующий сигнал задания скорости привода подъема при выборе слабины определяет скорость двигателей подъема в пределах (0,15-0,25) от номинальной скорости. В качестве датчика расстояния между ковщом и направляющими блоками 18 может быть использован датчик длины тягового каната.
Формула изобретения
I. Способ управления драглайном, заключающийся в измерении статического тока якорной цепи привода подъема, сравпении его с минимально допустимым значением, измерении скорости приводов подъема и тяги, вычислении скорости движения ковша и при превыщении минимально допустимым значением статического тока привода подъема над его текущим значением по скорости движения ковща определении величины слабины подъемного каната и в зависимости от этой величины корректировании скорости привода подъема, отличающийся тем, что, с целью исключения опасных динамических нагрузок для повышения срока службы подъемных канатов, задают мини0
0
5
мальное значение нагрузки привода подъема, затем корректируют минимально донус- тимую нагрузку привода подъема в функцию расстояния S от ковша до направляющих блоков в соответствии с зависимостью
5пм,и, Gyrip при F/FCTP {0,6-0,7)
и
Sii мин aG
упр
kfnpn f/FcTp (0,6-0,7),
где f - длина стрелы;
f- расстояние от ковша до направлющмх блоков; Супр - масса распорной балки и упряжи
ковша;
а (2-3) -коэффициент, определяюш,ий верхний предел минимально допустимой нагрузки привода подъема;
()0упр
-/rTciirr-yvpкоэффициент пропорцио(0,Ь и,/Дстр нальности.
скорректированную минимально допустимую нагру; ку сравнивают с текуш,ей нагрузкой привода подъема и при превышении ее уменьшают до нуля результируюш,ий сигнал приводов поворота и тяги, а скорость привода подъема ограничивают значением (0,15- 0,25) ее максимального значения.
0
с его первым входом, подключенным к электроприводу подъема, датчик статической составляющей тока, подключенный к первому входу первого усилителя, выход которого соединен с первым входом второго усилителя, выход которого подключен к второму входу блока регулирования привода подъема, выход датчика статической составляющей тока подключен также к первому входу релейного элемента, выход которого соединен с первыми входами первого и второго ключей, датчик расстояния от ковша до направляющих блоков, а также нелинейный элемент, отличающееся тем, что оно снабжено блоком
г регулирования скорости поворота с командоаппаратом, блоком регулирования привода тяги с командоаппаратом, электроприводом поворота и электроприводом тяги, причем датчик расстояния от ковща до направляющих блоков соединен через нелинейный эле0 мент с вторыми входами релейного элемента и первого усилителя, а с вторым входом второго усилителя связан выход коман- доаппарата привода подъема, выход релейного элемента соединен также с третьим входом блока регулирования скорости подъема, командоаппараты привода поворота и тяги соединены соответственно с вторыми входами первого и второго ключей, выходы которых подключены соответственно к блокам регулирования скорости поворота и приводам тяги, подключенным к электроприводам поворота и тяги.
5
0
| Авторское свидетельство СССР, № 599023, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1977 |
|
SU639999A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
