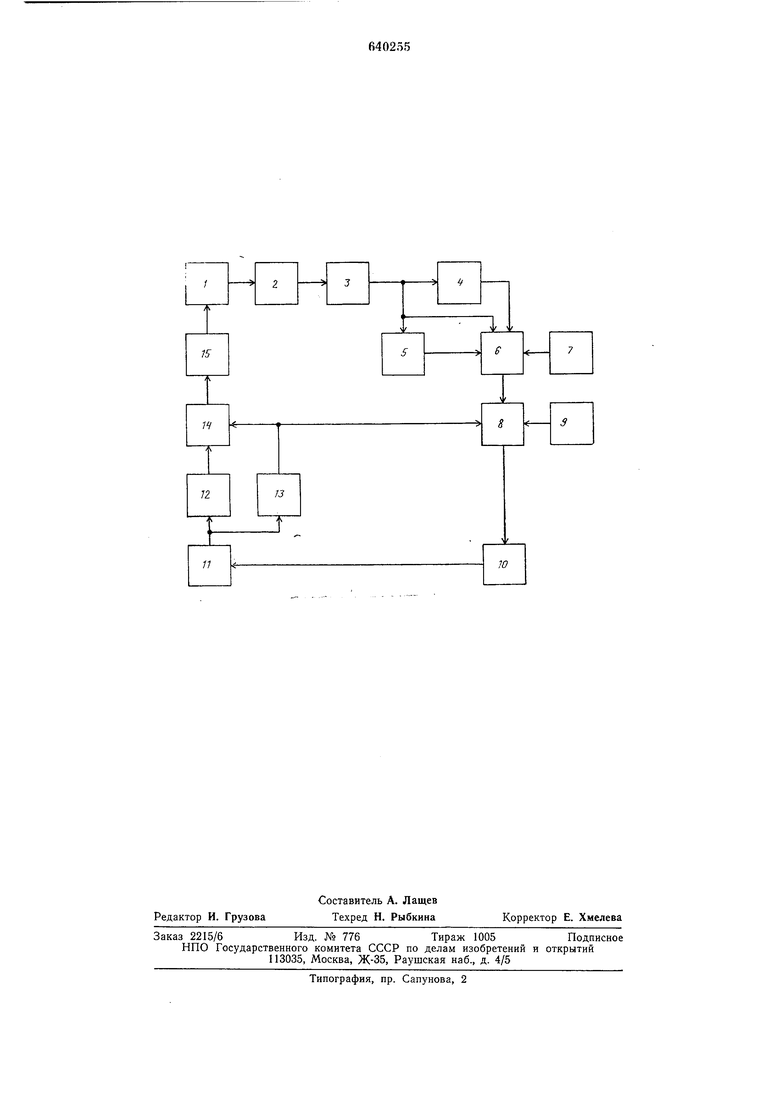
ключей датчик 2 регулируемого сигнала, выход которого подсоединен к первому дифференциатору 3, сигнал которого одновременно подается на второй дифференциатор 4, на вход блока 5 выделения модуля и на вход сумматора 6. На входы сумматора 6 поступают сигналы с выхода блока 5 выделения модуля, с выхода дифференциатора 4 и источника 7 опорного сигнала. Второй коммутатор 8 соединяет поочередно выход сумматора 6 и выход источника 9 регулируемого онорного сигнала с входом преобразователя 10 напряжение-временной интервал. Сигнал с выхода преобразователя напряжение- временной интервал подается на вход счетчика 11 импульсов, выход которого подключен к счетному входу триггера 12 и входу первого коммутатора 13. Выход триггера 12 через третий коммутатор 14 подсоединен к исполнительному механизму 15, воздействующему на объект 1 оптимизации. Первый коммутатор синхронно переключает обе коммутирующие цепи второго и третьего коммутаторов.
Рассмотрим работу предлагаемого устройства.
Сигнал YI, пропорциональный первой производной выходной координаты объекта 1 оптимизации, с выхода дифферепциатора 3 одновременно проходит на блок 5 выделения модуля и вход сумматора 6. На входы сумматора поступает сигнал У от блока 5 выделения модуля, сигнал Y от дифференциатора 4 и сигнал f/o от источника 7 опорного сигнала. Таким образом, выходной сигнал сумматора равен
Н() у. + у + у. + 1 Коммутатор 8 поочередно подключает к входу преобразователя 10 напряжение- временной интервал выход сумматора 6 и выход источника 9 регулируемого опорного сигнала. Сигнал с выхода преобразователя напрял ение-временной интервал поступает на счетчик И импульсов. Коммутатор 13 синхронно переключает обе коммутирующие цепи одновременно с появлением сигнала на выходе счетчика 11 импульсов. Коммутатор 14 отключает выход триггера 12 от исполнительного механизма 15, обесточивая цепь питания последнего.
Таким образом, время движения исполнительного механизма в одну сторону определяется величиной выходного сигнала сумматора, коэффициентом пересчета счетчика импульсов и крутизной выходного сигнала элемента сканирования в преобразователе напряжение-временной интервал. Время неподвижного состояния исполнительного механизма определяется величиной выходного напряжения источника регулируемого опорного сигнала, коэффициентом пересчета счетчика импульсов и крутизной выходного сигнала элемента сканирования в преобразователе напряжение-временной интервал.
Величина опорного сигнала L/o, крутизна выходного сигнала элемента сканирования в преобразователе напряжение-временной интервал, напряжение источника регулируемого опорного сигнала могут быть выбраны из условий получения требуемой амплитуды выходной координаты объекта оптимизации и требуемой скорости выхода в область экстремума. Величина напряжения источника регулируемого опорного сигнала и коэффициент пересчета счетчика импульсов выбираются с учетом величины транспортного запаздывания объекта. Таким образом, предлагаемый регулятор
позволяет осуществить оптимальное регулирование инерционного объекта с транспортным запаздыванием в условиях интенсивных помех с больщой скоростью выхода в район экстремума, снижает потери на поиск, а следовательно, увеличивает точность и обеспечивает устойчивость системы независимо от начальных условий, улучщает режим работы исполнительного механизма, уменьщает инерционность последнего.
Техническая реализация регулятора достаточно простая и может быть осуществлена на типовых элементах серийного выпуска.
Формула изобретения
Экстремальный регулятор, содержащий иснолнительный механизм, преобразователь
напряжение-временной интервал и последовательно соединенные датчик регулируемого сигнала, первый дифференциатор, второй дифференциатор и сумматор, к второму входу которого подсоединен выход блока
выделения модуля, к третьему входу - выход источника опорного напряжения, а к четвертому - вход блока выделения модуля и выход нервого дифференциатора, о тличающийся тем, что, с целью увеличения точности и устойчивости регулятора, он содержит первый коммутатор, носледовательно соединенные источник регулируемого опорного сигнала и второй коммутатор и последовательно соединенные счетчик импульсов, триггер и третий коммутатор, выход которого соединен с входом исполнительного механизма, выход сумматора соединен с вторым входом второго коммутатора, выход которого соединен через преобразователь напряжение-временной интервал с входом счетчика импульсов, выход которого через первый коммутатор соединен с вторым входом третьего коммутатора и третьим входом второго коммутатора.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 140114, кл. G 05В 13/02, 1961.
2.Авторское свидетельство СССР № 525927, кл. G 05В 13/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1980 |
|
SU941929A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1119050A1 |
| Устройство для измерения частоты | 1975 |
|
SU636552A1 |
| Аналого-цифровой преобразователь параметров диэлькометрического датчика | 1988 |
|
SU1547063A1 |
| Цифровая система измерения глубинного положения морской пьезосейсмографной косы | 1976 |
|
SU894640A1 |
| Устройство для управления ромбическим манипулятором | 1983 |
|
SU1315933A1 |
| АНАЛИЗАТОР ВЫБРОСОВ СЛУЧАЙНЫХ ПРОЦЕССОВ | 1972 |
|
SU347765A1 |
| Устройство для управления исполни-ТЕльНыМи МЕХАНизМАМи | 1979 |
|
SU811217A1 |
| Устройство контроля материала в приемной зоне дробилки | 1983 |
|
SU1156735A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ВАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017156C1 |