Изобретение относится к области автоматического регулирования инерционных объектов, обладаюгцих значительным транспортным запаздыванием.
Известен ряд быстродействующих экстремальных регуляторов, предназначенных для оптими зации работы инерционных объектов на основе анализа информации с производных от выходной координаты объекта .
Однако известное устройство обеспечивает требуемое количество процесса регулирования, если транспортное запаздывание у объекта много меньше половины периода автоколебаний, которые могли бы установиться при прочных равных условиях у инерционного объекта без транспортного запаздывания. При времени транспортного запаздывания больше указанной величины известное устройство не обеспечивает устойчивости поиска экстремума.
Наиболее близким к предлагаемому является быстродействующий экстремальный регулятор для объектов, обладающих транспортным запаздыванием, соизмеримым с постоянной времени объекта или даже значительно большем ее. Известный регулятор содержит первый коммутатор, первый преобразователь
напряжение - временной интервал, источник регулируемого опорного сигнала, последовательно соединенные триггер, второй коммутатор и .исполнительный механизм, последовательно соединенные датчик регулируемого сигнала, первый и второй дифференциаторы и сумматор, ко второму входу которого подсоединен выход первого дифферен10циатора, к третьему - выход источника опорного сигнала, а исполнительный механизм через объект управления соединен с датчиком регулируемого сигнала.
15
Регулятор осуществляет формирование напряжения, пропорционального сумме некоторого., бйорного сигнала, первый и второй производных с. последующим преобразованием этого напряжения
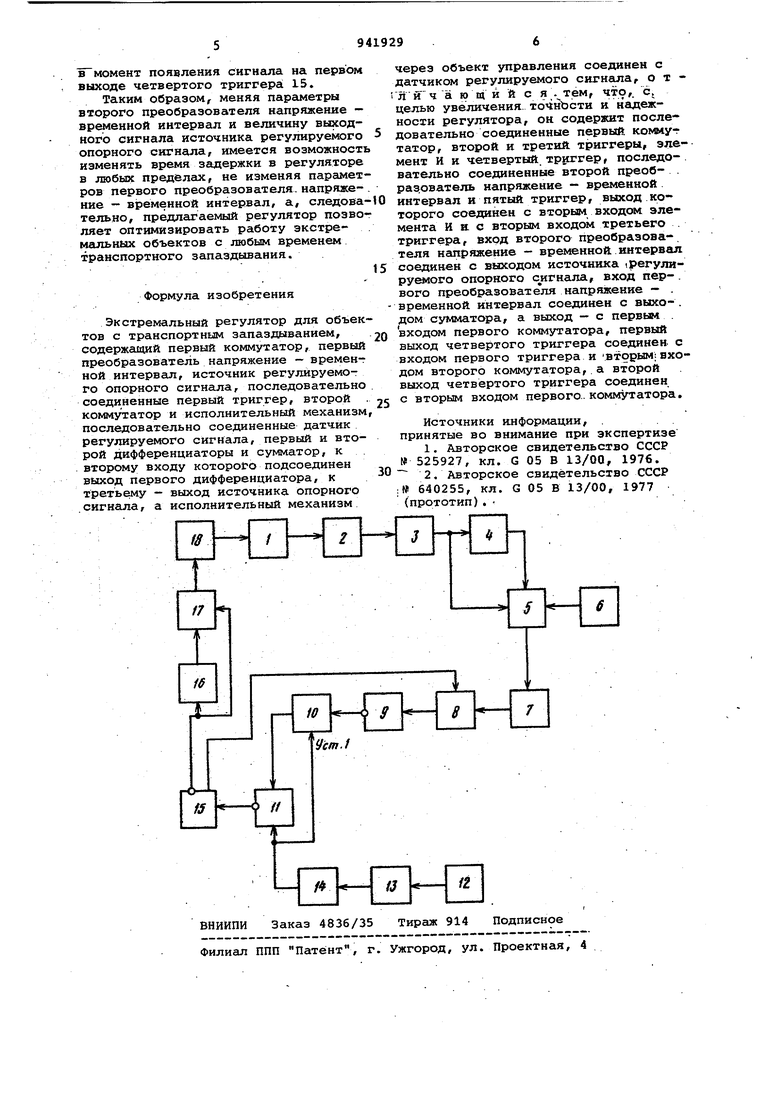
20 во временной интервал,в течение которого скорость исполнительного механизма отлична от нуля. Кроме того, в известном экстремальном регуляторе путем подачи некоторого опорного ре25гyлиps oщeгo сигнала на вход преобразователя напряжения формируется временной интервал, в течение которого скорость исполнительного механизма равна нулю, причем длительность это30го временного интервала необходимо формировать близкой к величине транспортного запаздывания объекта 2). Недостатком известного экстремаль ного регулятора является зависимость качества его работы от величины тран спортного запаздьгоания в канале передачи управляющего воздействия. При большом времени транспортного запаздывания величины регулируемого опорного сигнала недостаточно для Формирования временного интервала близког к величине транспортного запаздывани при заданных параметрах преобразователя напряжения - временной интервал. Изменение параметров преобразователя напряжение - временной интервал с целью увеличения времени неподвижного состояния исполнительного механизма влечет за собой увеличение периода рыскания, что эквивалент но ухудшению качества работы экстремального регулятора. Кроме того, наличие трех коммутаторов существенно усложняет регулятор, а, следовательно, снижает его надежность. Цель изобретения - повышение точности и надежности экстремального ре гулятора инерционных объектов, обладающих большим транспортным запаздыванием. Поставленная цель достигается тем что экстремальный регулято содержит последовательно соединенные первый .коммутатор, второй и третий триг геры элемент И и четвертый триггер последовательно соединенные второй преобразователь напряжение -.временной интервал и пятый триггер, выход которого соединен со вторым входом элемента И и со вторьм входом третьего- триггера, вход .второго преобра-. зователя напряжение - временной интервал соединен с выходом источника регулируемого опорного сигнала, вход первого преобразователя напряжение - временной интервал соединен с выхо-. сумматора, а выход - с первым. . входом первого коммутатора, первый выход четвертого триггера соединен со входом первого триггера, и вторым в содом второго коммутатора, а второй выход четвертого триггера соединен со вторым входом первого коммутатора. На чертеже показана структурная схема предлагаемого устройства. К выходу объекта 1 управления под .ключен датчик 2 регулируемого сигнала, выход которого подсоединен к .первс у дифференциатору 3, выходной сигнад которого одновременно подается на второй дифференциатор 4:и на . первый вход сумматора 5. На третий вход сумматора 5 поступает сигнал источника 6 опорного напряжения. С выхода сумматора 5 сигнал подается на вход первого преобразователя 7 напряжение - временной интервал, с выхода которого через первый коммутатор 8 второй триггер 9 И третий триггер) 10 сигнал подается Иа первый вход элемента И 11. С выхода источника 12 регулируемого опорного сигнала, сигнал .через последовательно соединенные второй преобразователь 13 напряжение - временной интервал, пятый триггер 14 поступает на второй вход элемента И 11, выход которого соединен со входом четвертого триггера 15,. первый выход которого подключен ко входу первого триггера Д 6 и ко второму входу коммутатора 17, а второй выход ко второму входу коммутатора 8. Первый вход коммутатора 17 подсоединен к выходу триггера 16. Выход коммутатора 17 подключен к исполнительному .механизму 18, воздействующему на объект 1 управления. Для установки третьего триггера 10 в единичное состояние выход пятого триггера 14 подключен ко второму входу третьего триггера 10. Устройство работает следующим образом. Сигнал U|пропорциональный первой производной выходной координаты объекта 1 управления, с выхода дифференциатора 3 одновременно подается на второй дифференциатор 4 и первый вход сумматора 5. Кроме того, на вход сумматора 5 поступают сигналы выхода второго дифференциатора 4 и сигнал UoOT источника б опорного сигнала. Выходной сигнал сумматора 5 подается на вход первого преобразователя 7 напряжение - временной интервал, при появлении сигнала на втором выходе четвертого триггера 15 коммутатор 8 подключает выход первого преобразователя 7 напряжение - временной интервал ко входу второго триггера 9, выход которого поступает на первый вход третьего триггера 10, с выхОда которого х:игнал .подается на первый вход элемента И 11. Выходной сигнал источника 12 подается на вход второго преобразователя.13 напряжение временной интервал, где преобразуется в последовательность импульсов, которые поступакхт через пятый триггер 14 на второй вход элемента И и второй вход третьего триггера Ю. в момент появления единицы на обоих входах элемента И 11 происходит переклочение четвертого триггера 15. Сигнал со второго выхода четвертого триггера 15 управляет работой коммутатора 8. Сигнал с первого выхода четвертого триггера 15 переключает триггер 16 и через коммутатор 17 переключает его выход на вход исполнительного механизма 18. Коммутатор 17 отключает выход триггера 16 от исполнительного механизма 18, обесЛ1ечивая цепь питания последнего в момент появления сигнала на первом выходе четвертого триггера; 15. таким образом, меняя парс1метры второго преобразователя напряжение - временной интервал и величину выходного сигнала источника регулируемого опорного сигнала, имеется возможность изменять время задержки в регуляторе в любых пределах, не изменяя параметров первого преобразователя.напряхение - временной интервал, а, следовательно, предлагаемый регулятор позволяет оптимизировать работу экстремешьных объектов с любым временем транспортного запаздывания. Формула изобретения Экстремальный регулятор для объектов с транспортным запаздыванием, содержащий первый коммутатор, первый преобразователь напряжение - временг НОЙ интервсш, источник регулируемого опорного сигнала, последовательно соединенные первый триггер, второй . коммутатор и исполнительный механизм последовательно соединенные датчик регулируемого сигнала, первый и второй дифференциаторы и сумматор, к . второму входу которого подсоединен выход первого дифференциатора, к третьему - выход источника опорного сигнала, а исполнительный механизм через объект управления соединен с датчиком регулируемого сигнала, о т ю щ и И с я.тем, что,, с, целью увеличения точнЪсти и надежности регулятора, он содержит последовательно соединенные первый, комму-г татор, второй и третий, триггеры, элемент И и четвертый триггер, последовательно соединенные второй преоб- . разователь напряжение - временной интервал и пятый триггер, выход которого соединен с вторым входом элемента Икс вторым входом третьего . триггера, вход второго преобраэова-, теля напряжение - временной интервал соединен с выходом источника (Регулируемого опорного с 1гнала, вход пер-. вого преобразователя напряжение - . временной интервал соединен с выхо- . дом сумматора, а выход - с первым . входом первого коммутатора, первый выход четвертого триггера соединен с входом первого триггера и -вторым:входом второго коммутатора,. а второй выход четвёртого триггера соединен с вторым входом первого.коммутатора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 525927, кл. G 05 В 13/QQ, 1976. 2.Авторское свидетельство СССР 640255, кл. G 05 В 13/00, 1977 (прототип). .
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор | 1977 |
|
SU640255A1 |
| Система управления | 1983 |
|
SU1168896A1 |
| Регулятор для объектов с запаздыванием | 1977 |
|
SU708302A1 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1978 |
|
SU930251A2 |
| Многоканальный регулятор | 1986 |
|
SU1388840A1 |
| Самонастраивающаяся система управления диаметром и влажностью жил на бумагомассных машинах | 1986 |
|
SU1462275A1 |
| Устройство автоматического регулирования толщины полосы на непрерывном прокатном стане | 1987 |
|
SU1435347A1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
