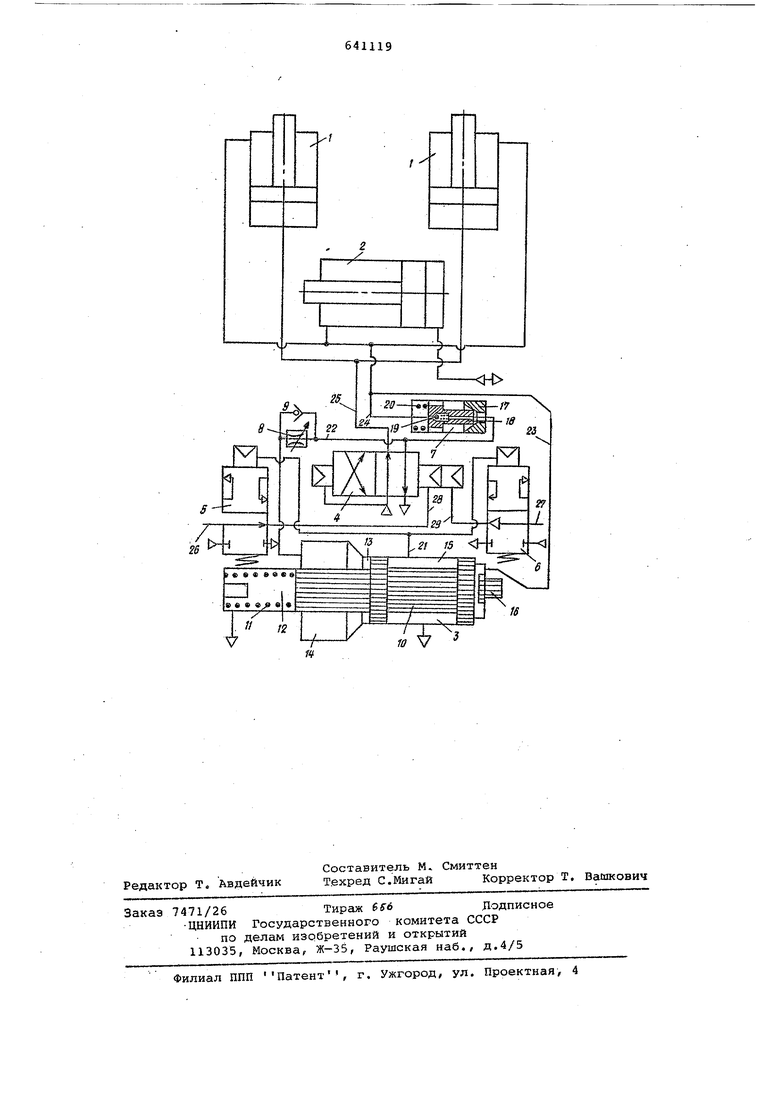
Изобретение устраняет указанные не достатки, обеспечивая повышение надеж ности и производительности крепления. Эта цель достигается тем, что устройство снабжено трехкамерньам элементом сравнения, одна изкамер которого является емкостью, подключенной через регулируемый дроссель с обратным клапаном ко второму входу первого гидравлического распределителя, причем первая камера трехкамерного элемента сравнения непосредственно соединена .со штоковыми полостями гидростоек и гидродомкрата передвижки секции крепи, а вторая его камера соединена с камерами управления второго и третьего гидравлических распределителей. На чертеже изображена гидравлическая принципиальная схема устройства, Устройство автоматического управле ния передвижной гидравлической крепью .включающей гидростойки 1 и гидродомкрат передвижки 2, состоит из трехкамерного элемента сравнения 3, трех , .гидравлических распределителей 4,5, б, двух регулируемых дросселей 7,8 и обратного клапана 9. Элемент сравнения 3 состоит из двухступенчатого золотника 10 с проточкой на большей ступени, взаимодействующего с пружиной 11, корпуса с камерами разного поперечного сечения 12, 13, 14, 15 и упора 16. Камера 15 служит емкостью. Регулируемый дроссель 7 содержит седло 17, клапан 18, в который встроен обратный клапан 19 и который прижимается к седлу пружиной 20. Отдельные элементы устройства соединены между собой каналами. При этом канал 21 соединяет камеру 15 элемента 3 с управляющими камерами гидравличес них распределителей 5 и б, канал 22 .соединяет камеру 14 элемента сравнения 3 с входом дросселя 7. В этот канал встроены дроссель 8 и обратный клапан 9. Камера 13 со стороны упора 16 соединена каналом 23 с каналом 24 соединяющим распределитель 4 с штоковыми полостями гидростоек 1 и домкрата 2. Распределитель 4 соединен каналами 25 с поршневыми полостями гидрои fi ппроистоек 1. Распределители 5 и 6 соединены каналами 26 и 27 с такими же рас пределителями на смежных секциях крепи и каналами 28 и 29 с управляющими камеоами распределителя 4. Камеры 11 и 15 элемента сравнения J соединены со сливом.Кроме того, распределители 4, 5, 6 соединены с .линиями напора и слива (не показаны на чертеже), идущими вдоль крепи от насосной установ ки. Поршневая полость домкрата 2 сое динена или с отдельной магистралью вьщвижки конвейера (не показана на чертеже) или со сливной магистралью. Работает устройство автоматическо (ГО управления следующим образом, В исходном положении поршневые полости гйдростоек 1 через канал 25 ираспределитель 4 соединены с линиями напора и слива. Штоковые полости гидростоек 1 и домкрата 2 через канал 24, регулируемый дроссель, 7, обратный клапан 13 и распределитель 4 соединены со сливом. Со сливом соединена также поршневая полость домкрата 2. Все гидроэлементы находятся в исходном положении. Канал 21 через камеру 15 и проточку на большей ступени золотника 10 элемента сравнения 3 соединена со сливом.. При поступлении командного сигнала повышенного давления справа через элемент 5 по каналу 26 или слева через элемент 6 по каналу 27 в управляющую камеру распределителя 4, (JJH переключается и рабочая среда под давлением по каналу 24 через дроссель 7 поступает в штоковые полости гидростоек 1 и домкрата 2. Поршневые полости стоек 2 через канал 25 и распределитель 4 соединяются со сливом. Поршневая полость домкрата 2 соединяется со сливом через пульт управления (не показан на чертеже), расположенный в штреке. Рабочая среда поступает в дроссель 7,и, сжимая пружину 20, отжимает клапан 18 от седла 17. Торец клапана 18, взаимодействующий с седлом 17, выполнен плоским, благодаря чему при изменении скорости движения гидродомкрата до определенной величины проходное сечение между седлом . и клапаном изменяется таким образом, что перепад давления , сохраняется постоянным. Постоянству перепада давления способств-ует ;также настройка пружины 20. Одновре менно рабочая среда по каналу 23 поступает под один.торец золотника 10 элемента сравнения 3 со стороны упора 16, а по каналу 22 через обратный клапан 9 поступает в камеру 14 большего поперечного сечения элемента 3. Камера 12 постоянно соединена со сливом или атмосферой. Диаметр золотника 10 и усилие пружины 11 выбраны такими, чтобы при заданном перепаде давления на дросселе золотник 10 находился в исходном положении (на рисунке это крайнее положение). При этом канал 20 соединяется со сливом. когда секция встречает какое-либо препятствие, скорость гидррдомкрата 2 начинает снижаться и уменьшается расход жидкости через дроссель 7. При уменьшении расхода ниже допустимой величины или вообще при прекращении расхода, вызванном полной остановкой, перепад давления также уменьшается до некоторой заданной величины или вообще.становится равным нулю. Одновременно/ при замедлении движения или остановке, величина давления возрастает и, когда она превысит величину давления, которая имеет место при нормальной передвижке, на определен-, 5 йуга величину, равновесие золотника. 10 нарушается, и он начинает смещать ся влево, сжимая пружину 11.Жидкость из камеры 14 вытесняется через дроссель 8. Объем камеры 14 и настройка дросселя 8 выбраны такими, чтобы обеспечить некоторую выдержку времени. Эта вьщержка времени соответству ет времени, в течение которого секция может преодолеть препятствие (оп ределяется опытным путем). За этот промежуток времени золотник 10 не успевает сместиться в крайнее левое положение и канал 21 продолжает оста ваться соединенным со сливом. Если за этот промежуток времени секция сможет преодолеть сопротивление и начнет движение, на дросселе 7 снова возникает перепад давления и золотник 10 возвращается в исходное положение.. Секция продолжает движение. Если секция не сможет преодолеть сопротивление за заданную выдержку вре мени, то золотник 10 смещается в кра нее левое положение. При этом поясок золотника 10 выходит за кромку между камерами 13 и 14, канал 21 соединится с каналом 22 и рабочая среда под давлением через распределитель 4 и обратный клапан 9 поступает в управляющую камеру элементов 5/ б и переключает их. В результате этого распределитель 4 возвращается в исходное положение и секция начинает рас;Пираться, а командный сигнал по кана Лам 26 и 27 поступает на смежную сек цию, которая начинает разгружаться и передвигаться. Если секция не встречает препятстВИЙ на своем пути, то по достижении крайнего переднего положения гидродом крат 2 воздействует на упор 16, пере ключает золотник 10, так как усилия домкрата 2 достаточно, чтобы вытеснить жидкость из камеры 14 через дро сель 8 практически мгновенно. Поэтому при- нормальном цикле передвижки секции без препятствий выдержка времени определяемая параметрами элемента сравнения 3 и дросселей 7 и 8, не уве 96 личивает время цикла передвижки секции, т.е. элемент сравнения 3 выполняет функции известных датчиков контроля переднего положения с механическим воздействием. Формула изобретения Устройство автоматического управ-. ления передвижной гидравлической крепью, содержащее на каждой секции крепи регулируемые дроссели, обратные клапаны и три гидравлических распределителя, соединенные с магистралями напора и слива крепи, первый из которых своим первым выходом непосредственно соединен с поршневыми полостями гидростоек секции крепи и вторым выходом через регулируемый дроссель и обратный клапан соединен со штоковыми полостями гидростоек и гидродомкрата передвижки секции, а второй и третий гидравлические распределители своими выходами подключены к камере управления первого гидравлического распределителя и своими входами к гидравлическим распределителям смежных секций, отличающееся тем, что, с целью повышения надежности и производительности крепления, оно снабжено трехкамерным элементом.сравнения одна из камер которого является емкостью, подключенной через регулируемый дроссель с обратным клапаном ко второму входу первого гидравлического распределителя, причем первая камера трехкамерного элемента сравнения непосредственно соединена со штоковыми полос.тями гидростоек и гидродомкрата передвижки секции крепи, а вторая его камера соединена с камерами управле ния второго и третьего гидравлических распределителей. Источники информации, принятые во внимание при экспертизе; 1.Авторское свидетельство СССР f 359413, кл. Е 21 D 23/16, 1969. 2.Патент Франции № 2100097, кл. Е 21 С, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления секцией гидрофицированной крепи | 1980 |
|
SU1102978A1 |
| Устройство дистанционного управления секцией механизированной крепи | 1981 |
|
SU1010287A1 |
| Устройство для управления секцией гидрофицированной крепи | 1989 |
|
SU1705589A1 |
| Гидросистема секции механизированной крепи | 1985 |
|
SU1283414A1 |
| Система централизованного гидравлического или пневматического управления механизированной шахтной крепью | 1970 |
|
SU439614A1 |
| Блок управления секцией механизированной крепи | 1989 |
|
SU1687793A1 |
| Система управления секциями крепи угледобывающего агрегата | 1986 |
|
SU1320444A1 |
| Секция механизированной шахтной крепи | 1981 |
|
SU945468A1 |
| Гидросистема механизированной крепи для пластов наклонного падения | 1989 |
|
SU1681015A1 |
| Гидросистема секции механизированной крепи | 1981 |
|
SU1070319A1 |
f
Й7
